Отклики замкнутой и разомкнутой систем с ПИД-регуляторами
response = getPIDLoopResponse(C,G,looptype)C и объект G. Функция возвращает разомкнутый контур с обратной связью, действие контроллера или ответ воздействия, который вы задаете с looptype аргумент. Функция принимает следующую архитектуру управления.
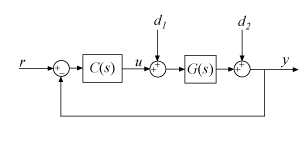
Когда C isa pid или pidstd объект контроллера (контроллер 1-DOF):
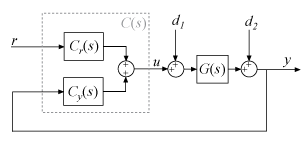
Когда C isa pid2 или pidstd2 объект контроллера (контроллер 2-DOF):
Спроектируйте ПИ-контроллер для объекта SISO и исследуйте его эффективность в отслеживании уставки и подавлении помех. Для отслеживания уставки используйте "closed-loop" ответ. Для отклонения воздействия загрузки используйте "input-disturbance".
G = tf(1,[1 1 1]); C = pidtune(G,'PI'); Tref = getPIDLoopResponse(C,G,"closed-loop"); Tdist = getPIDLoopResponse(C,G,"input-disturbance"); step(Tref,Tdist) legend("Reference Tracking","Disturbance Rejection")

Подтвердите настроенный контроллер путем сравнения извлеченных ответов на конструктивные требования для времени урегулирования и перерегулирования.
Спроектируйте две степени свободы (2-DOF) ПИД-регулятор для объекта и исследуйте его эффективность в отслеживании уставки и подавлении помех. Для отслеживания уставки используйте "closed-loop" ответ. Для отклонения воздействия загрузки используйте "input-disturbance".
G = tf(1,[1 0.5 0.1]); w0 = 1.5; C = pidtune(G,'PID2',w0); Tref = getPIDLoopResponse(C,G,"closed-loop"); Tdist = getPIDLoopResponse(C,G,"input-disturbance"); step(Tref,Tdist) legend("Reference Tracking","Disturbance Rejection")

