Имитационная модель IMU
imuSensor Система object™ модели, получающие данные из инерциального измерительного блока (IMU).
Смоделировать IMU:
Создайте imuSensor объект и набор его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты?.
IMU = imuSensorIMU, это вычисляет инерционный модуль измерения, читающий на основе инерционного входного сигнала. IMU имеет идеальный акселерометр и гироскоп.
IMU = imuSensor( возвращает 'accel-gyro')imuSensor Системный объект с идеальным акселерометром и гироскопом. imuSensor и imuSensor('accel-gyro') эквивалентные синтаксисы создания.
IMU = imuSensor( возвращает 'accel-mag')imuSensor Системный объект с идеальным акселерометром и магнитометром.
IMU = imuSensor( возвращает 'accel-gyro-mag')imuSensor Системный объект с идеальным акселерометром, гироскопом и магнитометром.
IMU = imuSensor(___, возвращает 'ReferenceFrame',RF)imuSensor Системный объект, который вычисляет инерционный модуль измерения, читающий относительно системы координат RF. Задайте RF как 'NED' (Северо-восток вниз) или 'ENU' (Восточный Север). Значением по умолчанию является 'NED'.
IMU = imuSensor(___, наборы каждое свойство Name,Value)Name к заданному Value. Незаданные свойства имеют значения по умолчанию. Этот синтаксис может использоваться в сочетании с любым из предыдущих входных параметров.
[ генерирует акселерометр и показания гироскопа от входных параметров скорости вращения и ускорения.accelReadings,gyroReadings] = IMU(acc,angVel)
Этот синтаксис только допустим если IMUType установлен в 'accel-gyro' или 'accel-gyro-mag'.
[ генерирует акселерометр и показания гироскопа от ускорения, скорости вращения и входных параметров ориентации.accelReadings,gyroReadings] = IMU(acc,angVel,orientation)
Этот синтаксис только допустим если IMUType установлен в 'accel-gyro' или 'accel-gyro-mag'.
[ генерирует показания акселерометра и магнитометра от входных параметров скорости вращения и ускорения.accelReadings,magReadings] = IMU(acc,angVel)
Этот синтаксис только допустим если IMUType установлен в 'accel-mag'.
[ генерирует показания акселерометра и магнитометра от ускорения, скорости вращения и входных параметров ориентации.accelReadings,magReadings] = IMU(acc,angVel,orientation)
Этот синтаксис только допустим если IMUType установлен в 'accel-mag'.
[ генерирует акселерометр, гироскоп и показания магнитометра от входных параметров скорости вращения и ускорения.accelReadings,gyroReadings,magReadings] = IMU(acc,angVel)
Этот синтаксис только допустим если IMUType установлен в 'accel-gyro-mag'.
[ генерирует акселерометр, гироскоп и показания магнитометра от ускорения, скорости вращения и входных параметров ориентации.accelReadings,gyroReadings,magReadings] = IMU(acc,angVel,orientation)
Этот синтаксис только допустим если IMUType установлен в 'accel-gyro-mag'.
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
imuSensor Системный объектimuSensor Система object™ позволяет вам смоделировать данные, полученные от инерционного модуля измерения, состоящего из комбинации гироскопа, акселерометра и магнитометра.
Создайте imuSensor по умолчанию объект.
IMU = imuSensor
IMU =
imuSensor with properties:
IMUType: 'accel-gyro'
SampleRate: 100
Temperature: 25
Accelerometer: [1x1 accelparams]
Gyroscope: [1x1 gyroparams]
RandomStream: 'Global stream'
imuSensor объект, IMU, содержит идеализированный гироскоп и акселерометр. Используйте запись через точку, чтобы просмотреть свойства гироскопа.
IMU.Gyroscope
ans =
gyroparams with properties:
MeasurementRange: Inf rad/s
Resolution: 0 (rad/s)/LSB
ConstantBias: [0 0 0] rad/s
AxesMisalignment: [0 0 0] %
NoiseDensity: [0 0 0] (rad/s)/√Hz
BiasInstability: [0 0 0] rad/s
RandomWalk: [0 0 0] (rad/s)*√Hz
TemperatureBias: [0 0 0] (rad/s)/°C
TemperatureScaleFactor: [0 0 0] %/°C
AccelerationBias: [0 0 0] (rad/s)/(m/s²)
Свойства датчика заданы соответствующими объектами параметра. Например, модель гироскопа используется imuSensor задан экземпляром gyroparams класс. Можно изменить свойства модели гироскопа, использующей запись через точку. Установите область значений измерения гироскопа на 4,3 рад/с.
