Задержка входа на изменяющийся во времени дробный номер периодов расчета
Примечание
DirectFeedthrough свойство было удалено. Удалите все экземпляры этого свойства в вашем коде MATLAB®. Для получения дополнительной информации см. Вопросы совместимости.
dsp.VariableFractionalDelay Система object™ задерживает входной сигнал конкретным количеством дробных выборок вдоль каждого канала входа. Объект может также одновременно вычислить несколько задержанных версий (касания) того же сигнала. Для примера смотрите, что Задержка Сигнала Использует Мультикасание Дробная Задержка.
Объект интерполирует входной сигнал, чтобы получить новые выборки в интервалах выборки нецелого числа. Можно установить свойство InterpolationMethod на 'Linear', 'FIR', или 'Farrow'. Поддержка объектов изменяющиеся во времени значения задержки. Таким образом, значение задержки может меняться в системе координат от выборки до выборки. Можно также задать максимальное значение задержки при помощи свойства MaximumDelay. Задержите значения, больше, чем максимум отсекается к максимуму.
Задержать вход изменяющимся во времени дробным номером периодов расчета:
Создайте dsp.VariableFractionalDelay объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты?.
vfd = dsp.VariableFractionalDelay
vfd = dsp.VariableFractionalDelay(Name,Value)
vfdOut = vfd(input,d)d выборки. d должно быть меньше чем или равно значению, которое вы задаете в свойстве MaximumDelay объекта.
Задержите значения, больше, чем заданная максимальная задержка отсекается соответственно. Каждый столбец входа обработан как независимый канал.
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Примечание: Если вы используете R2016a или более ранний релиз, заменяете каждый вызов объекта с эквивалентным step синтаксис. Например, obj(x) становится step(obj,x).
Задержите сигнал различным дробным номером периодов расчета.
sr = dsp.SignalSource; vfd = dsp.VariableFractionalDelay; sink = dsp.SignalSink; for ii = 1:10 delayedsig = vfd(sr(), ii/10); sink(delayedsig); end sigd = sink.Buffer;
Выход sigd соответствует значениям задержанного сигнала, которые производятся в фиксировано-разовых интервалах. Чтобы построить моменты времени, в которые амплитуды выборок сигнала являются постоянными, обработайте сигналы как моменты выборки.
stem(sr.Signal, 1:10, 'b') hold on; stem(sigd.', 1:10, 'r'); legend('Original signal', ... 'Variable fractional delayed signal', ... 'Location','best')

Примечание: Если вы используете R2016a или более ранний релиз, заменяете каждый вызов объекта с эквивалентным синтаксисом шага. Например, obj (x) становится шагом (obj, x).
Задержите входной сигнал с помощью dsp.VariableFractionalDelay объект. Каждое значение задержки уникально и может варьироваться от выборки до выборки в системе координат и может варьироваться через каналы. Можно вычислить несколько задержанных версий того же входного сигнала одновременно путем передачи задержки входа с соответствующей размерностью.
Полагайте, что вход случайный сигнал с одним каналом и форматом кадра 10. Примените задержку 4,8 и 8,2 выборок одновременно.
vfd = dsp.VariableFractionalDelay
vfd =
dsp.VariableFractionalDelay with properties:
InterpolationMethod: 'Linear'
InitialConditions: 0
MaximumDelay: 100
Show all properties
in = randn(10,1)
in = 10×1
0.5377
1.8339
-2.2588
0.8622
0.3188
-1.3077
-0.4336
0.3426
3.5784
2.7694
delayVec = [4.8 8.2]; outcase1 = vfd(in,delayVec)
outcase1 = 10×2
0 0
0 0
0 0
0 0
0.1075 0
0.7969 0
1.0153 0
-1.6346 0
0.7535 0.4301
-0.0065 1.5746
Каждый канал в выходе задерживается 4,8 и 8,2 выборками, соответственно. Объект использует 'Линейный' метод интерполяции вычислить задержанное значение. Для получения дополнительной информации см. 'Алгоритмы' в dsp.VariableFractionalDelay object page.
