Cone Clutch
Муфта сцепления с коническими пластинами, которые участвуют, когда нормальная сила превышает порог
Описание
Блок Cone Clutch представляет муфту сцепления с коническим интерфейсом контакта. Конический интерфейс уменьшает нормальную силу, требуемую для обязательства муфты путем создания действия втискивания между компонентами муфты, конусом и чашкой. Конические приложения муфты включают коробки передач синхронизатора, которые синхронизируют диск и управляемые скорости вала, чтобы включить более сглаженное обязательство между механизмами передачи.
Компонент чашки соединяется жёстко с карданным валом, вращающимся с ним как модуль. Конический компонент соединяется жёстко с управляемым валом, который находится в осевом выравнивании с карданным валом. Муфта участвует, когда конические слайды к чашке и нажимают плотно против ее внутренней поверхности. Трение в интерфейсе контакта конической чашки позволяет муфте передать вращательную степень между диском и управляемыми валами. Модель трения этого блока включает и статические и кинетические вклады трения, последний которых приводит к рассеиванию энергии во время промаха между компонентами чашки и конусом.
Блок Cone Clutch основан на блоке Fundamental Friction Clutch. Для полной модели муфты сцепления смотрите Fundamental Friction Clutch. В этом разделе рассматриваются специализированную модель, реализованную в блоке Cone Clutch.
Когда вы прикладываете нормальную силу, FN, блок Cone Clutch может применить два вида трения, кинетического и статического, к движению автомобильной трансмиссии. Муфта применяет кинетический момент трения только, когда одна ось автомобильной трансмиссии вращается относительно другой оси автомобильной трансмиссии. Муфта применяет статический момент трения, когда две блокировки осей автомобильной трансмиссии и вращаются вместе. Блок выполняет итерации посредством многоступенчатого тестирования, чтобы определить, когда заблокировать и разблокировать муфту.
Сожмите геометрию и переменные
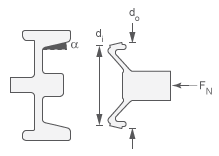
Рисунок показывает коническую геометрию муфты.
Сожмите переменные
| Параметр | Определение | Значение |
|---|
| d o | Наружный диаметр конической поверхности контакта | Смотрите предыдущую фигуру |
| d i | Внутренний диаметр конической поверхности контакта | Смотрите предыдущую фигуру |
| α | Коническая половина угла | Смотрите предыдущую фигуру |
| ω | Относительная скорость вращения (промах) | ω F – ω B |
| ω Tol | Подсуньте допуск к блокировке муфты | См. следующую модель |
| F N | Нормальная сила применилась к коническим поверхностям | Нормальная прикладывавшая сила, если больше, чем порог: F N> F th |
| α | Конический полуугол | Смотрите предыдущую фигуру |
| Эффективность r | Эффективный радиус крутящего момента | Эффективная рука момента силы трения муфты |
| k K | Кинетический коэффициент трения | Безразмерный коэффициент кинетического трения конических поверхностей трения. Функция ω. |
| k S | Статический коэффициент трения | Безразмерный коэффициент статического трения конических поверхностей трения. |
| τ K | Кинетический момент трения | См. следующую модель |
| τ S | Статический предел момента трения | (статическое трение достигает максимума фактор), · (кинетический момент трения для ω → 0)
(См. следующую модель), |
Отношение к основной муфте сцепления
Блок Cone Clutch основан на блоке Fundamental Friction Clutch. Вместо того, чтобы требовать кинетических и статических предельных крутящих моментов трения как входных сигналов, блок Cone Clutch вычисляет кинетическое и статическое трение от параметров муфты и входа, нормальная сила сигнализирует о FN.
Кинетическое трение
Кинетический момент трения является продуктом четырех факторов:
Кинетический момент трения выступает против относительного промаха и применяется с полным знаком "минус". Это изменяет знак, когда ω изменяет знак.
Вы задаете кинетический коэффициент трения, kK, или как константа или как сведенная в таблицу дискретная функция относительной скорости вращения, ω. Сведенная в таблицу функция принята, чтобы быть симметричной для положительных и отрицательных величин относительной скорости вращения. Поэтому задайте k K для положительных значений ω только.