IMU.Gyroscope.MeasurementRange = 4.3;
Можно также установить свойства датчика задать объекты параметра. Создайте accelparams возразите, чтобы подражать определенному оборудованию, и затем установить Accelerometer IMU свойство к accelparams объект. Отобразите Accelerometer свойство проверить свойства правильно установлено.
SpecSheet1 = accelparams( ... 'MeasurementRange',19.62, ... 'Resolution',0.00059875, ... 'ConstantBias',0.4905, ... 'AxesMisalignment',2, ... 'NoiseDensity',0.003924, ... 'BiasInstability',0, ... 'TemperatureBias', [0.34335 0.34335 0.5886], ... 'TemperatureScaleFactor', 0.02); IMU.Accelerometer = SpecSheet1; IMU.Accelerometer
ans =
accelparams with properties:
MeasurementRange: 19.62 m/s²
Resolution: 0.00059875 (m/s²)/LSB
ConstantBias: [0.4905 0.4905 0.4905] m/s²
AxesMisalignment: [2 2 2] %
NoiseDensity: [0.003924 0.003924 0.003924] (m/s²)/√Hz
BiasInstability: [0 0 0] m/s²
RandomWalk: [0 0 0] (m/s²)*√Hz
TemperatureBias: [0.34335 0.34335 0.5886] (m/s²)/°C
TemperatureScaleFactor: [0.02 0.02 0.02] %/°C
Используйте imuSensor Система object™ к модели, получающей данные из стационарного идеального IMU, содержащего акселерометр, гироскоп и магнитометр.
Создайте идеальную модель датчика IMU, которая содержит акселерометр, гироскоп и магнитометр.
IMU = imuSensor('accel-gyro-mag')IMU =
imuSensor with properties:
IMUType: 'accel-gyro-mag'
SampleRate: 100
Temperature: 25
MagneticField: [27.5550 -2.4169 -16.0849]
Accelerometer: [1x1 accelparams]
Gyroscope: [1x1 gyroparams]
Magnetometer: [1x1 magparams]
RandomStream: 'Global stream'
Задайте основную истину, базовое движение IMU, который вы моделируете. Ускорение и скорость вращения заданы относительно локальной системы координат NED.
numSamples = 1000; acceleration = zeros(numSamples,3); angularVelocity = zeros(numSamples,3);
Вызовите IMU с ускорением основной истины и скоростью вращения. Объектные выходные показания акселерометра, показания гироскопа и показания магнитометра, как смоделировано свойствами imuSensor Системный объект. Показания акселерометра, показания гироскопа и показания магнитометра относительно системы координат корпуса датчика IMU.
[accelReading,gyroReading,magReading] = IMU(acceleration,angularVelocity);
Постройте показания акселерометра, показания гироскопа и показания магнитометра.
t = (0:(numSamples-1))/IMU.SampleRate; subplot(3,1,1) plot(t,accelReading) legend('X-axis','Y-axis','Z-axis') title('Accelerometer Readings') ylabel('Acceleration (m/s^2)') subplot(3,1,2) plot(t,gyroReading) legend('X-axis','Y-axis','Z-axis') title('Gyroscope Readings') ylabel('Angular Velocity (rad/s)') subplot(3,1,3) plot(t,magReading) legend('X-axis','Y-axis','Z-axis') title('Magnetometer Readings') xlabel('Time (s)') ylabel('Magnetic Field (uT)')

Ориентация не задана, и движение основной истины стационарное, таким образом, система координат корпуса датчика IMU и локальное перекрытие системы координат NED для целой симуляции.
Показания акселерометра: ось z корпуса датчика соответствует Вниз-оси. Ускорение на 9,8 м/с^2 вдоль оси z происходит из-за силы тяжести.
Показания гироскопа: показания гироскопа являются нулем вдоль каждой оси, как ожидалось.
Показания магнитометра: Поскольку система координат корпуса датчика выравнивается с локальной системой координат NED, показания магнитометра соответствуют MagneticField свойство imuSensor. MagneticField свойство задано в локальной системе координат NED.
