

Преобразуйте регулируемый параметр для looptune к регулируемому параметру для systune
[ преобразует регулируемый параметр для T0,SoftReqs,HardReqs,sysopt]
= looptuneSetup(looptuneInputs)looptune в эквивалентный регулируемый параметр для systune. Аргумент looptuneInputs последовательность входных параметров для looptune это задает регулируемый параметр. Например,
[T0,SoftReqs,HardReqs,sysopt] = looptuneSetup(G0,C0,wc,Req1,Req2,loopopt)
looptune(G0,C0,wc,Req1,Req2,loopopt) и systune(T0,SoftReqs,HardReqs,sysopt) приведите к тем же результатам.Используйте эту команду, чтобы использовать в своих интересах дополнительную гибкость это systune предложения относительно looptune. Например, looptune требует, чтобы вы настроили все каналы обратной связи MIMO к той же целевой пропускной способности. Преобразование в systune позволяет вам задавать различные частоты среза и формы цикла для каждого цикла в вашей системе управления. Кроме того, looptune обработки все настраивающие требования как мягкие требования, оптимизируя их, но не требуя, что любое ограничение точно соответствоваться. Преобразование в systune позволяет вам осуществлять некоторые настраивающиеся требования так же трудные ограничения, при обработке других как мягкие требования.
Можно также использовать эту команду, чтобы зондировать в настраивающиеся требования, используемые looptune.
Примечание
При настройке моделей Simulink® через slTuner интерфейс, использовать looptuneSetup (Simulink Control Design) для slTuner.
Преобразуйте ряд looptune входные параметры в эквивалентный набор входных параметров для systune.
Предположим, что у вас есть числовая модель объекта управления, G0, и настраиваемые модели контроллеров, C0. Предположим также, что вы использовали looptune настроить обратную связь между G0 и C0 к в пропускной способности wc = [wmin,wmax]. Преобразуйте эти переменные в форму, которая позволяет вам использовать systune для дальнейшей настройки.
[T0,SoftReqs,HardReqs,sysopt] = looptuneSetup(C0,G0,wc);
Команда возвращает систему с обратной связью и настраивающиеся требования для эквивалентного systune команда, systune(CL0,SoftReqs,HardReqs,sysopt). Массивы SoftReqs и HardReqs содержите настраивающиеся требования, неявно наложенные looptune. Эти требования осуществляют целевую пропускную способность и запасы устойчивости по умолчанию looptune.
Если вы использовали дополнительные настраивающие требования при настройке системы с looptune, добавьте их в список входов looptuneSetup. Например, предположите, что вы использовали a TuningGoal.Tracking требование, Req1, и a TuningGoal.Rejection требование, Req2. Предположим также, что вы устанавливаете опции алгоритма для looptune использование looptuneOptions. Включите эти требования и опции в эквивалент systune команда.
[T0,SoftReqs,HardReqs,sysopt] = looptuneSetup(C0,G0,wc,Req1,Req2,loopopt);
Получившиеся аргументы позволяют вам создавать эквивалентную настраивающую проблему для systune. В частности, [~,C] = looptune(C0,G0,wc,Req1,Req2,loopopt) приводит к тому же результату как следующие команды.
T = systune(T0,SoftReqs,HardReqs,sysopt); C = setBlockValue(C0,T);
Настройте следующую систему управления для настройки с looptune. Затем преобразуйте настройку в systune проблема и исследует результаты. Эти результаты отражают структуру модели системы управления что looptune мелодии. Результаты также отражают настраивающиеся требования, неявно осуществленные при настройке с looptune.

В данном примере объект 2 на 2 G представлен:
Контроллер фиксированной структуры, C, включает три компонента: разъединяющийся матричный D 2 на 2 и два ПИ-контроллера PI_L и PI_V. Сигналы rY, и e сигналы с векторным знаком размерности 2.
