Создайте постоянную угловую скорость вращения прямоугольный целевой gmphd фильтр
phd = initctrectgmphd(detections)gmphd отфильтруйте на основе информации, предоставленной в обнаружениях объектов, detections. Функция инициализирует постоянную угловую скорость вращения прямоугольное состояние тем же соглашением как ctrect и ctrectmeasx, y ; s; θ; ω; L; W. См. Алгоритмы для значения этих переменных.
.
Эта функция инициализации не совместима с trackerGNN, trackerJPDA, и trackerTOMHT Системные объекты.
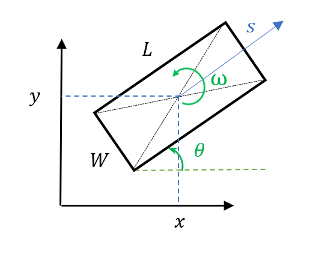
Прямоугольное целевое состояние содержит [x; y; s;; ω; L; W:
| Переменная | Значение | Модуль |
| x | Положение прямоугольника сосредотачивается в направлении x | m |
| y | Положение прямоугольника сосредотачивается в направлении y | m |
| s | Скорость в направляющемся направлении | m/s |
| θ | Угол ориентации прямоугольника относительно направления x | градус |
| ω | Угловая скорость вращения | degree/s |
| L | Длина прямоугольника | m |
| W | Ширина прямоугольника | m |
ctrect | ctrectcorners | ctrectjac | ctrectmeas | ctrectmeasjac | gmphd | initcagmphd | initctgmphd | initctrectgmphd | trackerPHD