Используйте imuSensor к данным модели, полученным из вращения IMU, содержащий идеальный акселерометр и идеальный магнитометр. Используйте kinematicTrajectory задавать движение основной истины. Плавьте imuSensor выход модели с помощью ecompass функция, чтобы определять ориентацию в зависимости от времени.
Задайте движение основной истины для платформы, которая вращает 360 градусов за четыре секунды, и затем еще 360 градусов за две секунды. Используйте kinematicTrajectory выводить ориентацию, ускорение и скорость вращения в системе координат NED.
fs = 100;
firstLoopNumSamples = fs*4;
secondLoopNumSamples = fs*2;
totalNumSamples = firstLoopNumSamples + secondLoopNumSamples;
traj = kinematicTrajectory('SampleRate',fs);
accBody = zeros(totalNumSamples,3);
angVelBody = zeros(totalNumSamples,3);
angVelBody(1:firstLoopNumSamples,3) = (2*pi)/4;
angVelBody(firstLoopNumSamples+1:end,3) = (2*pi)/2;
[~,orientationNED,~,accNED,angVelNED] = traj(accBody,angVelBody);Создайте imuSensor объект с идеальным акселерометром и идеальным магнитометром. Вызовите IMU с ускорением основной истины, скоростью вращения и ориентацией, чтобы вывести показания акселерометра и показания магнитометра. Постройте график результатов.
IMU = imuSensor('accel-mag','SampleRate',fs); [accelReadings,magReadings] = IMU(accNED,angVelNED,orientationNED); figure(1) t = (0:(totalNumSamples-1))/fs; subplot(2,1,1) plot(t,accelReadings) legend('X-axis','Y-axis','Z-axis') ylabel('Acceleration (m/s^2)') title('Accelerometer Readings') subplot(2,1,2) plot(t,magReadings) legend('X-axis','Y-axis','Z-axis') ylabel('Magnetic Field (\muT)') xlabel('Time (s)') title('Magnetometer Readings')

Показания акселерометра указывают, что платформа не имеет никакого перевода. Показания магнитометра указывают, что платформа вращается вокруг оси z.
Подайте показания акселерометра и магнитометра в ecompass функционируйте, чтобы оценивать ориентацию в зависимости от времени. ecompass функция возвращает ориентацию в формате кватерниона. Преобразуйте ориентацию в Углы Эйлера и постройте результаты. График ориентации показывает, что платформа вращается об оси z только.
orientation = ecompass(accelReadings,magReadings); orientationEuler = eulerd(orientation,'ZYX','frame'); figure(2) plot(t,orientationEuler) legend('Z-axis','Y-axis','X-axis') xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation')

Используйте imuSensor к данным модели, полученным из вращения IMU, содержащий реалистический акселерометр и реалистический магнитометр. Используйте kinematicTrajectory задавать движение основной истины. Плавьте imuSensor выход модели с помощью ecompass функция, чтобы определять ориентацию в зависимости от времени.
Задайте движение основной истины для платформы, которая вращает 360 градусов за четыре секунды, и затем еще 360 градусов за две секунды. Используйте kinematicTrajectory выводить ориентацию, ускорение и скорость вращения в системе координат NED.
fs = 100;
firstLoopNumSamples = fs*4;
secondLoopNumSamples = fs*2;
totalNumSamples = firstLoopNumSamples + secondLoopNumSamples;
traj = kinematicTrajectory('SampleRate',fs);
accBody = zeros(totalNumSamples,3);
angVelBody = zeros(totalNumSamples,3);
angVelBody(1:firstLoopNumSamples,3) = (2*pi)/4;
angVelBody(firstLoopNumSamples+1:end,3) = (2*pi)/2;
[~,orientationNED,~,accNED,angVelNED] = traj(accBody,angVelBody);Создайте imuSensor объект с реалистическим акселерометром и реалистическим магнитометром. Вызовите IMU с ускорением основной истины, скоростью вращения и ориентацией, чтобы вывести показания акселерометра и показания магнитометра. Постройте график результатов.
