Облако точек является набором точек в трехмерном пространстве. Облака точек обычно получаются из 3-D сканеров, таких как устройство Kinect® или лидар. У них есть приложения в навигации робота и восприятии, оценке глубины, видении стерео, визуальной регистрации, и в продвинутых системах помощи водителю (ADAS). Алгоритмы Computer Vision Toolbox™ обеспечивают функции, которые являются неотъемлемой частью рабочего процесса регистрации облака точек. Рабочий процесс включает использование функций облака точек pcmerge, pcdownsample, pctransform, и pcdenoise и несколько регистрационных функций pcregistericp, pcregistercpd, и pcregisterndt.
Регистрация облака точек является процессом выравнивания двух или больше 3-D облаков точек той же сцены. Это позволяет вам интегрировать 3-D данные из других источников в общую систему координат. Процесс регистрации может включать восстановление 3-D сцены из устройства Kinect, создавая карту шоссе для автомобилей и деформируемое отслеживание движения.
Процесс регистрации облака точек включает эти три шага.
Предварительная обработка — Удаляет шум или нежелательные объекты в каждом облаке точек. Downsample облака точек для более быстрой и более точной регистрации.
Регистрация — Регистр два или больше облака точек.
Выравнивание и сшивание — Опционально сшивают облака точек путем преобразования и слияния их.
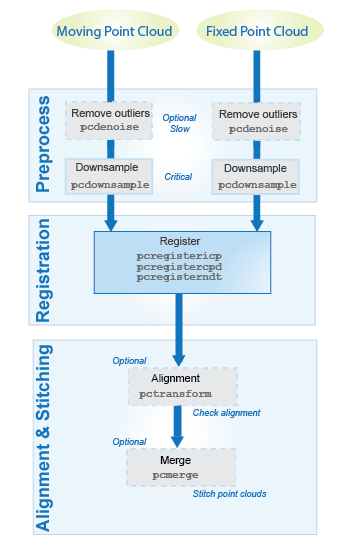
Можно использовать pcregistericp, pcregistercpd, или pcregisterndt функционируйте, чтобы указать движущееся облако точек к облаку фиксированной точки. Регистрационные алгоритмы, используемые этими функциями, основаны на алгоритме итеративной самой близкой точки (ICP), алгоритме когерентного дрейфа точки (CPD) и алгоритме нормальных распределений преобразовывают (NDT), соответственно. Для получения дополнительной информации об этих алгоритмах смотрите Ссылки.
При регистрации облака точек можно выбрать тип преобразования, которое представляет, как объекты в сцене изменяются между облаками точек.
| Преобразование | Описание |
|---|---|
| Твердый | Твердое преобразование сохраняет форму и размер объектов в сцене. Объекты в сцене могут подвергнуться переводам, вращениям или обоим. То же преобразование применяется ко всем точкам. |
| Аффинно | Аффинное преобразование позволяет объектам сдвинуть и изменить шкалу в дополнение к переводам и вращениям. |
| Нетвердый | Нетвердое преобразование позволяет форме объектов в сцене изменяться. Точки преобразовываются по-другому. Поле смещения используется, чтобы представлять преобразование. |
Эта таблица сравнивает опции функции регистрации облака точек, их типы преобразования и их показатели производительности. Используйте эту таблицу, чтобы выбрать соответствующую регистрационную функцию на основе вашего случая..
| Регистрационный метод (функция) | Тип преобразования | Описание | Показатели производительности |
|---|---|---|---|
pcregisterndt | Твердый |
| Быстрый регистрационный метод, но обычно медленнее, чем ICP |
pcregistericp | Твердый | Локальный регистрационный метод, который использует начальную оценку преобразования | Самый быстрый регистрационный метод |
pcregistercpd | Твердый, аффинно, и нетвердый | Глобальный метод, который не использует начальную оценку преобразования | Самый медленный регистрационный метод |
Чтобы улучшить точность и скорость расчета регистрации, проредите облака точек с помощью pcdownsample функция перед регистрацией.
Удалите ненужные функции из облака точек при помощи функций, таких как:
segmentGroundFromLidarData — Разбиение точек заземления из подготовленных лидарных данных
pcsegdist — Облако точек сегмента в кластеры на основе Евклидова расстояния
pcfitplane — Соответствуйте плоскости к 3-D облаку точек
select — Выберите точки в облаке точек
Локальные регистрационные методы, такие как те, которые используют NDT или ICP (pcregisterndt или pcregistericp, соответственно), потребуйте первоначальных оценок. Чтобы получить первоначальную оценку используют другой датчик, такой как инерционный модуль измерения (IMU) или другие формы одометрии. Улучшение первоначальной оценки помогает регистрационному алгоритму сходиться быстрее.
Увеличьте 'MaxIterations' свойство или уменьшение 'Tolerance' свойство для более точных регистрационных результатов, но более медленных регистрационных скоростей.
[1] Мыроненко, A., и X. Песня. "Укажите Регистрацию Набора: Когерентный Дрейф Точки. "Продолжения Транзакций IEEE согласно Анализу Шаблона и Искусственному интеллекту (TPAMI). Издание 32, Номер 12, декабрь 2010, стр 2262–2275.
[2] Чен, Y. и Г. Медьони. “Объектное моделирование Регистрацией Нескольких Изображений Области значений”. Отобразите Вычисление Видения. Баттерворт-Хейнеманн. Издание 10, Выпуск 3, апрель 1992, стр 145–155.
[3] Besl, Пол Дж., Н. Д. Маккей. “Метод для Регистрации 3-D Форм”. Транзакции IEEE согласно Анализу Шаблона и Искусственному интеллекту. Лос-Аламитос, CA: Общество эпохи компьютеризации IEEE. Издание 14, Выпуск 2, 1992, стр 239–256.
[4] Бибер, P. и В. Стрэсер. “Преобразование Нормальных распределений: Новый Подход к Лазерному Соответствию Сканирования”. Продолжения Международной конференции IEEE/RSJ по вопросам Интеллектуальных Роботов и Систем (IROS). Лас-Вегас, NV. Издание 3, ноябрь 2003, стр 2743–2748.
[5] Магнуссон, M. “3D нормальные распределения преобразовывают — эффективное представление для регистрации, поверхностного анализа и обнаружения цикла”. Кандидатская диссертация. Университет Örebro, Örebro, Швеция, 2013.
pcregistercpd | pcregistericp | pcregisterndt
