Переведите цифровой сигнал из полосы промежуточной частоты (IF) к основной полосе и десятикратно уменьшите его
dsp.DigitalDownConverter объект переводит цифровой сигнал из полосы промежуточной частоты (IF) к основной полосе и десятикратно уменьшает его.
Для цифрового преобразования входного сигнала вниз:
Создайте dsp.DigitalDownConverter объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты? MATLAB.
dwnConv = dsp.DigitalDownConverterdwnConv.
dwnConv = dsp.DigitalDownConverter(Name,Value)dwnConv, с заданным свойством Name установите на заданный Value. Можно задать дополнительные аргументы пары "имя-значение" в любом порядке как (Name1, Value1..., NameN, ValueN).
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Создайте объект цифрового преобразователя частоты для увеличения частоты дискретизации синусоидального сигнала 1 кГц в 20 раз и преобразования частоты вверх на 50 кГц. Создайте объект цифрового преобразователя частоты, который преобразует частоту вниз на 0 Гц и уменьшит часоту дискретизации в 20 раз.
Примечание: Если вы используете R2016a или более ранний релиз, заменяете каждый вызов объекта с эквивалентным синтаксисом шага. Например, obj(x) становится step(obj,x).
Создайте генератор синусоиды, чтобы получить синусоидальный сигнал на 1 кГц с частотой дискретизации 6 кГц.
Fs = 6e3; % Sample rate sine = dsp.SineWave('Frequency',1000,'SampleRate',... Fs,'SamplesPerFrame',1024); x = sine(); % generate signal
Создайте DigitalUpConverter объект. Используйте проекты фильтра минимального порядка и установите неравномерность в полосе пропускания на 0,2 дБ и затухание в полосе задерживания к 55 дБ. Установите двухстороннюю пропускную способность сигнала на 2 кГц.
upConv = dsp.DigitalUpConverter(... 'InterpolationFactor', 20,... 'SampleRate', Fs,... 'Bandwidth', 2e3,... 'StopbandAttenuation', 55,... 'PassbandRipple',0.2,... 'CenterFrequency',50e3);
Создайте DigitalDownConverter объект. Используйте проекты фильтра минимального порядка и установите неравномерность в полосе пропускания на 0,2 дБ и затухание в полосе задерживания к 55 дБ.
dwnConv = dsp.DigitalDownConverter(... 'DecimationFactor',20,... 'SampleRate', Fs*20,... 'Bandwidth', 3e3,... 'StopbandAttenuation', 55,... 'PassbandRipple',0.2,... 'CenterFrequency',50e3);
Создайте средство оценки спектра, чтобы визуализировать спектр сигнала перед преобразованием после преобразования, и после вниз преобразования.
window = hamming(floor(length(x)/10)); figure; pwelch(x,window,[],[],Fs,'centered') title('Spectrum of baseband signal x')

Преобразуйте сигнал и визуализируйте спектр
xUp = upConv(x); % up convert window = hamming(floor(length(xUp)/10)); figure; pwelch(xUp,window,[],[],20*Fs,'centered'); title('Spectrum of up converted signal xUp')

Вниз преобразуйте сигнал и визуализируйте спектр
xDown = dwnConv(xUp); % down convert window = hamming(floor(length(xDown)/10)); figure; pwelch(xDown,window,[],[],Fs,'centered') title('Spectrum of down converted signal xDown')

Визуализируйте ответ децимирующих фильтров
visualizeFilterStages(dwnConv)

Получите факторы децимации каждого этапа фильтра dsp.DigitalDownConverter Система object™.
Создайте dsp.DigitalDownConverter Системный объект с настройками по умолчанию. Используя getDecimationFactors функционируйте, получите факторы децимации каждого этапа объекта.
dwnConv = dsp.DigitalDownConverter
dwnConv =
dsp.DigitalDownConverter with properties:
DecimationFactor: 100
MinimumOrderDesign: true
Bandwidth: 200000
StopbandFrequencySource: 'Auto'
PassbandRipple: 0.1000
StopbandAttenuation: 60
Oscillator: 'Sine wave'
CenterFrequency: 14000000
SampleRate: 30000000
Show all properties
M = getDecimationFactors(dwnConv) %#okM = 1×3
25 2 2
DecimationFactor свойство объекта установлено в 100. Выход M по умолчанию 1 3 вектор, где каждым элементом в векторе является фактор полного фактора децимации.
Когда вы устанавливаете DecimationFactor к вектору 1 на 2 объект обходит фильтр третьего каскада и устанавливается коэффициент децимации первых и вторых этапов фильтрации к значениям в первых и вторых векторных элементах соответственно.
dwnConv.DecimationFactor = [10 10]
dwnConv =
dsp.DigitalDownConverter with properties:
DecimationFactor: [10 10]
MinimumOrderDesign: true
Bandwidth: 200000
StopbandFrequencySource: 'Auto'
PassbandRipple: 0.1000
StopbandAttenuation: 60
Oscillator: 'Sine wave'
CenterFrequency: 14000000
SampleRate: 30000000
Show all properties
M = getDecimationFactors(dwnConv)
M = 1×2
10 10
Выход getDecimationFactors функция является теперь вектором 1 на 2.
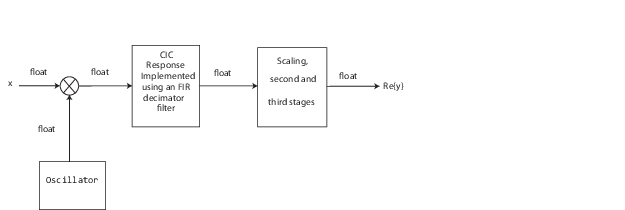
Объект downconverts входной сигнал путем умножения его с комплексной экпонентой с центральной частотой равняется значению в CenterFrequency свойство. Объект прореживает преобразованный по частоте вниз сигнал с помощью каскада трех децимирующих фильтров. В этом случае каскад фильтра состоит из CIC decimator, компенсатора CIC и третьего этапа децимации феркина. Следующая блок-схема показывает архитектуру цифрового вниз конвертер.