IMU = imuSensor('accel-mag','SampleRate',fs); IMU.Accelerometer = accelparams( ... 'MeasurementRange',19.62, ... % m/s^2 'Resolution',0.0023936, ... % m/s^2 / LSB 'TemperatureScaleFactor',0.008, ... % % / degree C 'ConstantBias',0.1962, ... % m/s^2 'TemperatureBias',0.0014715, ... % m/s^2 / degree C 'NoiseDensity',0.0012361); % m/s^2 / Hz^(1/2) IMU.Magnetometer = magparams( ... 'MeasurementRange',1200, ... % uT 'Resolution',0.1, ... % uT / LSB 'TemperatureScaleFactor',0.1, ... % % / degree C 'ConstantBias',1, ... % uT 'TemperatureBias',[0.8 0.8 2.4], ... % uT / degree C 'NoiseDensity',[0.6 0.6 0.9]/sqrt(100)); % uT / Hz^(1/2) [accelReadings,magReadings] = IMU(accNED,angVelNED,orientationNED); figure(1) t = (0:(totalNumSamples-1))/fs; subplot(2,1,1) plot(t,accelReadings) legend('X-axis','Y-axis','Z-axis') ylabel('Acceleration (m/s^2)') title('Accelerometer Readings') subplot(2,1,2) plot(t,magReadings) legend('X-axis','Y-axis','Z-axis') ylabel('Magnetic Field (\muT)') xlabel('Time (s)') title('Magnetometer Readings')

Показания акселерометра указывают, что платформа не имеет никакого перевода. Показания магнитометра указывают, что платформа вращается вокруг оси z.
Подайте показания акселерометра и магнитометра в ecompass функционируйте, чтобы оценивать ориентацию в зависимости от времени. ecompass функция возвращает ориентацию в формате кватерниона. Преобразуйте ориентацию в Углы Эйлера и постройте результаты. График ориентации показывает, что платформа вращается об оси z только.
orientation = ecompass(accelReadings,magReadings); orientationEuler = eulerd(orientation,'ZYX','frame'); figure(2) plot(t,orientationEuler) legend('Z-axis','Y-axis','X-axis') xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation')

%Смоделируйте наклон IMU, который содержит акселерометр и гироскоп с помощью imuSensor Система object™. Используйте идеальные и реалистические модели, чтобы сравнить результаты отслеживания ориентации с помощью imufilter Системный объект.
Загрузите struct, описывающий движение основной истины и частоту дискретизации. Struct движения описывает последовательные вращения:
отклонение от курса: 120 градусов более чем две секунды
тангаж: 60 градусов более чем одна секунда
крен: 30 градусов по половине второго
крен:-30 градусов по половине второго
тангаж:-60 градусов более чем одна секунда
отклонение от курса:-120 градусов более чем две секунды
На последней стадии struct движения комбинирует 1-е, 2-е, и 3-и вращения во вращение одно оси. Ускорение, скорость вращения и ориентация заданы в локальной системе координат NED.
load y120p60r30.mat motion fs accNED = motion.Acceleration; angVelNED = motion.AngularVelocity; orientationNED = motion.Orientation; numSamples = size(motion.Orientation,1); t = (0:(numSamples-1)).'/fs;
Создайте идеальный объект датчика IMU и объект фильтра IMU по умолчанию.
IMU = imuSensor('accel-gyro','SampleRate',fs); aFilter = imufilter('SampleRate',fs);
В цикле:
Симулируйте IMU выход путем питания движения основной истины объект датчика IMU.
Отфильтруйте IMU выход с помощью объекта фильтра IMU по умолчанию.
orientation = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientation(i) = aFilter(accelBody,gyroBody); end release(aFilter)
Стройте ориентацию в зависимости от времени.
figure(1) plot(t,eulerd(orientation,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Ideal IMU Data, Default IMU Filter') legend('Z-axis','Y-axis','X-axis')

Измените свойства своего imuSensor смоделировать реальные датчики. Запустите цикл снова и стройте оценку ориентации в зависимости от времени.