Создайте числовую модель, которая представляет объект и настраиваемую модель, которая представляет контроллер. Назовите все вводы и выводы как в схеме, так, чтобы looptune и looptuneSetup знайте, как соединить объект и контроллер через сигналы управления и измерения.
s = tf('s'); G = 1/(75*s+1)*[87.8 -86.4; 108.2 -109.6]; G.InputName = {'qL','qV'}; G.OutputName = {'y'}; D = tunableGain('Decoupler',eye(2)); D.InputName = 'e'; D.OutputName = {'pL','pV'}; PI_L = tunablePID('PI_L','pi'); PI_L.InputName = 'pL'; PI_L.OutputName = 'qL'; PI_V = tunablePID('PI_V','pi'); PI_V.InputName = 'pV'; PI_V.OutputName = 'qV'; sum1 = sumblk('e = r - y',2); C0 = connect(PI_L,PI_V,D,sum1,{'r','y'},{'qL','qV'});
Эта система теперь готова к настройке с looptune, использование настраивающихся целей, которые вы задаете. Например, укажите целевой диапазон пропускной способности. Создайте настраивающееся требование, которое налагает отслеживание уставки в обоих каналах системы со временем отклика в 15 с и требование подавления помех.
wc = [0.1,0.5]; TR = TuningGoal.Tracking('r','y',15,0.001,1); DR = TuningGoal.Rejection({'qL','qV'},1/s); DR.Focus = [0 0.1]; [G,C,gam,info] = looptune(G,C0,wc,TR,DR);
Final: Peak gain = 1, Iterations = 41 Achieved target gain value TargetGain=1.
looptune успешно настраивает систему на эти требования. Однако вы можете хотеть переключиться на systune использовать в своих интересах дополнительную гибкость в конфигурировании вашей проблемы. Например, вместо того, чтобы настроить оба канала на пропускную способность цикла в wc, вы можете хотеть задать различные частоты среза для каждого цикла. Или, вы можете хотеть осуществить настраивающиеся требования TR и DR так же трудные ограничения, и добавляют другие требования как мягкие требования.
Преобразуйте looptune входные параметры к набору входных параметров для systune.
[T0,SoftReqs,HardReqs,sysopt] = looptuneSetup(G,C0,wc,TR,DR);
Эта команда возвращает набор аргументов, которые можно предоставить systune для эквивалентных результатов к настройке с looptune. Другими словами, следующая команда эквивалентна предыдущему looptune команда.
[T,fsoft,ghard,info] = systune(T0,SoftReqs,HardReqs,sysopt);
Final: Peak gain = 1, Iterations = 41 Achieved target gain value TargetGain=1.
Исследуйте аргументы, возвращенные looptuneSetup.
T0
T0 =
Generalized continuous-time state-space model with 0 outputs, 2 inputs, 4 states, and the following blocks:
APU_: Analysis point, 2 channels, 1 occurrences.
APY_: Analysis point, 2 channels, 1 occurrences.
Decoupler: Tunable 2x2 gain, 1 occurrences.
PI_L: Tunable PID controller, 1 occurrences.
PI_V: Tunable PID controller, 1 occurrences.
Type "ss(T0)" to see the current value, "get(T0)" to see all properties, and "T0.Blocks" to interact with the blocks.
Программное обеспечение создает систему управления с обратной связью для systune путем соединения объекта и контроллера в их сигналах управления и измерения, и вставки двухканального AnalysisPoint блокируйтесь в каждом из местоположений связи, как проиллюстрировано в следующей схеме.

При настройке системы управления этим примером с looptune, все требования обработаны как мягкие требования. Поэтому HardReqs isempty. SoftReqs массив TuningGoal требования. Эти требования вместе осуществляют пропускную способность и поля looptune команда, плюс дополнительные требования, чтобы вы задали.
SoftReqs
SoftReqs=5×1 object
5x1 heterogeneous SystemLevel (LoopShape, Tracking, Rejection, ...) array with properties:
Models
Openings
Name
Исследуйте первую запись в SoftReqs.
