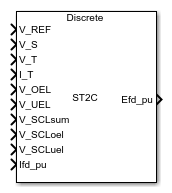
SM ST2C
Дискретное время или непрерывное время синхронная машина ST2C статическая система возбуждения с автоматическим регулятором напряжения
Описание
Блок SM ST2C реализует синхронную машину тип ST2C статическая системная модель возбуждения в соответствии с IEEE 421.5-2016 [1].
Используйте этот блок, чтобы смоделировать управление и регулирование полевого напряжения синхронной машины.
Можно переключиться между непрерывными и дискретными реализациями блока при помощи параметра Sample time (-1 for inherited). Чтобы сконфигурировать интегратор в течение непрерывного времени, установите свойство Sample time (-1 for inherited) на 0. Чтобы сконфигурировать интегратор в течение дискретного времени, установите свойство Sample time (-1 for inherited) на положительное, ненулевое значение, или на -1 наследовать шаг расчета от восходящего блока.
Блок SM ST2C включает четыре главных компонента:
Текущий Компенсатор изменяет измеренное терминальное напряжение как функцию терминального тока.
Преобразователь Измерения Напряжения симулирует динамику терминального преобразователя напряжения с помощью фильтра lowpass.
Компонент Элементов управления Возбуждения сравнивает преобразователь напряжения выход с терминальной ссылкой напряжения, чтобы произвести ошибку напряжения. Эта ошибка напряжения затем передается через регулятор напряжения, чтобы произвести полевое напряжение.
Модели Power Source источник питания для управляемого выпрямителя, когда это независимо от терминального напряжения.
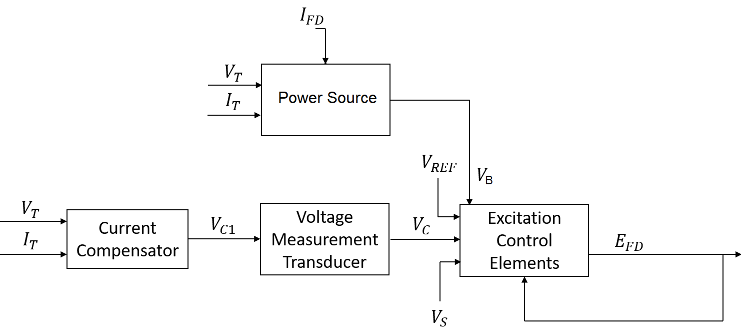
Эта схема показывает полную структуру системной модели возбуждения ST2C:
В схеме:
VT и IT являются измеренным терминальным напряжением и текущий из синхронной машины.
VC1 является компенсированным текущим образом терминальным напряжением.
VC является отфильтрованным, компенсированным текущим образом терминальным напряжением.
VREF является ссылочным терминальным напряжением.
VS является напряжением стабилизатора энергосистемы.
VB является полевым напряжением возбудителя.
EFD и IFD являются полевым напряжением и текущий, соответственно.
Следующие разделы описывают каждую из больших частей блока подробно.
Текущий преобразователь измерения компенсатора и напряжения
Текущий компенсатор моделируется как:
где:
Преобразователь измерения напряжения реализован как блок Low-Pass Filter с постоянной времени TR. Обратитесь к документации для блока Low-Pass Filter для дискретных и непрерывных реализаций.
Элементы управления возбуждения
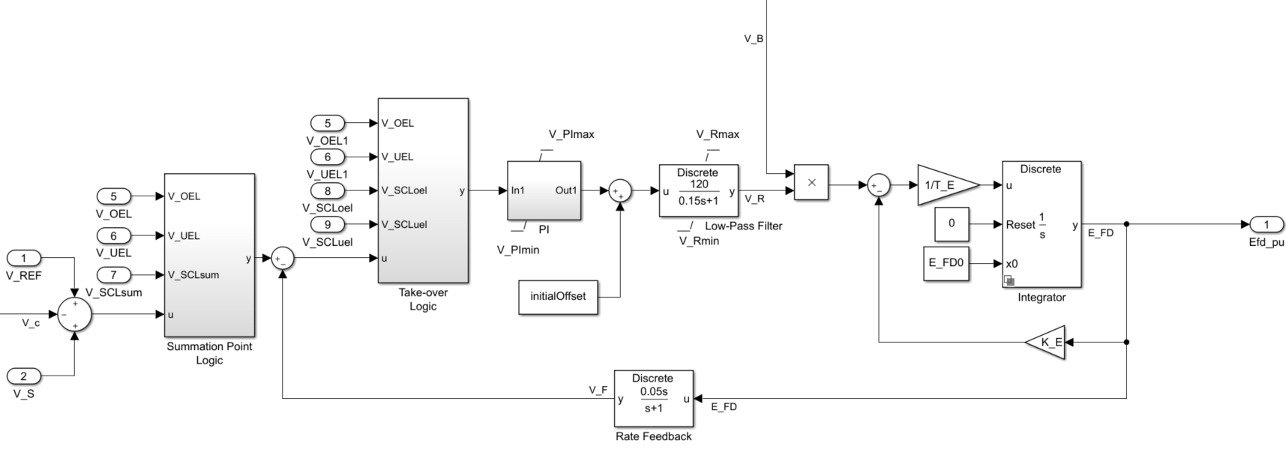
Эта схема иллюстрирует полную структуру элементов управления возбуждения:
В схеме:
Подсистема Логики Точки Суммирования моделирует входное местоположение точки суммирования для ограничителя перевозбуждения (OEL), ограничителя недовозбуждения (UEL), статора текущего ограничителя (SCL) и селектора выключателя питания (V_S) напряжения. Для получения дополнительной информации об использовании ограничителей с этим блоком смотрите Поле Текущие Ограничители.