IMU.Accelerometer = accelparams( ... 'MeasurementRange',19.62, ... 'Resolution',0.00059875, ... 'ConstantBias',0.4905, ... 'AxesMisalignment',2, ... 'NoiseDensity',0.003924, ... 'BiasInstability',0, ... 'TemperatureBias', [0.34335 0.34335 0.5886], ... 'TemperatureScaleFactor',0.02); IMU.Gyroscope = gyroparams( ... 'MeasurementRange',4.3633, ... 'Resolution',0.00013323, ... 'AxesMisalignment',2, ... 'NoiseDensity',8.7266e-05, ... 'TemperatureBias',0.34907, ... 'TemperatureScaleFactor',0.02, ... 'AccelerationBias',0.00017809, ... 'ConstantBias',[0.3491,0.5,0]); orientationDefault = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientationDefault(i) = aFilter(accelBody,gyroBody); end release(aFilter) figure(2) plot(t,eulerd(orientationDefault,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Realistic IMU Data, Default IMU Filter') legend('Z-axis','Y-axis','X-axis')

Способность imufilter отслеживать достоверные данные значительно уменьшается при моделировании реалистического IMU. Чтобы улучшать производительность, измените свойства своего imufilter объект. Эти значения были определены опытным путем. Запустите цикл снова и стройте оценку ориентации в зависимости от времени.
aFilter.GyroscopeNoise = 7.6154e-7; aFilter.AccelerometerNoise = 0.0015398; aFilter.GyroscopeDriftNoise = 3.0462e-12; aFilter.LinearAccelerationNoise = 0.00096236; aFilter.InitialProcessNoise = aFilter.InitialProcessNoise*10; orientationNondefault = zeros(numSamples,1,'quaternion'); for i = 1:numSamples [accelBody,gyroBody] = IMU(accNED(i,:),angVelNED(i,:),orientationNED(i,:)); orientationNondefault(i) = aFilter(accelBody,gyroBody); end release(aFilter) figure(3) plot(t,eulerd(orientationNondefault,'ZYX','frame')) xlabel('Time (s)') ylabel('Rotation (degrees)') title('Orientation Estimation -- Realistic IMU Data, Nondefault IMU Filter') legend('Z-axis','Y-axis','X-axis')

Определить количество улучшенной производительности модифицированного imufilter, постройте расстояние кватерниона между движением основной истины и ориентацией, как возвращено imufilter со свойствами не по умолчанию и по умолчанию.
qDistDefault = rad2deg(dist(orientationNED,orientationDefault)); qDistNondefault = rad2deg(dist(orientationNED,orientationNondefault)); figure(4) plot(t,[qDistDefault,qDistNondefault]) title('Quaternion Distance from True Orientation') legend('Realistic IMU Data, Default IMU Filter', ... 'Realistic IMU Data, Nondefault IMU Filter') xlabel('Time (s)') ylabel('Quaternion Distance (degrees)')

