Этот пример начинается с модели Simulink® нев реальном времени ослабленного генератора, ex_slrt_nrt_osc (open_system(docpath(fullfile(docroot, 'toolbox', 'xpc', 'examples', 'ex_slrt_nrt_osc')))). Чтобы завершить пример, необходимо уже знать, как создать, сконфигурировать, и симулировать такую модель.

Когда вы проходите пример, вы преобразовываете ex_slrt_nrt_osc в модель Simulink Real-Time™, сконфигурированную, чтобы создать как приложение реального времени. Вы затем создаете, загружаете и выполняете приложение реального времени на целевом компьютере.
Итоговой моделью является ex_slrt_rt_osc (open_system(docpath(fullfile(docroot, 'toolbox', 'xpc', 'examples', 'ex_slrt_rt_osc')))):

Чтобы запустить модель Simulink как приложение реального времени под Simulink Real-Time, добавьте и сконфигурируйте блок Scope в реальном времени и установите параметры конфигурации для генерации кода и предназначайтесь для выполнения.
Simulink Real-Time поддерживает блок Scope в реальном времени. Существует три типа осциллографов Simulink Real-Time: target, host, и file. Этот пример использует target определите объем, который отображает данные о выполнении по монитору целевого компьютера.
В Окне Команды MATLAB введите ex_slrt_nrt_osc.
MATLAB® загружает модель генератора и отображает Диаграмму Simulink.
В Редакторе Simulink, от раздела Prepare вкладки Real-Time, нажимают Library Browser.
В Simulink, на левой панели, обзоре к и дважды кликают узел Simulink Real-Time.
Список категорий блока I/O открывается.
Из списка категорий блока I/O кликните по узлу Displays and Logging.
Перетащите блок Scope к Диаграмме Simulink.
Simulink добавляет новый блок Scope в реальном времени в модель с идентификатором осциллографа 1.
Соедините Mux выход с входом блока Scope.
На вкладке Simulation, от кнопки Save, нажимают Save As. Введите имя файла. Например, введите ex_slrt_ucf_osc, и затем нажмите OK.
Несконфигурированной моделью является ex_slrt_ucf_osc (open_system(docpath(fullfile(docroot, 'toolbox', 'xpc', 'examples', 'ex_slrt_ucf_osc')))).

Параметры блоков осциллографа задают сигналы проследить на триггерных режимах и осциллографе. Диалоговое окно блока Осциллографа Simulink Real-Time изменяется, в зависимости от которого типа осциллографа вы конфигурируете: target, host, или file. Для этого примера сконфигурируйте target осциллограф.
Для получения дополнительной информации о target в реальном времени Определите объем параметров, смотрите, Конфигурируют Целевые Блоки Осциллографа В реальном времени.
В Окне Команды MATLAB введите ex_slrt_ucf_osc.
MATLAB загружает модель генератора и отображает Диаграмму Simulink.
Дважды кликните блок Scope.
Выберите Scope type
Target. Это значение означает, что отображение осциллографа появляется на мониторе целевого компьютера.
В диалоговом окне параметров блоков установите флажок Start scope when application starts.
Эта установка обязательна в Stand Alone режим, потому что компьютер разработчика не доступен, чтобы дать команду, чтобы запустить осциллографы.
Выберите Scope mode
Graphical redraw.
Установите флажок Grid.
В текстовом поле Y-axis limits введите [0,0]. Это значение означает, что масштабированием отображения является auto.
В текстовом поле Number of samples. введите 1000. Для Scope mode Graphical redraw, это значение означает, что 1 000 выборок получены, прежде чем график перерисован.
В текстовом поле Number of pre/post samples введите 0. Это значение означает, что выборки не сохранены перед триггером или пропущенные после триггера.
В текстовом поле Decimation введите 1. Это значение означает, что данные собраны в каждом демонстрационном интервале.
Выберите Trigger mode
FreeRun. Это значение означает, что триггерное событие является автоматическим, и никакая внешняя триггерная спецификация не требуется.
Целевое диалоговое окно scope выглядит так фигура.