Подсистема Логики Поглощения моделирует входное местоположение точки поглощения для OEL, UEL и напряжений SCL. Для получения дополнительной информации об использовании ограничителей с этим блоком смотрите Поле Текущие Ограничители.
Подсистема PI моделирует ПИ-контроллер эти функции как управляющая структура для автоматического регулятора напряжения и позволяет представление модификации оборудования с современным цифровым контроллером. Минимальными и максимальными антизаключительными пределами насыщения для блока является VPImin и VPImax, соответственно.
Блок Low-Pass Filter моделирует главную динамику регулятора напряжения. Здесь, KA является усилением регулятора, и TA является главной постоянной времени регулятора. Минимальными и максимальными антизаключительными пределами насыщения для блока является VRmin и VRmax, соответственно.
Блок Filtered Derivative моделирует путь к обратной связи уровня для стабилизации системы возбуждения. Здесь, KF и TF являются усилением и постоянной времени этой системы, соответственно. Обратитесь к документации для блока Filtered Derivative для точных дискретных и непрерывных реализаций.
Блок Integrator управляет возбудителем выход через управляемое насыщение. Параметр EFDmax представляет предел на напряжении возбудителя. Постоянная времени TE сопоставлена с индуктивностью обмоток управления.
Поле текущие ограничители
Можно использовать различное поле текущие ограничители, чтобы изменить выход регулятора напряжения под небезопасными условиями работы:
Используйте ограничитель перевозбуждения, чтобы предотвратить перегрев обмотки возбуждения из-за чрезмерной полевой текущей потребности.
Используйте ограничитель недовозбуждения, чтобы повысить полевое возбуждение, когда это слишком низко, который рискует десинхронизацией.
Используйте статор текущий ограничитель, чтобы предотвратить перегрев обмоток статора из-за сверхтоков.
Присоедините выход любого из этих ограничителей в одной из этих точек:
Точка суммирования как часть обратной связи автоматического регулятора напряжения (AVR)
Точка поглощения, чтобы заменить обычное поведение AVR
Если вы используете статор текущий ограничитель в точке суммирования, используйте один вход VSCLsum. Если вы используете статор текущий ограничитель в точке поглощения, используйте и вход перевозбуждения, VSCLoel, и вход недовозбуждения, VSCLuel.
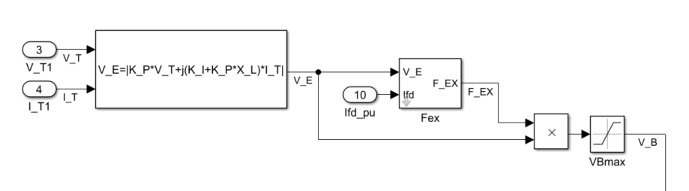
Источник питания
Некоторые статические системы используют и текущие источники и источники напряжения, чтобы сгенерировать источник питания.
Эта схема показывает модель источника питания возбудителя, использующего комбинацию фазовращателя терминального напряжения, VT, и терминального тока, IT:
Порты
Входной параметр
развернуть все
V_REF — Ссылка напряжения
скаляр
Точка множества элементарных исходов регулятора напряжения, в представлении на модуль в виде скаляра.
Типы данных: single | double
V_S — Введите от стабилизатора
скаляр
Введите от стабилизатора энергосистемы в представлении на модуль в виде скаляра.
Типы данных: single | double
V_T — Терминальное напряжение
скаляр
Терминальная величина напряжения в представлении на модуль в виде скаляра.