Для того же вектора задержки, если вход имеет 2 канала, каждый элемент вектора задержки применяется на соответствующий канал во входе.
release(vfd); in = randn(10,2)
in = 10×2
-1.3499 0.6715
3.0349 -1.2075
0.7254 0.7172
-0.0631 1.6302
0.7147 0.4889
-0.2050 1.0347
-0.1241 0.7269
1.4897 -0.3034
1.4090 0.2939
1.4172 -0.7873
outcase2 = vfd(in,delayVec)
outcase2 = 10×2
0 0
0 0
0 0
0 0
-0.2700 0
-0.4729 0
2.5730 0
0.5677 0
0.0925 0.5372
0.5308 -0.8317
Чтобы вычислить несколько задержанных версий двумерного входного сигнала, передайте вектор задержки как 3D массив. Третья размерность содержит касания или задержки, чтобы применяться на сигнал. Если вы передаете неодноэлементную размерность трети (1 1 P), где P представляет количество касаний, то же касание применяется через все каналы. Передайте задержки [4.8 8.2] в третьей размерности.
clear delayVec; delayVec(1,1,1) = 4.8; delayVec(1,1,2) = 8.2; whos delayVec
Name Size Bytes Class Attributes delayVec 1x1x2 16 double
delayVec 1 1 2 массивами. Передайте двумерный вход dsp.VariableFractionalDelay объект с этим вектором задержки.
release(vfd); outcase3 = vfd(in,delayVec)
outcase3 =
outcase3(:,:,1) =
0 0
0 0
0 0
0 0
-0.2700 0.1343
-0.4729 0.2957
2.5730 -0.8225
0.5677 0.8998
0.0925 1.4020
0.5308 0.5981
outcase3(:,:,2) =
0 0
0 0
0 0
0 0
0 0
0 0
0 0
0 0
-1.0799 0.5372
2.1580 -0.8317
whos outcase3Name Size Bytes Class Attributes outcase3 10x2x2 320 double
outcase3(:,:,1) представляет входной сигнал, задержанный 4,8 выборками. outcase3(:,:,2) представляет входной сигнал, задержанный 8,2 выборками. Та же задержка применяется через все каналы.
Кроме того, если вы передаете неодноэлементное второе измерение (1 L P), где L является количеством входных каналов, касания варьируются через каналы. Примените векторы задержки [2.3 3.5] и [4.4 5.6], чтобы вычислить две задержанных версии входного сигнала.
clear delayVec; delayVec(1,1,1) = 2.3; delayVec(1,2,1) = 3.5; delayVec(1,1,2) = 4.4; delayVec(1,2,2) = 5.6; whos delayVec
Name Size Bytes Class Attributes delayVec 1x2x2 32 double
release(vfd); outcase4 = vfd(in,delayVec)
outcase4 =
outcase4(:,:,1) =
0 0
0 0
-0.9449 0
1.7195 0.3357
1.4183 -0.2680
0.1735 -0.2451
0.4814 1.1737
0.0709 1.0596
-0.1484 0.7618
1.0055 0.8808
outcase4(:,:,2) =
0 0
0 0
0 0
0 0
-0.8099 0
1.2810 0.2686
1.6492 -0.0801
0.2523 -0.4376
0.4036 1.0824
0.1629 1.1737
whos outcase4Name Size Bytes Class Attributes outcase4 10x2x2 320 double
outcase4(:,:,1) содержит входной сигнал, задержанный вектором [2.3 3.5]. outcase4(:,:,2) содержит входной сигнал, задержанный вектором [4.4 5.6].