Эффективный радиус крутящего момента, reff, является эффективным радиусом, измеренным от оси автомобильной трансмиссии, в которой кинетические силы трения прикладываются во фрикционных поверхностях. Это связано с геометрией конической геометрии поверхности трения:
do и di являются максимумом поверхности контакта и минимальными диаметрами, соответственно.
Статическое трение
Статический предел трения связан с кинетическим трением, установкой ω, чтобы обнулить и заменяющий кинетическое на статический коэффициент трения:
k S> k K, так, чтобы крутящий момент, τ, необходимый через муфту, чтобы разблокировать его путем преодоления статического трения, были больше, чем кинетическое трение в момент разблокирования, когда ω = 0.
Статический предел трения задает симметричные статические пределы момента трения как:
Область значений [τ S–, τ S +] используется Основной Муфтой сцепления.
Обязательство и условия блокировки
Муфта участвует (крутящий момент передач), когда конические поверхности трения подвергаются положительной нормальной силе и генерируют кинетическое трение: F N> 0 и τK> 0.
Муфта блокирует, если и только если она занята, и промах меньше скоростного допуска: |ω | <ω Tol.
Степень, рассеянная муфтой
Степень, рассеянная муфтой, является |ω · τK |. Муфта рассеивает степень, только если это оба уменьшается (ω ≠ 0) и применяет кинетическое трение (τK> 0).
Зависимая скоростью модель
Можно смоделировать эффекты вращательного изменения скорости путем выбора зависимой скоростью модели. Чтобы выбрать зависимую скоростью модель, в настройках Friction, устанавливают параметр Friction model на Velocity-dependent kinetic friction coefficient. Для получения информации о модели трения, которая зависит и от скорости и от температуры, см. Тепловую, Зависимую Скоростью Модель.
Поскольку скоростной зависимый моделирует эти связанные параметры, становятся видимыми в настройках Friction:
Relative velocity vector
Kinetic friction coefficient vector
Friction coefficient interpolation method
Friction coefficient extrapolation method
Тепловая модель
Можно смоделировать эффекты теплового потока и изменения температуры путем выбора температурно-зависимой модели. Чтобы выбрать температурно-зависимую модель, в настройках Friction, устанавливают параметр Friction model на Temperature-dependent friction coefficients. Для получения информации о модели трения, которая зависит и от скорости и от температуры, см. Тепловую, Зависимую Скоростью Модель.
Для температурно-зависимой модели отображаются тепловой порт H и эти настройки:
Тепловая, зависимая скоростью модель
Можно смоделировать эффекты вращательного изменения скорости и теплового потока путем выбора зависимой скоростью и температурно-зависимой модели. Чтобы выбрать модель, которая зависит и от скорости и от температуры в настройках Friction, устанавливает параметр Friction model на Temperature and velocity-dependent friction coefficients.
Для зависимой скоростью и температурно-зависимой модели тепловой порт H и эти связанные настройки и параметры становятся видимыми:
Порты
Входной параметр
развернуть все
N — Нормальная сила
физический сигнал
Порт физического сигнала сопоставлен с нормальной силой. Этот сигнал положителен или нуль. Сигнал меньше, чем нуля интерпретирован как нуль.
Зависимости
Этот порт отображается, только если в настройках Geometry параметр Shift linkage control устанавливается на Physical signal. Для получения дополнительной информации смотрите управление рычажным устройством Сдвига и Зависимости от Параметра Геометрии.
Сохранение
развернуть все
B — Основа
вращательное механическое устройство
Порт сохранения вращательного механического устройства сопоставлен с ведущим (основным) валом. Движение муфты измеряется как промах
ω = ωF – ωB, скорость вращения последователя относительно основы.
F — Последователь
вращательное механическое устройство
Порт сохранения вращательного механического устройства сопоставлен с валом последователя или управляемым
H — Тепловой поток
тепловой
Тепловой порт сохранения сопоставлен с тепловым потоком.
Зависимости
Этот порт отображается только, когда в настройках Friction параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации см. модель Friction и Зависимости от Параметра Трения.
S — Переключите рычажное устройство
вращательное механическое устройство
Порт сохранения вращательного механического устройства сопоставлен с рычажным устройством сдвига.
