Боковой отслеживающий путь контроллер
Vehicle Dynamics Blockset / Сценарии Транспортного средства / Драйвер
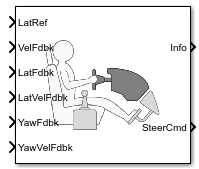
Реализации блока Lateral Driver оптимальный один предварительный просмотр точки (предусматривает) модель управления, чтобы сгенерировать нормированные держащиеся команды, которые отслеживают боковое ссылочное смещение. Нормированные руководящие команды могут варьироваться между-1 к 1. Чтобы смоделировать динамику, блок использует линейный одноколейный путь (велосипед) модель. Используйте блок Lateral Driver для:
Замкните круг между предопределенным путем и фактическим движением транспортного средства.
Сгенерируйте держащиеся команды, та дорожка предопределила пути. Можно соединить блок Predictive Driver выход с держащимися входными параметрами блока.
Кроме того, можно задать угловой предел насыщения колеса шины с помощью параметра Tire wheel angle limit, theta.
Используйте параметры External Actions, чтобы создать входные порты для сигналов, которые могут отключить, содержать или заменить руководящую команду с обратной связью. Блок использует этот порядок приоритетов во входных командах: отключите (самый высокий), содержите, переопределение. Блок использует этот порядок приоритетов во входных командах: отключите (самый высокий), содержите, переопределение.
Эта таблица суммирует параметры внешнего действия.
| Цель | Параметр внешнего действия | Input port | Тип данных |
|---|---|---|---|
Замените держащуюся команду с входной руководящей командой. | Steering override |
| Boolean |
| double | ||
Содержите держащуюся команду в текущем значении. | Steering hold | SteerHld | Boolean |
Отключите держащуюся команду. | Steering disable | SteerZero | Boolean |
Используйте параметр Output handwheel angle, чтобы задать модули для держащихся портов.
Установка | Блокируйте реализацию | Порт | |
|---|---|---|---|
| Управляемый регулируют угол, нормированный от-1 до 1. Блок использует угловой предел насыщения колеса шины параметр Tire wheel angle limit, theta, чтобы нормировать команду. |
| |
Заменяет держащуюся команду с входной руководящей командой, нормированной от-1 до 1. |
| ||
| Управляемый регулируют угол в рад. |
| |
Заменяет держащуюся команду с входной руководящей командой в рад. |
| ||
Реализации блока Lateral Driver оптимальный предварительный просмотр одно точки (предусматривают) модель управления, разработанную К. К. Макэдэм1, 2 года, 3. Модель представляет драйвер, регулирующий поведение управления во время следования траектории и маневров предотвращения препятствия. Предварительный просмотр драйверов (смотрит вперед), чтобы следовать за предопределенным путем. Реализовывать модель MacAdam, блок:
Представляет динамику как линейный одноколейный путь (велосипед) транспортное средство
Минимизирует предварительно просмотренный сигнал ошибки в одной точке T* секунды вперед вовремя
Счета на получение задержки драйвера из перцепционных и нейромускульных механизмов
Этот рисунок иллюстрирует реализацию блока версии одно точки модели драйвера.
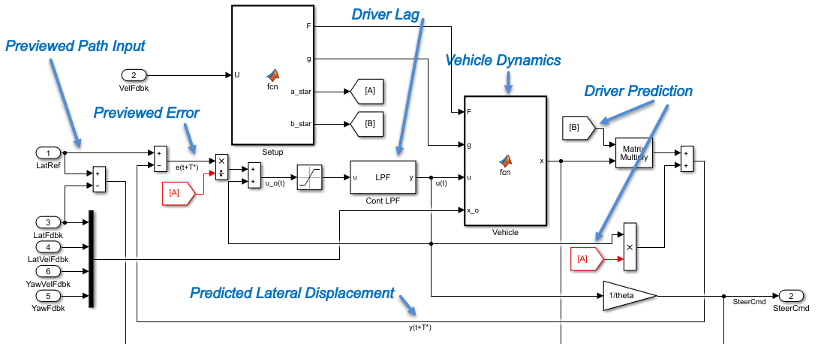
Для ответвления и движения отклонения от курса, блок реализует эти линейные динамические уравнения.