Чтобы варьироваться задержка в системе координат от выборки до выборки, первая размерность вектора задержки (N 1 P или N L P) должна равняться формату кадра входа (N-by-L). Передайте вектор задержки из размера 10 1 2.
clear delayVec; delayVec(:,1,1) = 3.1:0.1:4; delayVec(:,1,2) = 0.1:0.1:1; whos delayVec
Name Size Bytes Class Attributes delayVec 10x1x2 160 double
release(vfd); outcase5 = vfd(in,delayVec)
outcase5 =
outcase5(:,:,1) =
0 0
0 0
0 0
-0.8099 0.4029
0.8425 -0.2680
2.1111 -0.4376
0.4889 0.9911
0.0925 1.4020
0.6228 0.5435
-0.2050 1.0347
outcase5(:,:,2) =
-1.2149 0.6043
2.1580 -0.8317
1.4183 0.1398
0.2523 1.2650
0.3258 1.0596
0.3469 0.7072
-0.1807 0.9424
0.1986 0.5208
1.4816 -0.2437
1.4090 0.2939
Задержка варьируется через каждый элемент по каналу. Тот же набор значений задержки применяется через все каналы. delayVec(:,1,1) применяется к первому задержанному сигналу и delayVec(:,1,2) применяется к второму задержанному сигналу.
dsp.VariableFractionalDelay Системный объект поддерживает вход переменного размера, и задержите сигналы. Таким образом, можно изменить размерность входного сигнала и сигнала задержки даже после вызова алгоритма. Можно изменить размерности одной или обоих сигналы одновременно. Вместе, они должны убедиться, что количество выходных каналов (количество столбцов) остается постоянным.
Поддержка переменного размера входного сигнала
Количество выборок в каждой системе координат входного сигнала может измениться. Однако количество входных каналов должно остаться постоянным.
Создайте dsp.VariableFractionalDelay объект. Передайте входной сигнал размера [256 1] и задержка 1,4 к объектному алгоритму. В последующих вызовах алгоритма измените размер входного кадра в 128, 512, и 64, соответственно
vfd = dsp.VariableFractionalDelay; vfd(randn(256,1),1.4); vfd(randn(128,1),1.4); vfd(randn(512,1),1.4); vfd(randn(64,1),1.4);
Выходной формат кадра (количество строк) изменяется согласно размеру входного кадра. Количество выходных каналов в каждом из этих случаев равняется 1.
Чтобы изменить количество входных каналов, выпустите объект.
release(vfd);
Вызовите алгоритм с двухканальным входом и варьируйтесь размер входного кадра по последующим вызовам.
vfd(randn(256,2),1.4); vfd(randn(128,2),1.4);
Поддержка переменного размера задерживает сигнал
В дополнение к входу может также варьироваться сигнал задержки. Таким образом, можно измениться один или обе из размерностей сигнала задержки после вызова алгоритма. Однако объект должен убедиться, что получившееся количество выходных каналов остается постоянным. Сигнал задержки может быть скаляром, вектором, матрицей или массивом N-D.
release(vfd); vfd(randn(512,2),randn(512,2)); vfd(randn(128,2),[1.4 1.7]); vfd(randn(256,2),randn(256,1)); vfd(randn(128,2),1.4);
В каждом из этих случаев количество выходных каналов равняется 2. Чтобы применить различные задержки на входной сигнал, выпустите объект.
release(vfd); vfd(randn(256,1),randn(256,7)); vfd(randn(512,1),randn(512,7)); vfd(randn(100,1),randn(100,7)); vfd(randn(100,1),randn(1,7));
Выход в каждом из этих случаев [256 7], [512 7], [100 7], и [100 7], соответственно.
Указания и ограничения по применению:
Смотрите системные объекты в Генерации кода MATLAB (MATLAB Coder).
Схемы в следующих разделах показывают типы данных, используемые в dsp.VariableFractionalDelay объект для сигналов фиксированной точки.
Несмотря на то, что можно задать большинство этих типов данных, следующие типы данных вычисляются внутренне объектом и не могут быть непосредственно заданы на интерфейсе объекта.
| Тип данных | Размер слова | Дробная длина |
|---|---|---|
| тип данных VF | Тот же размер слова как коэффициенты | То же самое как размер слова |
| Тип данных HoldInteger | Тот же размер слова как входное значение задержки | 0 |
| Целочисленный тип данных | 32 | 0 |
Примечание
Когда вход является фиксированной точкой, все внутренние типы данных являются подписанной фиксированной точкой.