Зависимости
Этот порт отображается только, когда в настройках параметр Shift linkage control устанавливается на Conserving port. Для получения дополнительной информации смотрите управление рычажным устройством Сдвига и Зависимости от Параметра Геометрии.
Параметры
развернуть все
Геометрия
Таблица показывает, как видимость некоторых параметров зависит от опции, которую вы выбираете для других параметров. Чтобы изучить, как считать таблицу, смотрите Зависимости от Параметра.
Зависимости от параметра геометрии
| Geometry |
|---|
| Contact surface maximum diameter |
| Contact surface minimum diameter |
| Cone half angle |
| Shift linkage control
|
Physical signal | Conserving port |
Отсоединяет входной порт физического сигнала N | Отсоединяет:
|
Contact surface maximum diameter — Наружный диаметр
150 mm (значение по умолчанию) | положительная скалярная величина
Внешний конический диаметр do.
Contact surface minimum diameter — Внутренний диаметр
100 mm (значение по умолчанию) | положительная скалярная величина
Внутренний конический диаметр di.
Cone half angle — Коническая половина угла
12 deg (значение по умолчанию) | положительная скалярная величина
Наполовину вводный угол α конической геометрии.
Shift linkage control — Переключите модель рычажного устройства
Physical signal (значение по умолчанию) | Conserving port
Модель управления рычажного устройства сдвига:
Physical signal — Отсоедините порты N физического сигнала, который вводит нормальную силу и X, который перемещаются выходные параметры для рычажного устройства сдвига.
Conserving port — Осушите порт сохранения, S, который сопоставлен с управлением рычажным устройством сдвига.
Зависимости
Видимость настроек Shift Linkage и портов S, X и N зависит от этой установки. Для получения дополнительной информации смотрите Зависимости от Параметра Геометрии.
Переключите рычажное устройство
Эти настройки отображаются, только если в настройках Geometry параметр Shift linkage control устанавливается на Conserving port. Для получения дополнительной информации смотрите управление рычажным устройством Сдвига и Зависимости от Параметра Геометрии.
Hard stop at back of shift linkage — Жесткий упор
On (значение по умолчанию) | Off
Жесткий упор в задней части рычажного устройства сдвига
Ring-hub clearance when disengaged — Разрешение кольцевого концентратора
3 mm (значение по умолчанию) | неотрицательный скаляр
Разрешение кольцевого концентратора, когда расцеплено
Ring stop stiffness — Кольцевая жесткость остановки
10e5
N/m (значение по умолчанию) | неотрицательный скаляр
Звонок останавливает жесткость
Ring stop damping — Кольцевое затухание остановки
1e3
N/(m/s) (значение по умолчанию) | неотрицательный скаляр
Кольцевое затухание остановки
Shift linkage viscous friction coefficient — Переключите рычажное устройство вязкое трение
100 N/(m/s) (значение по умолчанию) | положительная скалярная величина
Переключите коэффициент вязкого трения рычажного устройства
Linkage travel direction — Направление перемещения разъединения
Positive shift linkage displacement engages clutch (значение по умолчанию) | Negative shift linkage displacement engages clutch
Направление перемещения рычажного устройства, которое выключает сцепление
Трение
Таблица показывает, как видимость некоторых портов, параметров и настроек зависит от опции, которую вы выбираете для других параметров. Чтобы изучить, как считать таблицу, смотрите Зависимости от Параметра.
