Можно линеаризовать блок или подсистему в модели Simulink®, не задавая отдельные аналитические точки для вводов и выводов блока. Программное обеспечение изолирует выбранный блок из остальной части модели и вычисляет линейную модель блока от входных параметров блока до блока выходные параметры.
Линеаризация блока таким образом эквивалентна определению входа разомкнутого цикла и разомкнутого цикла выходные аналитические точки при вводах и выводах блока, соответственно. Для получения дополнительной информации об определении аналитических точек в вашей модели смотрите, Задают Фрагмент Модели, чтобы Линеаризовать.
В этом примере показано, как линеаризовать подсистему объекта в модели Simulink с помощью Model Linearizer.
Открытая модель Simulink.
mdl = 'watertank';
open_system(mdl)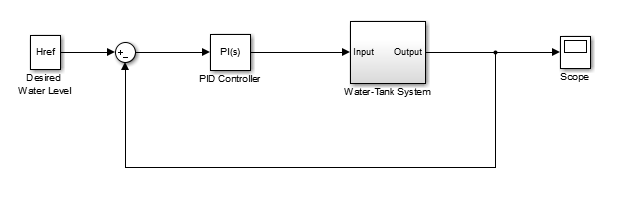
Для этой модели блок Water-Tank System содержит всю нелинейную динамику. Чтобы линеаризовать блок, используйте Model Linearizer.
Чтобы открыть Model Linearizer с вводами и выводами блока, выбранного как набор ввода-вывода линеаризации, откройте сначала вкладку Linearization. Для этого в окне модели Simulink, в галерее Apps, нажимают Linearization Manager.
В модели кликните по блоку Water-Tank System. Затем на вкладке Linearization нажмите Linearize Block.
В Model Linearizer, на вкладке Linear Analysis, в Analysis I/Os выпадающий список, программное обеспечение устанавливает набор ввода-вывода для линеаризации к Block: Water-Tank System.

В качестве альтернативы, если Model Linearizer уже открыт для вашей системы в окне модели Simulink, кликните по блоку Water-Tank System. Затем в Model Linearizer, в Analysis I/Os выпадающий список, выбирают Linearize the Currently Selected Block.
Когда заданный набор ввода-вывода линеаризации является блоком, можно подсветить блок в модели путем выбирания опции представления от Analysis I/Os выпадающий список. Например, чтобы подсветить блок Water-Tank System, выберите View Water-Tank System.
В данном примере используйте рабочую точку модели в линеаризации. Рабочая точка модели состоит из значений начального состояния и входных сигналов, сохраненных в модели. В Model Linearizer, на вкладке Linear Analysis, в Operating Point выпадающий список, Model Initial Condition отпуска выбранный. Для получения информации о линеаризации моделей в различных рабочих точках смотрите, Линеаризуют в Обрезанной Рабочей точке и Линеаризуют в Снимке состояния Симуляции.
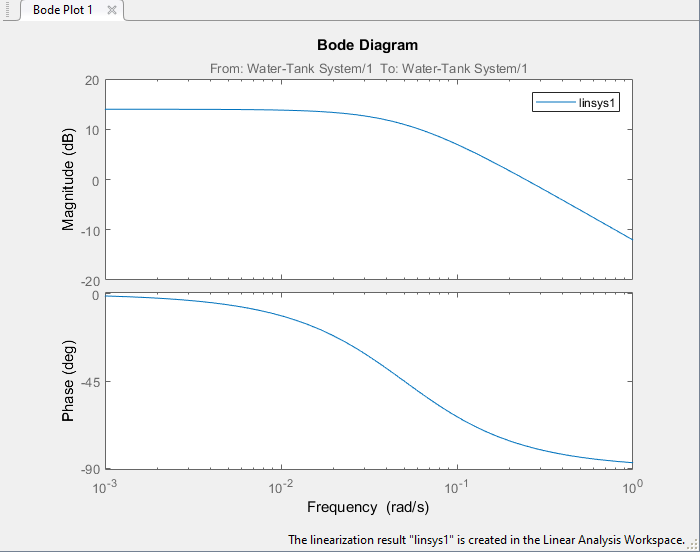
Чтобы линеаризовать заданный блок и сгенерировать Диаграмму Боде для получившейся линейной модели, нажмите![]() Bode.
Bode.
Программное обеспечение добавляет линеаризовавшую модель, linsys1, к Linear Analysis Workspace и генерирует Диаграмму Боде для модели.
Для получения дополнительной информации об анализе линейных моделей смотрите, Анализируют Результаты Используя Графики отклика Model Linearizer.
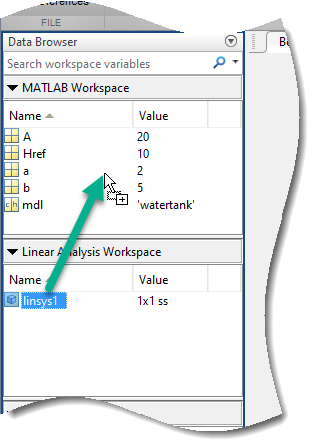
Можно также экспортировать линеаризовавшую модель в рабочую область MATLAB®. Для этого в Data Browser, перетащите linsys1 от Linear Analysis Workspace до MATLAB Workspace.
В этом примере показано, как линеаризовать подсистему объекта в модели Simulink® использование linearize команда.
Открытая модель Simulink.
mdl = 'watertank';
open_system(mdl)

Для этой системы блок Water-Tank System содержит всю нелинейную динамику. Чтобы линеаризовать эту подсистему, сначала задайте ее блок path.
blockpath = 'watertank/Water-Tank System';
Затем линеаризуйте подсистему объекта в рабочей точке модели.
linsys1 = linearize(mdl,blockpath);
Рабочая точка модели состоит из значений начального состояния и входных сигналов, сохраненных в модели. Для получения информации о линеаризации моделей в различных рабочих точках смотрите, Линеаризуют в Обрезанной Рабочей точке и Линеаризуют в Снимке состояния Симуляции.
Можно затем анализировать ответ линеаризовавшей модели. Например, постройте Предвещать ответ.
bode(linsys1)

Для получения дополнительной информации об анализе линейных моделей смотрите Линейный Анализ (Control System Toolbox).