Масштабирующийся раздел нормирует усиление CIC и степень генератора. Это может также содержать поправочный коэффициент, чтобы достигнуть желаемой спецификации пульсации. Когда вы устанавливаете свойство Oscillator на InputPort, коэффициент нормализации не включает коэффициент мощности генератора. В зависимости от установки свойства DecimationFactor можно смочь обойти фильтр третьего каскада. Когда тип входных данных является двойным или одним, объект реализует N - децимирующий фильтр раздела CIC как КИХ-фильтр с ответом, который соответствует каскаду фильтров серии длинных импульсов N. Истинный CIC-фильтр с фактической расческой и разделами интегратора реализован, когда входные данные имеют фиксированную точку. CIC-фильтр эмулирован с КИХ-фильтром так, чтобы можно было запустить симуляции с данными с плавающей точкой.
Следующая блок-схема представляет арифметику DDC с одними или входными параметрами с плавающей точкой, с двойной точностью.
Для получения дополнительной информации операции фиксированной точки, смотрите Фиксированную точку.
Указания и ограничения по применению:
Смотрите системные объекты в Генерации кода MATLAB (MATLAB Coder).
Следующая блок-схема представляет арифметику DDC с входными параметрами фиксированной точки со знаком.
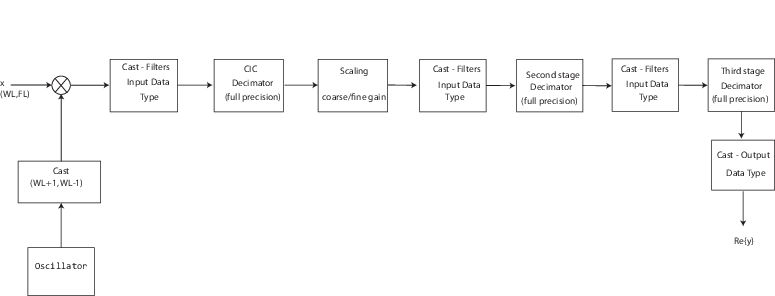
WL размер слова входа и FL дробная длина входа.
Вход каждого фильтра брошен к типу данных, заданному в свойствах FiltersInputDataType и CustomFiltersInputDataType.
Генератор выход брошен к размеру слова, равному входному размеру слова плюс один. Дробная длина равна входному размеру слова минус один.
Масштабирование при выходе CIC decimator состоит из крупных - и корректировки прекрасного усиления. Крупное усиление достигается с помощью reinterpretcast функция на CIC decimator выход. Прекрасное усиление достигается с помощью умножения полной точности.
Следующая фигура изображает крупное - и операции прекрасного усиления.
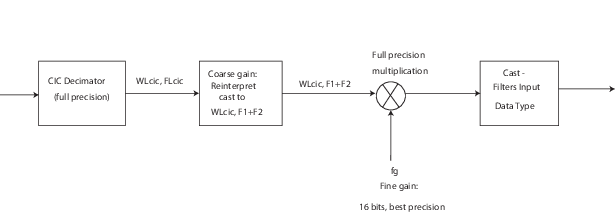
Если усиление нормализации является G (где 0 <G≦1), то:
WLcic размер слова CIC decimator выход и FLcic дробная длина CIC decimator выход
F1 = abs(nextpow2(G)), указание на часть G, достигнутого с помощью сдвигов разряда (крупное усиление)
F2 = дробная длина задана свойствами FiltersInputDataType и CustomFiltersInputDataType
fg = fi((2^F1)*G, true, 16), указание, что остающееся усиление не может быть достигнуто с небольшим сдвигом (прекрасное усиление)
fvtool | generatehdl | getDecimationFactors | getFilterOrders | getFilters | groupDelay | visualizeFilterStages