Зависимости от параметра трения
| Friction |
|---|
| Friction model |
Fixed kinetic friction coefficient | Velocity-dependent kinetic friction coefficient | Temperature-dependent friction coefficients | Temperature and velocity-dependent friction coefficients |
Отсоединяет:
| Отсоединяет:
|
| - | - | Temperature vector | Temperature vector |
| - | Relative velocity vector | - | Relative velocity vector |
| Static friction coefficient | Static friction coefficient | Static friction coefficient vector | Static friction coefficient vector |
| Kinetic friction coefficient | Kinetic friction coefficient vector | Kinetic friction coefficient vector | Kinetic friction coefficient matrix |
| - | Friction coefficient interpolation method | Friction coefficient interpolation method | Friction coefficient interpolation method |
| - | Friction coefficient extrapolation method | Friction coefficient extrapolation method | Friction coefficient extrapolation method |
| Velocity tolerance | Velocity tolerance | Velocity tolerance | Velocity tolerance |
| Threshold force | Threshold force | Threshold force | Threshold force |
| Viscous drag torque coefficient | Viscous drag torque coefficient | Viscous drag torque coefficient | Viscous drag torque coefficient |
Friction model — Модель Friction
Fixed kinetic friction coefficient (значение по умолчанию) | Velocity-dependent kinetic friction coefficient | Temperature-dependent friction coefficients | Temperature and velocity-dependent friction coefficients
Метод параметризации, чтобы смоделировать кинетический коэффициент трения. Опции и значения по умолчанию для этого параметра зависят от модели трения, которую вы выбираете для блока. Опции:
Fixed kinetic friction coefficient — Введите фиксированное значение для кинетического коэффициента трения.
Velocity-dependent kinetic friction coefficient — Задайте кинетический коэффициент трения одномерным поиском по таблице на основе относительной скорости вращения между дисками.
Temperature-dependent friction coefficients — Задайте кинетический коэффициент трения поиском по таблице на основе температуры.
Temperature and velocity-dependent friction coefficients — Задайте кинетический коэффициент трения поиском по таблице на основе температуры и относительной скорости вращения между дисками.
Зависимости
Установка модели трения влияет на видимость других параметров, настроек и портов. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Relative velocity vector — Относительная скорость
[0, 100, 1000] rad/s (значение по умолчанию) | вектор
Входные значения для относительной скорости как вектор. Значения в векторе должны увеличиться слева направо. Минимальное количество значений зависит от метода интерполяции, который вы выбираете. Для линейной интерполяции введите по крайней мере два значения на размерность. Для сплайн-интерполяции введите по крайней мере три значения на размерность.
Зависимости
Этот параметр отображается только, когда параметр Friction model устанавливается на Velocity-dependent kinetic friction coefficient или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Temperature vector — Температура
[280, 300, 320] K (значение по умолчанию) | увеличивающийся вектор
Входные значения для температуры как вектор. Минимальное количество значений зависит от метода интерполяции, который вы выбираете. Для линейной интерполяции введите по крайней мере два значения на размерность. Для сплайн-интерполяции введите по крайней мере три значения на размерность. Значения в векторе должны увеличиться слева направо.
Зависимости
Этот параметр отображается только, когда параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Static friction coefficient — Статический коэффициент трения
0.35
Статическое или пиковое значение коэффициента трения. Статический коэффициент трения должен быть больше кинетического коэффициента трения.
Зависимости
этот параметр отображается только, когда параметр Friction model устанавливается на Fixed kinetic friction coefficient или Velocity-dependent kinetic friction coefficient. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Static friction coefficient vector — Статический коэффициент трения
[.4, .38, .36]
Статические, или пиковые, значения коэффициента трения как вектор. Вектор должен иметь то же число элементов как температурный вектор. Каждое значение должно быть больше значения соответствующего элемента в кинетическом векторе коэффициентов трения.
Зависимости
Этот параметр отображается только, когда параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Kinetic friction coefficient — Кинетический коэффициент трения
0.3
Кинетический, или кулонов, коэффициент трения. Коэффициент должен быть больше нуля.
Зависимости
Этот параметр отображается только, когда параметр Friction model устанавливается на Fixed kinetic friction coefficient. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Kinetic friction coefficient vector — Кинетический коэффициент трения
[.3, .22, .19] [.3, .28, .25] | вектор
Выходные значения для кинетического коэффициента трения как вектор. Все значения должны быть больше нуля.
Если параметр Friction model устанавливается на
Velocity-dependent kinetic friction coefficient — Вектор должен иметь то же число элементов как относительный вектор скорости.
Temperature-dependent friction coefficients — Вектор должен иметь то же число элементов как температурный вектор.
Зависимости
Этот параметр отображается только, когда параметр Friction model устанавливается на Velocity-dependent kinetic friction coefficient или Temperature-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Kinetic friction coefficient matrix — Кинетический коэффициент трения
[.34, .32, .3; .3, .28, .25; .25, .2, .15]
Выходные значения для кинетического коэффициента трения как матрица. Все значения должны быть больше нуля. Размер матрицы должен равняться размеру матрицы, которая является результатом температурного вектора × кинетический содействующий вектор скорости родственника трения.