Типы данных: single | double
I_T — Терминальный ток
скаляр
Терминальная текущая величина в представлении на модуль в виде скаляра.
Типы данных: single | double
V_OEL — Предельный сигнал перевозбуждения
скаляр
Введите от ограничителя перевозбуждения в представлении на модуль в виде скаляра.
Зависимости
Чтобы проигнорировать вход от ограничителя перевозбуждения, установите Alternate OEL input locations (V_OEL) на Unused.
Чтобы использовать вход от ограничителя перевозбуждения в точке суммирования, установите Alternate OEL input locations (V_OEL) на Summation point.
Чтобы использовать вход от ограничителя перевозбуждения в точке поглощения, установите Alternate OEL input locations (V_OEL) на Take-over.
Типы данных: single | double
V_UEL — Предельный сигнал недовозбуждения
скаляр
Введите от ограничителя недовозбуждения в представлении на модуль в виде скаляра.
Зависимости
Чтобы проигнорировать вход от ограничителя недовозбуждения, установите Alternate UEL input locations (V_UEL) на Unused.
Чтобы использовать вход от ограничителя недовозбуждения в точке суммирования, установите Alternate UEL input locations (V_UEL) на Summation point.
Чтобы использовать вход от ограничителя недовозбуждения в точке поглощения, установите Alternate UEL input locations (V_UEL) на Take-over.
Типы данных: single | double
V_SCLsum — Статор точки суммирования текущий предельный сигнал
скаляр
Введите от статора текущий ограничитель при использовании точки суммирования в представлении на модуль в виде скаляра.
Зависимости
Чтобы проигнорировать вход от статора текущий ограничитель, установите Alternate SCL input locations (V_SCL) на Unused.
Чтобы использовать вход от статора текущий ограничитель в точке суммирования, установите Alternate SCL input locations (V_SCL) на Summation point.
Типы данных: single | double
V_SCLoel — Статор поглощения текущий предел (OEL)
скаляр
Введите от статора текущий ограничитель, который предотвращает полевое перевозбуждение при использовании точки поглощения в представлении на модуль в виде скаляра.
Зависимости
Чтобы проигнорировать вход от статора текущий ограничитель, установите Alternate SCL input locations (V_SCL) на Unused.
Чтобы использовать вход от статора текущий ограничитель в точке поглощения, установите Alternate SCL input locations (V_SCL) на Take-over.
Типы данных: single | double
V_SCLuel — Статор поглощения текущий предел (UEL)
скаляр
Введите от статора текущий ограничитель, который предотвращает полевое недовозбуждение при использовании точки поглощения в представлении на модуль в виде скаляра.
Зависимости
Чтобы проигнорировать вход от статора текущий ограничитель, установите Alternate SCL input locations (V_SCL) на Unused.
Чтобы использовать вход от статора текущий ограничитель в точке поглощения, установите Alternate SCL input locations (V_SCL) на Take-over.
Типы данных: single | double
Ifd_pu — Измеренное текущее поле
скаляр
Измеренное поле на модуль, текущее из синхронной машины.
Типы данных: single | double
Вывод
развернуть все
Efd_pu — Полевое напряжение
скаляр
Полевое напряжение на модуль к примениться к полевой схеме синхронной машины, возвращенной как скаляр.
Типы данных: single | double
Параметры
развернуть все
Общий
Initial field voltage, Efd0 (pu) — Начальное выходное напряжение
1
Начальное напряжение на модуль, чтобы примениться к полевой схеме синхронной машины.
Initial terminal voltage, Vt0 (pu) — Начальное терминальное напряжение
1
Начальное терминальное напряжение на модуль.
Initial terminal current, It0 (pu) — Начальный терминальный ток
1
Начальный терминальный ток на модуль.
Sample time (-1 for inherited) — Блокируйте шаг расчета
-1
Время между последовательным выполнением блока. Во время выполнения блок производит выходные параметры и, при необходимости обновляет его внутреннее состояние. Для получения дополнительной информации смотрите то, Что Шаг расчета? (Simulink) и Настройка времени выборки (Simulink).
Для наследованной операции дискретного времени задайте -1. Для операции дискретного времени задайте положительное целое число. Для операции непрерывного времени задайте 0.
Если этот блок находится в подсистеме маскированной, или другая различная подсистема, которая позволяет вам переключаться между непрерывной операцией и дискретной операцией, продвигает параметр шага расчета. Продвижение параметра шага расчета гарантирует правильное переключение между непрерывными и дискретными реализациями блока. Для получения дополнительной информации смотрите, Продвигают Параметр Маску (Simulink).
