Линейная или многофазная КИХ-интерполяция
dsp.Interpolator Система object™ интерполирует значения между входными выборками с действительным знаком с помощью линейной или многофазной КИХ-интерполяции. Задайте который значения интерполировать путем обеспечения вектора точек интерполяции. Точка интерполяции 1 относится к первой выборке во входе. Чтобы интерполировать значение на полпути между второй и третьей выборкой во входе, задайте точку интерполяции 2,5. Точки интерполяции, которые не являются в допустимой области значений, заменяются самым близким значением в допустимой области значений.
Интерполировать входной сигнал с действительным знаком:
Создайте dsp.Interpolator объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты? MATLAB.
interp = dsp.Interpolatorinterp, интерполировать значения между входными выборками с действительным знаком с помощью линейной интерполяции.
interp = dsp.Interpolator(Name,Value)interp, с каждым заданным набором свойств к заданному значению. Заключите каждое имя свойства в одинарные кавычки.
interpOut = interp(input)interpOut, из входного вектора или матричного input, как задано в свойстве InterpolationPoints. Каждый столбец input обработан как независимый канал входа.
interpOut = interp(input,ipts)ipts.
Чтобы задать точки интерполяции, установите свойство InterpolationPointsSource на 'Input port'.
t = 0:.0001:.0511; x = sin(2*pi*20*t); x1 = x(1:50:end); ipts = 1:0.1:length(x1); interp = dsp.Interpolator('InterpolationPointsSource','Input port'); interpOut = interp(x1',ipts');
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Примечание: Если вы используете R2016a или ранее, заменяете каждый вызов объекта с эквивалентным синтаксисом шага. Например, obj(x) становится step(obj,x).
x = [1 4]; x = repmat(x,1,4); x1 = 1:0.25:8; firInterp = dsp.Interpolator('Method','FIR','FilterHalfLength',2,... 'InterpolationPoints',x1','InterpolationPointsPerSample',4); linInterp = dsp.Interpolator('InterpolationPoints',x1'); OutFIR = firInterp(x'); OutLin = linInterp(x'); stem(OutFIR,'b-.','linewidth',2); hold on; stem(OutLin,'r','markerfacecolor',[1 0 0]); axis([0 30 0 5]); legend('FIR','Linear','Location','Northeast');

Точки интерполяции в индексах 1 - 5 и 25 - 29 не имеют достаточных выборок с низкой ставкой, окружающих их, чтобы использовать КИХ-интерполяцию с заданной длиной фильтра. Поэтому объект интерполятора использует линейную интерполяцию вместо этого.
Примечание: Если вы используете R2016a или ранее, заменяете каждый вызов объекта с эквивалентным синтаксисом шага. Например, obj(x) становится step(obj,x).
t = 0:.0001:.0511; x = sin(2*pi*20*t); x1 = x(1:50:end); I = 1:0.1:length(x1); interp = dsp.Interpolator('InterpolationPointsSource',... 'Input port'); y = interp(x1',I'); stem(I',y, 'r'); title('Original and Interpolated Signal'); hold on; stem(x1, 'Linewidth', 2); legend('Interpolated','Original');

Примечание: Если вы используете R2016a или ранее, заменяете каждый вызов объекта с эквивалентным синтаксисом шага. Например, obj(x) становится step(obj,x).
Интерполируйте сумму синусоид с КИХ-интерполяцией, и с 'Input port' как источник точек интерполяции.
Fs = 1000; t = 0:(1/Fs):0.1-(1/Fs); x = cos(2*pi*50*t)+0.5*sin(2*pi*100*t); x1 = x(1:4:end); I = 1:(1/4):length(x1); interp = dsp.Interpolator('Method','FIR',... 'FilterHalfLength',3,'InterpolationPointsSource','Input Port'); y = interp(x1',I'); stem(I,y,'r'); hold on; axis([0 25 -2 2]); stem(x1,'b','linewidth',2); legend('Interpolated Signal','Original',... 'Location','Northeast');

Примечание: Если вы используете R2016a или ранее, заменяете каждый вызов объекта с эквивалентным step синтаксис. Например, obj(x) становится step(obj,x).
dsp.Interpolator объект с Method набор свойств к 'FIR' моделирует многофазный КИХ-Интерполятор. Многофазная реализация разделяет КИХ-импульсную характеристику фильтра lowpass в несколько подфильтров. Каждый подфильтр занимает определенный узкий диапазон частот. В этом примере показано, как определить многофазные подфильтры.
Фактор повышающей дискретизации значения по умолчанию и значение по умолчанию, многофазное поясной, равняются 3. Используя эти значения, спроектируйте КИХ-фильтр линейной фазы при помощи intfilt функция. Возвращенный фильтр имеет длину 2 * P * L-1, где P является фактором повышающей дискретизации, и L является фильтром половина длины.
interp = dsp.Interpolator('Method','FIR'); L = interp.InterpolationPointsPerSample; P = interp.FilterHalfLength; FiltCoeffs = intfilt(L,P,interp.Bandwidth); FiltLen=length(FiltCoeffs); FiltCols = ceil(FiltLen/2/L);
Фильтру нужно 2*P*L коэффициенты. Предварительно ожидая нуль не влияет на величину фильтра.
FiltCoeffs = [zeros(FiltCols*2*L-FiltLen,1); FiltCoeffs(:)];
Каждый столбец PolyPhaseCoeffs многофазный подфильтр.
PolyPhaseCoeffs = reshape(FiltCoeffs,FiltCols,2*L)';
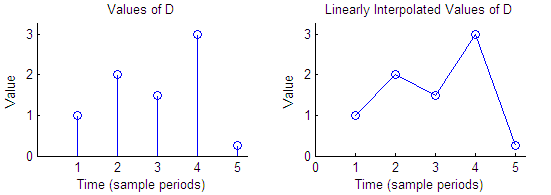
В режиме линейной интерполяции алгоритм интерполирует значения данных путем предположения, что данные варьируются линейно между выборками, взятыми в смежных шагах расчета.
Предположим, что входным сигналом является D = [1 2 1.5 3 0.25]' . Левый график показывает выборки в D и правильный график показывает линейно интерполированные значения между выборками в D.
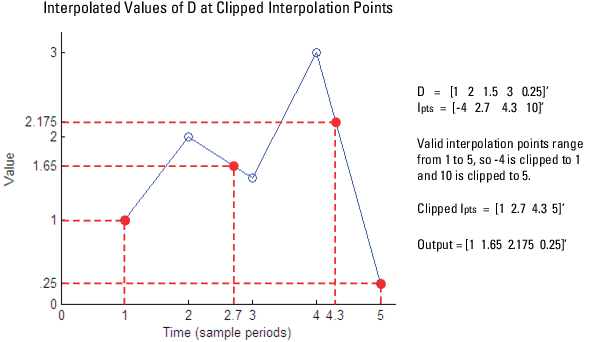
Когда точки интерполяции вне области значений, алгоритм отсекает недопустимые точки интерполяции. Рассмотрите входной сигнал, D = [1 2 1.5 3 0.25]' , и вектор интерполяции, IPts = [-4 2.7 4.3 10]'. Интерполированный выход дан [1 1.65 2.175 0.25]'.
dsp.CICCompensationInterpolator | dsp.CICInterpolator | dsp.FIRHalfbandInterpolator | dsp.FIRInterpolator | dsp.IIRHalfbandInterpolator | dsp.VariableFractionalDelay