Нажмите OK, и затем от вкладки Simulation, нажмите Save.
Модель в качестве примера, ex_slrt_ucf_osc, модель нев реальном времени ослабленного генератора. Вы вводите симуляцию и параметры запуска в реальном времени в диалоговом окне Configuration Parameters. Эти параметры предоставляют информацию Simulink Coder™ о том, как создать приложение реального времени из модели Simulink.
После того, как вы откроете модель Simulink и запустите целевой компьютер, можно ввести параметры симуляции.
В Окне Команды MATLAB введите ex_slrt_ucf_osc.
В Редакторе Simulink, от вкладки Real-Time, нажимают Hardware Settings.
В диалоговом окне Configuration Parameters кликните по узлу Solver.
В разделе Solver selection, из списка Type, выбирают Fixed-step.
Из списка Solver выберите решатель. Например, выберите решатель общего назначения ode4 (Runge-Kutta).
Под Solver details, в поле Fixed-step size (fundamental sample time), вводят шаг расчета для приложения реального времени. Например, введите 0.00025 секунды (250 микросекунды). После создания приложения реального времени можно изменить это значение.
Если вы находите, что значение перегружает центральный процессор на целевом компьютере, попробуйте большее значение Fixed-step size, такое как 0.0002 секунды.
Шаги расчета блоков модели могут быть множителями только Fixed-step size. Если вы вводите 'auto' в Fixed-step size основной шаг расчета вычисляется от шагов расчета блоков модели.

В диалоговом окне Configuration Parameters кликните по узлу Code Generation.
Чтобы создать основное приложение реального времени, в разделе Target selection, нажимают Browse в списке System target file. Нажмите slrt.tlc, и затем нажмите OK.
Системный конечный файл slrt.tlc, make-файл шаблона slrt_default_tmf, и сделать команда make_rtw автоматически вводятся в страницу. Узел Simulink Real-Time Options появляется на левой панели.

Нажмите OK.
Во вкладке Simulation, от кнопки Save, нажимают Save As.
Введите имя файла. Например, введите ex_slrt_rt_osc (open_system(docpath(fullfile(docroot, 'toolbox', 'xpc', 'examples', 'ex_slrt_rt_osc')))).
Запуск целевого компьютера загружает и запускает Ядро Simulink Real-Time на целевом компьютере. Загрузчик затем ожидает программного обеспечения Simulink Real-Time, чтобы загрузить приложение реального времени с компьютера разработчика.
После того, как вы сконфигурировали продукт Simulink Real-Time при помощи Simulink Real-Time Explorer, можно запустить целевой компьютер и установить связь компьютера разработчика с целевым компьютером. Прежде, чем создать приложение реального времени, вы запускаете целевой компьютер. После того, как процесс сборки завершается, вы загружаете приложение реального времени на целевой компьютер.
Запустите целевой компьютер.
Заметьте, что целевой компьютер отображает экран Simulink Real-Time.
Если вам присоединили клавиатуру к целевому компьютеру, можно активировать ту клавиатуру или консоль для команд целевого компьютера путем ввода C. Нажмите клавиши Page Up и Page Down к странице вверх и вниз в мониторе целевого компьютера. Для получения дополнительной информации смотрите Команды Целевого компьютера.
Окно состояния показывает, что ядро находится в режиме загрузчика и ожидающий, чтобы загрузить приложение реального времени. Значение памяти является количеством байтов памяти целевого компьютера, доступной для кучи для выполнения осциллографов, и для буферов сбора данных.
Память целевого компьютера для исполняемого файла приложения реального времени, ядра и другого использования ограничивается максимумом 4 Гбайт.
Модель в качестве примера является моделью реального времени ослабленного генератора, ex_slrt_rt_osc (open_system(docpath(fullfile(docroot, 'toolbox', 'xpc', 'examples', 'ex_slrt_rt_osc')))). Чтобы сгенерировать код С, компиляцию, ссылка, и загрузить приложение реального времени на целевой компьютер, использует процесс сборки Simulink Real-Time.
После того, как вы введете изменения в диалоговое окно Configuration Parameters, можно создать приложение реального времени. По умолчанию процедура сборки загружает приложение реального времени на целевой компьютер по умолчанию, как определяется в Simulink Real-Time Explorer. Для получения дальнейшей информации при установке целевого компьютера для приложения реального времени, смотрите панель Options Simulink Real-Time.
В Окне Команды MATLAB введите ex_slrt_rt_osc.
MATLAB загружает модель генератора и отображает Диаграмму Simulink.
В Редакторе Simulink, от вкладки Real-Time, нажимают Run on Target.
На компьютере разработчика можно просмотреть состояние сборки после завершения сборки в Diagnostics Viewer. На вкладке Debug нажмите Diagnostics.
Если вам соединили монитор с вашим целевым компьютером, экран монитора отображает экран Simulink Real-Time с именем приложения.
В Командном Окне MATLAB введите:
tg = slrt('TargetPC1')MATLAB отображает список свойств для целевого объекта tg.
Если программное обеспечение обнаруживает ошибку во время сборки и загрузки, смотрите Поиск и устранение проблем в Simulink Real-Time.
Если вы загружаете приложение реального времени, созданное версией Simulink Real-Time, отличающейся от версии ядра на целевом компьютере, программное обеспечение распечатывает ошибку:
Mismatch between model and kernel versions
Чтобы предотвратить это несоответствие версии, восстановите приложения реального времени с каждым новым релизом Simulink Real-Time.
Во время процесса сборки программное обеспечение Simulink Real-Time создает целевой объект, который представляет приложение реального времени, работающее на целевом компьютере. Вы управляете приложением реального времени и компьютером путем установки свойств целевого объекта и вызывания функций целевого объекта. Для списка этих функций, таких как load, смотрите SimulinkRealTime.target.
Управление приложения реального времени с Simulink ограничивается соединением модели Simulink к приложению реального времени через режим external mode и затем запуска приложения реального времени. Используя Simulink режим external mode является одним методом к настройкам параметров.
Модель соединяется с целевым компьютером, который вы выбрали в Редакторе Simulink на вкладке Real-Time.
Чтобы избежать коммуникационных проблем целевого компьютера, не используйте режим external mode Simulink, в то время как Simulink Real-Time Explorer запускается. Используйте только один интерфейс.
После того, как вы создадите и загрузите приложение реального времени на целевой компьютер, можно запустить приложение реального времени. Эта процедура использует модель Simulink ex_slrt_rt_osc (open_system(docpath(fullfile(docroot, 'toolbox', 'xpc', 'examples', 'ex_slrt_rt_osc')))). См. Приложение реального времени Сборки и Загрузки при помощи Работавшего Цель. Вы, должно быть, уже задали необходимую среду целевого компьютера. А именно, необходимо выбрать целевой компьютер, с которым вы хотите соединиться. См. описание флажка Build for default target computer в панели Options Simulink Real-Time.
В Редакторе Simulink соединитесь с целевым компьютером. Во вкладке Real-Time нажмите Toggle target computer connection
![]() . Состояние связи переключается к связанному состоянию
. Состояние связи переключается к связанному состоянию![]() .
.
Во вкладке Real-Time, от Run on Target, запускают Step by Step Commands путем выбора Build Application.