Предварительное управление
Resistive component of load compensation, R_C (pu) — Сопротивление компенсации
0
Сопротивление используется в текущей системе вознаграждения. Установите этот параметр и Reactance component of load compensation, X_C (pu) к 0 отключить текущую компенсацию.
Reactance component of load compensation, X_C (pu) — Реактивное сопротивление компенсации
0
Реактивное сопротивление используется в текущей системе вознаграждения. Установите этот параметр и Resistive component of load compensation, R_C (pu) к 0 отключить текущую компенсацию.
Regulator input filter time constant, T_R (s) — Постоянная времени регулятора
0
Эквивалентная постоянная времени для фильтрации преобразователя напряжения.
Управление
Voltage regulator proportional gain, K_PR (pu) — Регулятор пропорциональное усиление
1
Пропорциональное усиление сопоставлено с блоком управления PI регулятора напряжения.
Voltage regulator integral gain, K_IR (pu/s) — Усиление интеграла регулятора
0
Интегральное усиление сопоставлено с блоком управления PI регулятора напряжения.
Maximum voltage regulator output, V_PImax (pu) — Верхний предел regolator выводится для управления PI
99
Максимальное выходное напряжение на модуль блока управления PI регулятора.
Minimum voltage regulator output, V_PImin (pu) — Нижний предел regolator выводится для управления PI
-99
Минимальное выходное напряжение на модуль блока управления PI регулятора.
Voltage regulator gain, K_A (pu) — Усиление регулятора
120
Усиление сопоставлено с регулятором напряжения.
Voltage regulator time constant, T_A (s) — Постоянная времени регулятора
0.15
Главная постоянная времени регулятора напряжения.
Rate feedback gain, K_F (pu) — Усиление обратной связи уровня
0.05
Обратная связь уровня блокирует усиление.
Rate feedback time constant, T_F (s) — Постоянная времени обратной связи уровня
1
Обратная связь уровня блокирует постоянную времени.
Maximum regulator output, V_Rmax (pu) — Верхний предел регулятора выход
1
Максимальное выходное напряжение на модуль регулятора.
Minimum regulator output, V_Rmin (pu) — Нижний предел регулятора выход
0
Минимальное выходное напряжение на модуль регулятора.
Alternate OEL input locations (V_OEL) — Местоположение входа OEL
Unused (значение по умолчанию) | Summation point | Take-over
Ограничитель перевозбуждения ввел местоположение.
Alternate UEL input locations (V_UEL) — Местоположение входа UEL
Unused (значение по умолчанию) | Summation point | Take-over
Ограничитель недовозбуждения ввел местоположение.
Alternate SCL input locations (V_SCL) — Местоположение входа SCL
Unused (значение по умолчанию) | Summation point | Take-over
Статор текущий ограничитель ввел местоположение:
Если вы выбираете Summation point, используйте входной порт V_SCLsum.
Если вы выбираете Take-over, используйте входные порты V_SCLuel и V_SCLoel.
Возбудитель
Rectifier loading factor proportional to commutating reactance, K_C (pu) — Коэффициент загрузки выпрямителя
0.1
Коэффициент загрузки выпрямителя, пропорциональный коммутирующемуся реактивному сопротивлению.
Exciter field proportional constant, K_E (pu) — Усиление поля Exciter
1
Пропорциональная константа для поля возбудителя.
Exciter field time constant, T_E (s) — Постоянная времени поля Exciter
0.5
Постоянная времени для поля возбудителя.
Maximum generator field voltage, E_FDmax (pu) — Верхний предел полевого напряжения генератора
4.4
Максимальное полевое значение напряжения генератора на модуль.
Potential circuit (voltage) gain coefficient, K_P (pu) — Потенциальное напряжение схемы получает коэффициент
4.88
Коэффициент усиления напряжения на модуль в схеме источника питания.
Compound circuit (current) gain coefficient, K_I (pu) — Потенциальная схема текущий коэффициент усиления
0
На модуль текущий коэффициент усиления в схеме источника питания.
Reactance associated with potential source, X_L (pu) — Потенциальное исходное реактивное сопротивление
0
Реактивное сопротивление на модуль в схеме источника питания.
Potential circuit phase angle (degrees) — Потенциальный угол фазы схемы
0
Phase angle схемы источника питания, в градусах.
Maximum available exciter voltage, V_Bmax (pu) — Верхний предел напряжения возбудителя
5.2
Максимальное доступное значение напряжения возбудителя на модуль.
Ссылки
[1] Методические рекомендации IEEE для системных моделей возбуждения для исследований устойчивости энергосистемы. Станд. IEEE 421.5-2016. Пискатауэй, NJ: IEEE-SA, 2016.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Введенный в R2020a