Зависимости
Этот параметр отображается только, когда параметр Friction model устанавливается на Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Friction coefficient interpolation method метод интерполяции
Linear (значение по умолчанию) | Smooth
Метод интерполяции для аппроксимации выходного значения, когда входное значение между двумя последовательными узлами решетки:
Linear — Выберите эту опцию, чтобы получить лучшую производительность.
Smooth — Выберите эту опцию, чтобы произвести непрерывную кривую с непрерывными производными первого порядка.
Для получения дополнительной информации об алгоритмах интерполяции смотрите страницу с описанием блока PS Lookup Table (1D).
Зависимости
Этот параметр отображается только, когда параметр Friction model устанавливается на Velocity-dependent kinetic friction coefficient, Temperature-dependent friction coefficients, или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Friction coefficient extrapolation method ExtrapolationMethod
Linear (значение по умолчанию) | Nearest | Error
Метод экстраполяции для определения выходного значения, когда входное значение находится вне диапазона, указанного в списке аргументов:
Linear — Выберите эту опцию, чтобы произвести линию, соединяющую соседние значения в области экстраполяции и за пределами с областью интерполяции.
Nearest — Выберите эту опцию, чтобы произвести экстраполяцию, которая не выше самой высокой или ниже самой низкой точки в области данных.
Error — Выберите эту опцию, чтобы не входить в режим экстраполяции, когда это необходимо, ваши данные, чтобы быть в табличной области значений. Если входной сигнал находится вне области значений таблицы, симуляция останавливает и генерирует ошибку.
Для получения дополнительной информации об алгоритмах экстраполяции смотрите страницу с описанием блока PS Lookup Table (1D).
Зависимости
Этот параметр отображается только, когда параметр Friction model устанавливается на Velocity-dependent kinetic friction coefficient, Temperature-dependent friction coefficients, или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Velocity tolerance — Относительный скоростной порог блокировки
0.001 rad/s (значение по умолчанию) | скаляр
Относительная скорость, ниже которой две поверхности могут заблокировать. Поверхности блокируют, если крутящий момент через B и F вращательные порты меньше продукта эффективного радиуса, статического коэффициента трения и прикладывавшей нормальной силы.
Threshold force — Нормальный порог силы контакта
1 N (значение по умолчанию) | скаляр
Нормальная сила применилась к порту N физического сигнала, применяется к контакту, только если сумма силы превышает значение параметра Threshold force. Силы ниже Threshold force не прикладываются, таким образом, нет никакого переданного фрикционного крутящего момента.
Viscous drag torque coefficient — Вязкий момент сопротивления
0
Вязкий коэффициент момента сопротивления.
Начальные условия
Initial state — Начальное состояние муфты
Unlocked (значение по умолчанию) | Locked
Состояние муфты в начале симуляции. Муфта может быть в одном из двух состояний, заблокированных и разблокированных. Заблокированная муфта ограничивает основу и валы последователя вращаться при той же скорости, то есть, как единый блок. Разблокированная муфта позволяет этим двум валам вращаться при различных скоростях, приводящих к промаху между пластинами муфты.
Тепловой порт
Настройки Thermal Port отображаются только, когда в настройках Friction параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Thermal mass — Количество тепла
50 kJ/K (значение по умолчанию) | скаляр
Тепловая энергия, требуемая изменить температуру компонента одной степенью. Чем больше количество тепла, тем более стойкий компонент к изменению температуры.
Зависимости
Этот параметр только отображается, когда в настройках Friction параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Initial temperature — Начальная температура
300 K (значение по умолчанию) | скаляр
Температура компонента в начале симуляции. Начальная температура изменяет КПД компонента согласно вектору КПД, который вы задаете, влияя на запутывающий запуск или потери на трение.
Зависимости
Этот параметр только отображается, когда в настройках Friction параметр Friction model устанавливается на Temperature-dependent friction coefficients или Temperature and velocity-dependent friction coefficients. Для получения дополнительной информации смотрите Зависимости от Параметра Трения.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью MATLAB® Coder™.
Введенный в R2011a