Datastore для ограничительной рамки помечает данные
boxLabelDatastore объект создает datastore для данных о метке ограничительной рамки. Используйте этот объект считать помеченные данные об ограничительной рамке для обнаружения объектов.
Чтобы считать ограничительную рамку помечают данные из boxLabelDatastore объект, используйте read функция. Эта объектная функция возвращает массив ячеек с или двумя или тремя столбцами. Можно создать datastore, который комбинирует boxLabelDatastore объект с ImageDatastore объект с помощью combine объектная функция. Используйте объединенный datastore, чтобы обучить детекторы объектов с помощью учебных функций, таких как trainYOLOv2ObjectDetector и trainFasterRCNNObjectDetector. Можно получить доступ и управлять данными в функциях объекта использования datastore. Изменить ReadSize свойство, можно использовать запись через точку.
blds = boxLabelDatastore(tbl1,...,tbln)boxLabelDatastore объект из одной или нескольких таблиц, содержащих помеченные данные об ограничительной рамке.
tbl1,...,tbln — Помеченные данные об ограничительной рамке (в качестве отдельных аргументов)Помеченные данные об ограничительной рамке в виде таблицы с одним или несколькими столбцами. Ограничительные рамки могут быть выровненными осью прямоугольниками, вращаемыми прямоугольниками или кубоидами.
| Boundingbox | Формат | Описание |
|---|---|---|
| Выровненный осью прямоугольник | [xmin, ymin, width, height] | Заданный в пикселе координирует как M-by-4 матрица, представляющая ограничительные рамки M |
| Вращаемый прямоугольник | [xcenter, ycenter, width, height, yaw] | Заданный в пространственных координатах как M-by-5 матрица, представляющая ограничительные рамки M. [xcenter, ycenter] координаты представляют центр ограничительной рамки. [width, height] элементы представляют длину поля вдоль x и осей y, соответственно. yaw представляет угол поворота в градусах. Объем вращения вокруг центра ограничительной рамки измеряется в направлении по часовой стрелке. |
| Кубоид | [xcenter, ycenter, zcenter, width, height, depth, rx, ry, rz] | Заданный в пространственных координатах как M-by-9 матрица, представляющая ограничительные рамки M. [xcenter, ycenter, ycenter] координаты представляют центр ограничительной рамки. [width, height] элементы представляют длину поля вдоль x и осей y, соответственно. [rx, ry, rz] являются углами поворота, в градусах о центре кубоида. Вращение положительно в направлении по часовой стрелке относительно положительного направления оси. Матрицы вращения вычисляются, принимая, что ZYX заказывает Углы Эйлера [rx.ry, rz]. |
Учебная таблица может быть в одном из этих двух форматов.
Таблица с одним или несколькими столбцами:
Все столбцы содержат ограничительные рамки. Каждый столбец должен быть вектором ячейки, содержащим M-by-N матрицы. M является количеством изображений, и N представляет класс отдельного объекта, такой как stopSign, carRear или carFront.
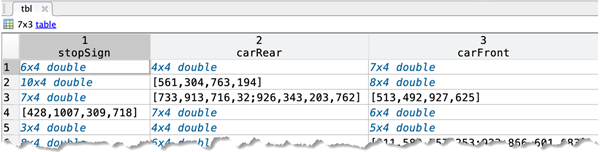
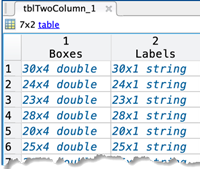
Таблица с двумя столбцами.
Первый столбец содержит ограничительные рамки. Второй столбец должен быть вектором ячейки, который содержит имена метки, соответствующие каждой ограничительной рамке. Каждым элементом в векторе ячейки должен быть M-by-1 категориальный или вектор строки, где M представляет количество меток.
Чтобы составить таблицу основной истины, используйте приложение Video Labeler или Image Labeler. Чтобы составить таблицу обучающих данных от сгенерированной основной истины, используйте objectDetectorTrainingData функция.
Типы данных: table
bSet — Блокируйте местоположенияblockLocationSet объектБлокируйте местоположения в виде blockLocationSet объект. Можно создать этот объект при помощи balanceBoxLabels функция.
combine | Объедините данные от нескольких datastores |
countEachLabel | Считайте вхождение меток поля или пикселя |
hasdata | Определите, доступны ли данные, чтобы читать из datastore |
numpartitions | Количество разделов для datastore |
partition | Разделите datastore метки |
preview | Считайте первую строку данных в datastore |
progress | Процент данных считан из datastore |
read | Считайте данные из datastore |
readall | Считывайте все данные в datastore |
reset | Сброс Datastore к начальному состоянию |
shuffle | Возвратите переставленную версию datastore |
subset | Создайте подмножество datastore или установленный на файл |
transform | Преобразуйте datastore |
isPartitionable | Определите, partitionable ли datastore |
isShuffleable | Определите, shuffleable ли datastore |
