Экспортируйте дорожную сеть в OpenDRIVE
export( экспортирует дороги, маршруты и соединения в ведущем сценарии к формату файла OpenDRIVE® 1.4H. Могут быть изменения между исходным сценарием и экспортируемым сценарием. Для получения дополнительной информации смотрите Ограничения.scenario,'OpenDRIVE',filename)
Создайте ведущий сценарий.
inputScenario = drivingScenario;
Импортируйте дорожную сеть OpenStreetMap в ведущий сценарий. Для получения дополнительной информации о osm файле, см. [1].
fileName = 'chicago.osm'; roadNetwork(inputScenario,'OpenStreetMap',fileName);
Экспортируйте в файл OpenDRIVE.
fileName = 'chicago.xodr'; export(inputScenario,'OpenDRIVE',fileName);
Warning: There may be minor variation between the actual driving scenario and the exported OpenDRIVE road networks. For more information, see <a href="matlab:helpview(fullfile(docroot,'toolbox','driving','helptargets.map'),'exportOpenDriveCLI')">export</a>.
Считайте экспортируемый файл OpenDRIVE при помощи roadNetwork функция.
scenario = drivingScenario;
roadNetwork(scenario,'OpenDRIVE',fileName);Постройте экспортируемый сценарий. Заметьте, что отображение для экспортируемой дорожной сети инвертируется по измерениям X и Y и не имеет границ.
figure
plot(inputScenario)
zoom(2);
title('Actual Scenario')
figure
plot(scenario)
zoom(2);
title('Exported Scenario')
Приложение
[1] osm файл загружается с https://www.openstreetmap.org, который обеспечивает доступ к полученным толпой данным о карте во всем мире. Данные лицензируются под Открытыми Данными палата общин Открытая Лицензия Базы данных (ODbL), https://opendatacommons.org/licenses/odbl/.
Создайте ведущий сценарий с одной дорогой, имеющей S-кривую.
scenario = drivingScenario; roadcenters = [-35 20 0; -20 -20 0; 0 0 0; 20 20 0; 35 -20 0];
Создайте маршруты и добавьте их в дорогу.
lm = [laneMarking('Solid','Color','w') ... laneMarking('Dashed','Color','y') ... laneMarking('Dashed','Color','y') ... laneMarking('Solid','Color','w')]; ls = lanespec(3,'Marking',lm); road(scenario,roadcenters,'Lanes',ls);
Постройте сценарий.
plot(scenario)

Экспортируйте дорожную сеть в сценарии к файлу OpenDRIVE.
fileName = 'scurveroad.xodr'; export(scenario,'OpenDRIVE',fileName)
Warning: There may be minor variation between the actual driving scenario and the exported OpenDRIVE road networks. For more information, see <a href="matlab:helpview(fullfile(docroot,'toolbox','driving','helptargets.map'),'exportOpenDriveCLI')">export</a>.
Можно импортировать файл OpenDRIVE к рабочему пространству MATLAB при помощи roadNetwork функция.
scenario = drivingScenario;
roadNetwork(scenario,'OpenDRIVE',fileName)
plot(scenario)
export функция не экспортирует агентов и их свойства от исходного сценария до формата OpenDRIVE.
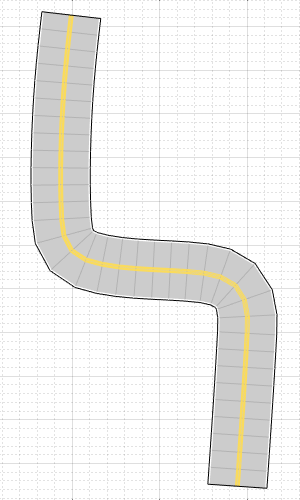
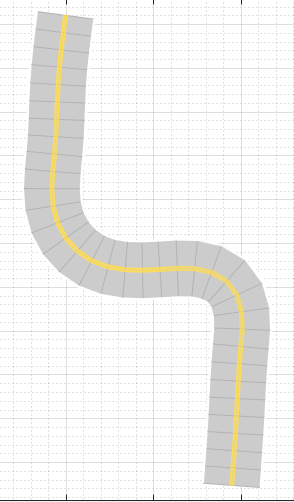
Кубический полином и параметрические типы геометрии кубического полинома в сценарии экспортируются как спиральные типы геометрии. Это вызывает некоторые изменения экспортируемой дорожной геометрии, если дорога является кривой дорогой. Например, на рисунке ниже, заметьте, что острые углы на входной дороге стали относительно сглаженными, когда экспортируется в формат OpenDRIVE.
| Инпут-Роуд | Экспортируемая ОПЕНДРАЙВ-Роуд |
|
|
|
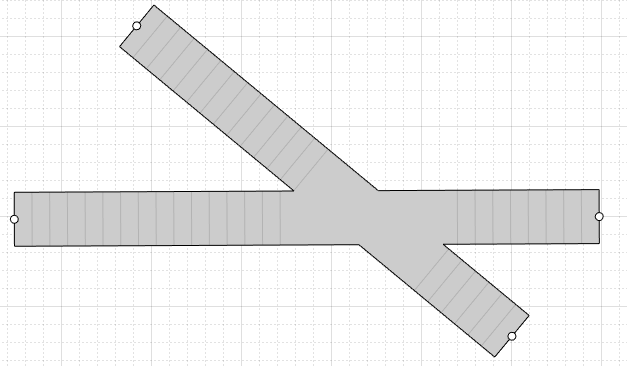
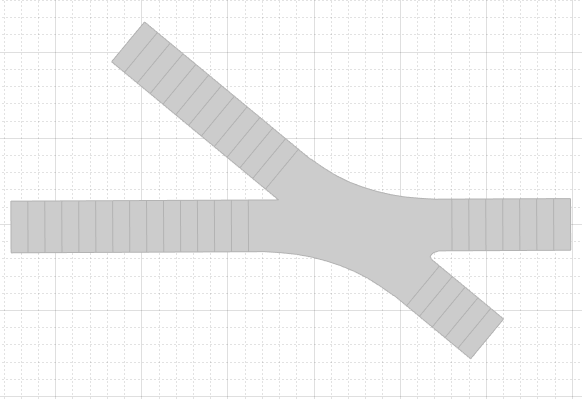
Соединения дорожной сети обрабатываются без информации о связи маршрута и так, формы соединения не могут быть точными в экспортируемом сценарии.
| Инпут-Роуд | Экспортируемая ОПЕНДРАЙВ-Роуд |
|
|
|
Ограничения в импорте OpenDRIVE применяются к экспорту OpenDRIVE, если вы экспортируете ведущий объект сценария, который содержит импортированный сценарий OpenDRIVE. Можно импортировать сценарий OpenDRIVE к drivingScenario объект при помощи roadNetwork функция. Для получения информации об ограничениях в импорте OpenDRIVE смотрите roadNetwork.