В матричном обозначении:
Модель одно точки принимает минимальный предварительно просмотренный сигнал ошибки в одной точке T* секунды вперед вовремя.* способность к драйверу предсказать будущий ответ транспортного средства на основе текущего руководящего входа управления. b* способность к драйверу предсказать будущий ответ транспортного средства на основе текущего состояния транспортного средства. Блок использует эти уравнения.
Уравнения используют эти переменные.
| a, B |
Передайте и назад утомите местоположение, соответственно |
| m |
Масса транспортного средства |
| I |
Транспортное средство вращательная инерция |
| CɑF |
Передний коэффициент движения на повороте шины |
| CɑR |
Коэффициент движения на повороте задней шины |
| a, B |
Скаляр предсказания драйвера и векторное усиление, соответственно |
| x |
Предсказанный вектор состояния транспортного средства |
| v | Боковая скорость |
| r |
Уровень отклонения от курса |
| Ψ |
Передний угол заголовка колеса |
| y |
Боковое смещение |
| F |
Системная матрица |
| δ, δF | Регулируйте угол, и передняя ось регулируют угол, соответственно |
| g |
Управляйте вектором коэффициентов |
| U | Передайте (продольную) скорость транспортного средства |
| T* |
Окно времени предварительного просмотра |
| ƒ(t+T*) |
Предварительно просмотренный вход path T* секунды вперед |
| U |
Передайте скорость транспортного средства |
| mT |
Постоянный вектор наблюдателя; обеспечивает положение ответвления транспортного средства |
Модель одно точки, реализованная блоком, находит держащуюся команду, которая минимизирует локальный индекс производительности, J, на текущем интервале предварительного просмотра, (t, t+T).
Чтобы минимизировать J относительно держащейся команды, это условие нужно соблюдать.
Можно выразить решение для оптимального управления в терминах текущей неоптимальной и соответствующей ненулевой ошибки на выходе предварительного просмотра секунды T* ahead1, 2, 3.
Блок использует расстояние предварительного просмотра и транспортное средство продольная скорость, чтобы определить окно времени предварительного просмотра.
Уравнения используют эти переменные.
| T* | Окно времени предварительного просмотра |
| ƒ(t+T*) | Предварительно просмотренный вход path секунда T* вперед |
| y(t+T*) | Предварительно просмотренный объект секунда выхода T* вперед |
| e(t+T*) | Предварительно просмотренный сигнал ошибки секунда T* вперед |
| u(t), uo(t) | Регулируйте угол, и оптимальный регулируют угол, соответственно |
| L | Расстояние предварительного просмотра |
| J | Индекс производительности |
| U | Передайте (продольную) скорость транспортного средства |
Модель одно точки, реализованная блоком, вводит задержку драйвера. Задержка драйвера составляет задержку, когда драйвер отслеживает задачи. А именно, это - транспортное получение задержки из перцепционных и нейромускульных механизмов. Чтобы вычислить транспортную задержку драйвера, блок реализует это уравнение.
Уравнения используют эти переменные.
| τ | Транспортная задержка драйвера |
| y(t+T*) | Предварительно просмотренный объект секунда выхода T* вперед |
| e(t+T*) | Предварительно просмотренный сигнал ошибки секунда T* вперед |
| u(t), uo(t) | Регулируйте угол, и оптимальный регулируют угол, соответственно |
| J | Индекс производительности |
[1] Щебеночное покрытие, C. C. "Оптимальное управление предварительным просмотром для линейных систем". Журнал динамических систем, измерения и управления. 102 (3), сентябрь 1980.
[2] Щебеночное покрытие, C. C. "Приложение оптимального управления предварительным просмотром для симуляции автомобильного управления с обратной связью". Транзакции IEEE в системах, человеке и кибернетике. Объем 11, выпуск 6, июнь 1981.
[3] Щебеночное покрытие, C. C. Разработка Драйвера/Транспортного средства, Регулирующего Модели Взаимодействия для Динамического анализа. Итоговый Технический отчет UMTRI-88-53. Научно-исследовательский институт Транспортировки Мичиганского университета. Декабрь 1988.