SoftReqs(1)
ans =
LoopShape with properties:
LoopGain: [1x1 zpk]
CrossTol: 0.3495
Focus: [0 Inf]
Stabilize: 1
LoopScaling: 'on'
Location: {2x1 cell}
Models: NaN
Openings: {0x1 cell}
Name: 'Open loop CG'
looptuneSetup описывает целевую область значений частоты среза wc как TuningGoal.LoopShape требование. Это требование ограничивает профиль коэффициента усиления разомкнутого контура к форме цикла, сохраненной в LoopGain свойство, с частотой среза и перекрестным допуском (CrossTol) определенный wc. Исследуйте эту форму цикла.
viewGoal(SoftReqs(1))

Целевое перекрестное соединение описывается как профиль усиления интегратора с перекрестным соединением между 0.1 и 0,5 рад/с, как задано wc. Если вы хотите задать различную форму цикла, можно изменить этот TuningGoal.LoopShape требование прежде, если это к systune.
looptune также мелодии к запасам устойчивости по умолчанию, что можно изменить использование looptuneOptions. Для systune, запасы устойчивости заданы с помощью TuningGoal.Margins требования. Здесь, looptuneSetup описал запасы устойчивости по умолчанию looptune как мягкий TuningGoal.Margins требования. Например, исследуйте четвертую запись в SoftReqs.
SoftReqs(4)
ans =
Margins with properties:
GainMargin: 7.6000
PhaseMargin: 45
ScalingOrder: 0
Focus: [0 Inf]
Location: {2x1 cell}
Models: NaN
Openings: {0x1 cell}
Name: 'Margins at plant inputs'
Последняя запись в SoftReqs подобный TuningGoal.Margins требование, ограничивающее поля на объекте выходные параметры. looptune осуществляет эти поля как мягкие требования. Если вы хотите преобразовать их в трудные ограничения, передайте их systune во входном векторе HardReqs вместо входного вектора SoftReqs.
T0 — Модель системы управления с обратной связьюМодель системы управления с обратной связью для настройки с systune, возвращенный как обобщенное пространство состояний genss модель. Вычислить T0, объект, G0, и контроллер, C0, объединены в настройке обратной связи следующего рисунка.
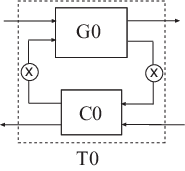
Связи между C0 и G0 определяются путем соответствия с сигналами с помощью InputName и OutputName свойства этих двух моделей. В общем случае сигнальные линии в схеме могут представлять сигналы с векторным знаком. AnalysisPoint блоки, обозначенные X в схеме, вставляются между контроллером и объектом. Это позволяет определение разомкнутого контура и требований с обратной связью к сигналам, введенным или измеренным при вводах или выводах объекта. Например, пропускная способность wc преобразован в TuningGoal.LoopShape требование, которое налагает желаемое перекрестное соединение на сигнал разомкнутого контура, измеренный во входе объекта.
Для получения дополнительной информации о структуре моделей системы управления с обратной связью для настройки с systune, смотрите systune страница с описанием.
SoftReqs — Мягкие настраивающие требованияTuningGoal объекты требованияМягкие настраивающие требования для настройки с systuneВ виде вектора из TuningGoal объекты требования.
looptune экспрессы большинство его неявных настраивающих требований как мягкие настраивающие требования. Например, заданная целевая пропускная способность цикла описывается как a TuningGoal.LoopShape требование с профилем интегральной составляющей и перекрестным соединением на целевой частоте. Кроме того, looptune обработки все явные требования вы задаете (Req1,...ReqN) как мягкие требования. SoftReqs содержит все эти настраивающие требования.
HardReqs — Трудно настраивающиеся требованияTuningGoal объекты требованияТрудно настраивающиеся требования (ограничения) для настройки с systuneВ виде вектора из TuningGoal объекты требования.
Поскольку looptune обработки большинство настраивающихся требований как мягкие требования, HardReqs обычно пусто. Однако, если вы изменяете MaxFrequency по умолчанию опция looptuneOptions установите, loopopt, затем это требование появляется как твердый TuningGoal.Poles ограничение.
sysopt — Опции алгоритма для systune настройкаsystuneOptions опции установленыПри настройке Simulink с помощью slTuner, интерфейс, преобразуйте looptune проблема к systune использование looptuneSetup (Simulink Control Design) для slTuner.
genss | looptune | looptuneOptions | systune | systuneOptions | looptuneSetup
(for slTuner) (Simulink Control Design) | slTuner (Simulink Control Design)