После того, как сборка модели завершается, во вкладке Real-Time, от Run on Target, выберите Deploy to Target.

После того, как приложение реального времени развертывается к цели, во вкладке Real-Time, от Run on Target, выберите Connect Model.

После того, как вы соединяете модель с приложением реального времени, строка состояния отображается Внешний, чтобы указать, что модель готова к симуляции режима external mode. В этом режиме модель служит интерфейсом к приложению. Это связь разрешает настраивать параметры в приложении реального времени, не восстанавливая приложение. Эта связь также разрешает наблюдать действие сигнала в приложении реального времени при помощи, например, блоки SimulinkScope в модели.
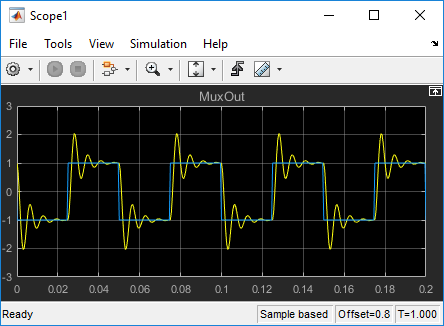
Во вкладке Real-Time, от Start Application (Run on Target), выбирают Start Application.

Текущие параметры модели Simulink загружаются от компьютера разработчика до приложения реального времени. Приложение реального времени начинает запускаться, и блок Simulink Scope отображает вывод.
Чтобы остановить выполнение, во вкладке Real-Time, от Stop Application (Run on Target), выбирают Stop Application.

Когда приложение реального времени развернулось к целевому компьютеру, Пошаговые Команды предоставляют несколько дополнительных возможностей рабочего процесса.
| Команды | Пошаговые операции |
|---|---|
|
| В Step by Step Commands, после того, как вы развернете приложение реального времени в целевой компьютер, можно соединить модель с приложением реального времени. Операция Connect Model позволяет вам использовать модель в качестве интерфейса к приложению реального времени для симуляции режима external mode. |
|
| В Step by Step Commands, после того, как вы соедините модель с приложением реального времени на целевом компьютере, можно отключить модель от приложения реального времени. Операция Disconnect Model позволяет вам поддерживать симуляцию в реальном времени в рабочем состоянии на целевом компьютере и снова соединиться с моделью в более позднее время. |
|
| В Step by Step Commands, после того, как вы развернете приложение реального времени в целевой компьютер и соедините модель с приложением реального времени, можно запустить приложение реального времени. Операция Start Application позволяет вам запустить приложение реального времени для симуляции режима external mode. |
|
| Когда вы соединяетесь в режиме external mode, чтобы перезапустить приложение реального времени со времени |
Mux | Scope | Scope | SimulinkRealTime.target | load | viewTargetScreen