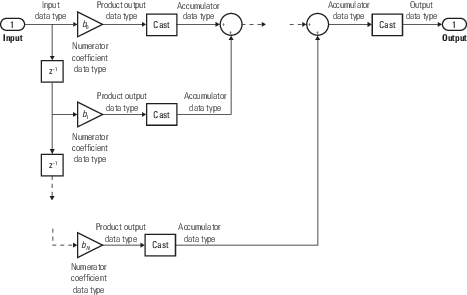
Следующая схема показывает типы данных с фиксированной точкой, используемые режимом Линейной интерполяции переменного дробного алгоритма задержки.

Следующая схема иллюстрирует, как переменный дробный объект задержки выбирает руку многофазной структуры фильтра, которая наиболее тесно совпадает с дробным значением задержки (vf).

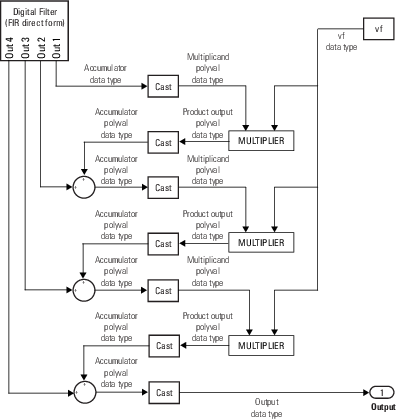
Следующая схема показывает типы данных с фиксированной точкой, используемые переменным дробным алгоритмом задержки в КИХ-режиме интерполяции.
Можно установить коэффициент, продукт выход, аккумулятор и типы выходных данных в объекте. Эта схема показывает, что входные данные хранятся во входном буфере с совпадающим типом данных и масштабирующийся как вход. Объектно-ориентированная память отфильтровала данные и любые начальные условия в буфере вывода с помощью типа выходных данных, и масштабируя это вы устанавливаете.
Когда по крайней мере одни из входных параметров ко множителю действительны, выход множителя находится в типе выходных данных продукта. Когда оба входных параметров ко множителю являются комплексными, результат умножения находится в типе данных аккумулятора. Для получения дополнительной информации на комплексном умножении, смотрите Типы данных Умножения.
Следующая схема показывает типы данных с фиксированной точкой, используемые режимом интерполяции Фэрроу когда:
Неоплодотворенная длина фильтра установлена в 4
Неоплодотворенное маленькое действие задержки установлено в 'Clip to the minimum value necessary for centered kernel'
Следующая схема показывает типы данных с фиксированной точкой, используемые режимом интерполяции Фэрроу когда:
Неоплодотворенная длина фильтра установлена в 4
Неоплодотворенное маленькое действие задержки установлено в 'Use off-centered kernel'
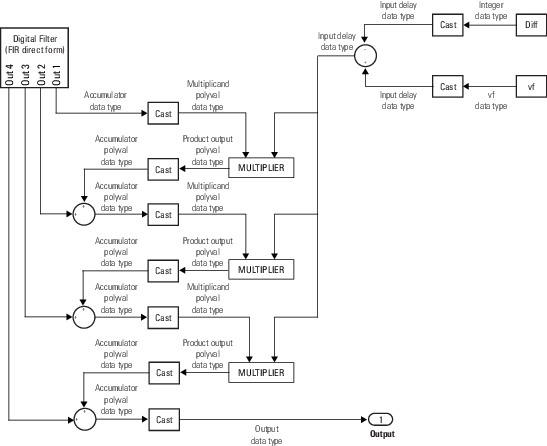
Diff вычисляется из целой части значения задержки (vi) и неоплодотворенная длина фильтра (N) согласно следующему уравнению:
Следующая схема показывает типы данных с фиксированной точкой, используемые КИХ прямой фильтр формы.