В физическом оборудовании моторное текущее чтение датчиками тока фильтруется и масштабируется к ADC измеримая область значений. Периферийное устройство ADC в процессоре читает текущие сигналы и выводит ADC, значит текущий алгоритм управления. Этот рисунок показывает пример того, как можно смоделировать моторную фазу текущее обнаружение и алгоритмы создания условий сигнала.
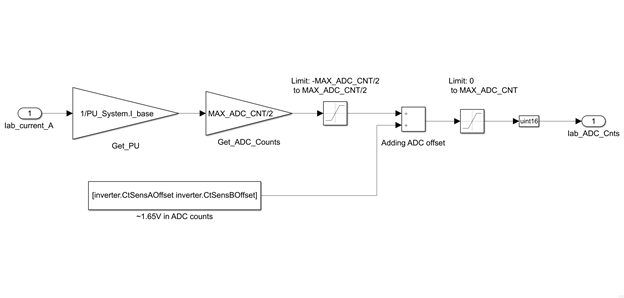
Максимальный измеримый максимальный ток рассматривается как основной ток. Количества ADC могут быть вычислены от основных текущих, полномасштабных значений ADC, наряду со смещением ADC, при помощи этого уравнения:
Для инвертора по умолчанию и сигнала, обусловливающего параметры схемы для коммерчески доступных инверторов, смотрите mcb_SetInverterParameters.m файл. Чтобы добавить новую настройку инвертора, создайте тип инвертора в этом файле и используйте это в скрипте инициализации модели для инициализации параметра. Если вы используете фильтры lowpass в измерении тока, добавьте среднюю модель, чтобы отфильтровать ток.