Модель акселерометра использует ориентацию основной истины и ускоряющие входные параметры и imuSensor и accelparams свойства смоделировать показания акселерометра.
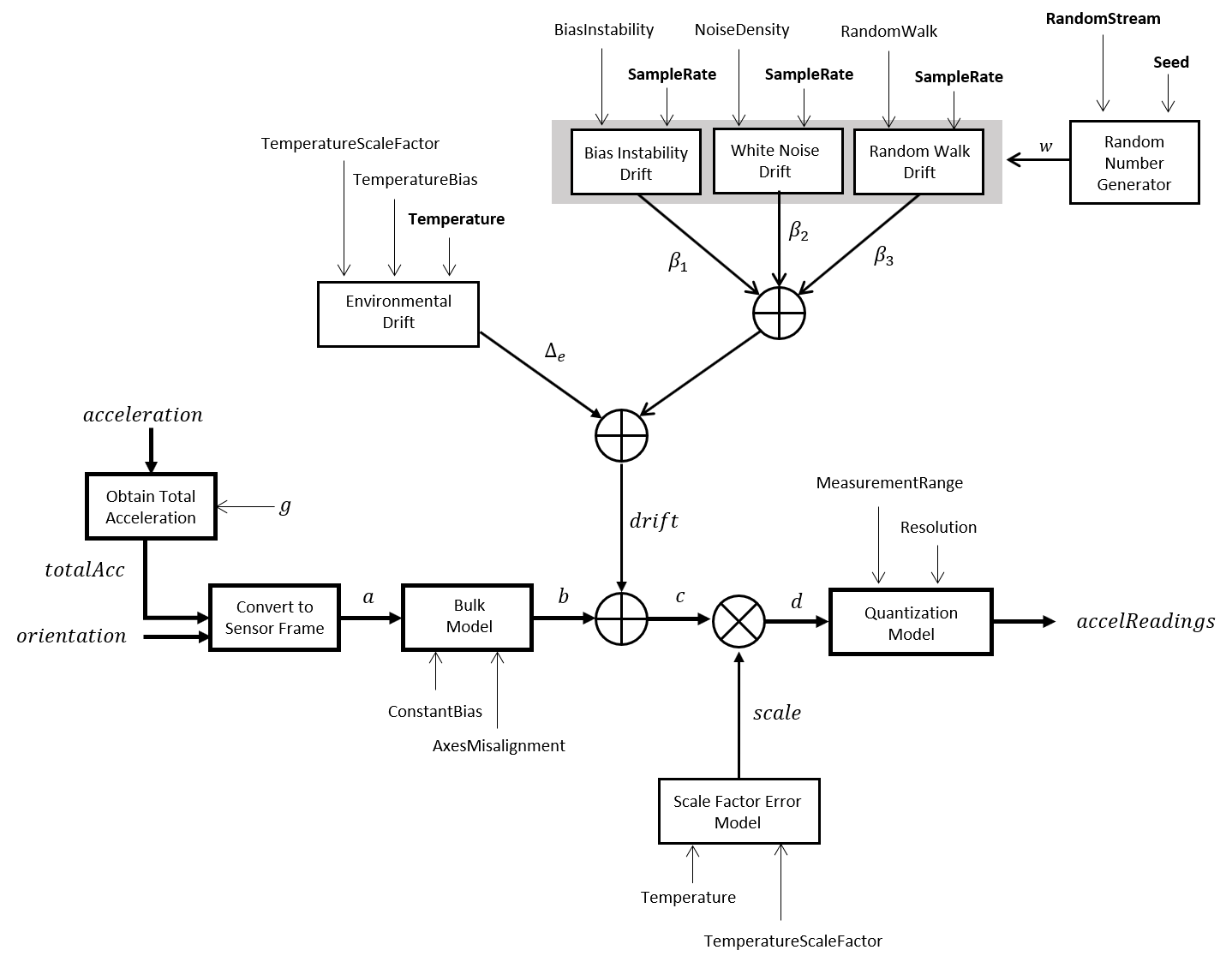
Чтобы получить общее ускорение (totalAcc), ускорение предварительно обрабатывается путем отрицания и добавления силы тяжести постоянный вектор (g = [0; 0; 9.8] m/s2) как:
Затем общее ускорение преобразовано от локальной системы координат навигации до использования системы координат датчика:
Если ориентация вводится в форме кватерниона, она преобразована в матрицу вращения перед обработкой.
Ускорение основной истины в системе координат датчика, a, проходит через объемную модель, которая добавляет неточное совмещение осей и смещение:
где ConstantBias является свойством accelparams, и α 1, α 2, и α 3 дан первыми, вторыми, и третьими элементами свойства AxesMisalignment accelparams.
Дрейф нестабильности смещения моделируется как белый смещенный шум и затем отфильтрованный:
где BiasInstability является свойством accelparams, и h 1 является фильтром, заданным свойством SampleRate:
Белый шумовой дрейф моделируется путем умножения элементов белого шумового случайного потока стандартным отклонением:
где SampleRate является imuSensor свойством и NoiseDensity является accelparams свойство. Элементами w являются случайные числа, данные настройками imuSensor случайный поток.
Случайный дрейф обхода моделируется путем смещения элементов белого шумового случайного потока и затем фильтрации:
где RandomWalk является свойством accelparams, SampleRate является свойством imuSensor, и h 2 является фильтром, заданным как:
Экологический шум дрейфа моделируется путем умножения перепада температур от стандарта с температурным смещением:
где Температура является свойством imuSensor, и TemperatureBias является свойством accelparams. Постоянные 25 соответствуют стандартной температуре.
Температурная ошибка масштабного коэффициента моделируется как:
где Температура является свойством imuSensor, и TemperatureScaleFactor является свойством accelparams. Постоянные 25 соответствуют стандартной температуре.
Квантование моделируется первым насыщением непрерывной модели сигнала:
и затем установка разрешения:
где MeasurementRange является свойством accelparams.
Модель гироскопа использует ориентацию основной истины, ускорение, и входные параметры скорости вращения и imuSensor и gyroparams свойства смоделировать показания акселерометра.
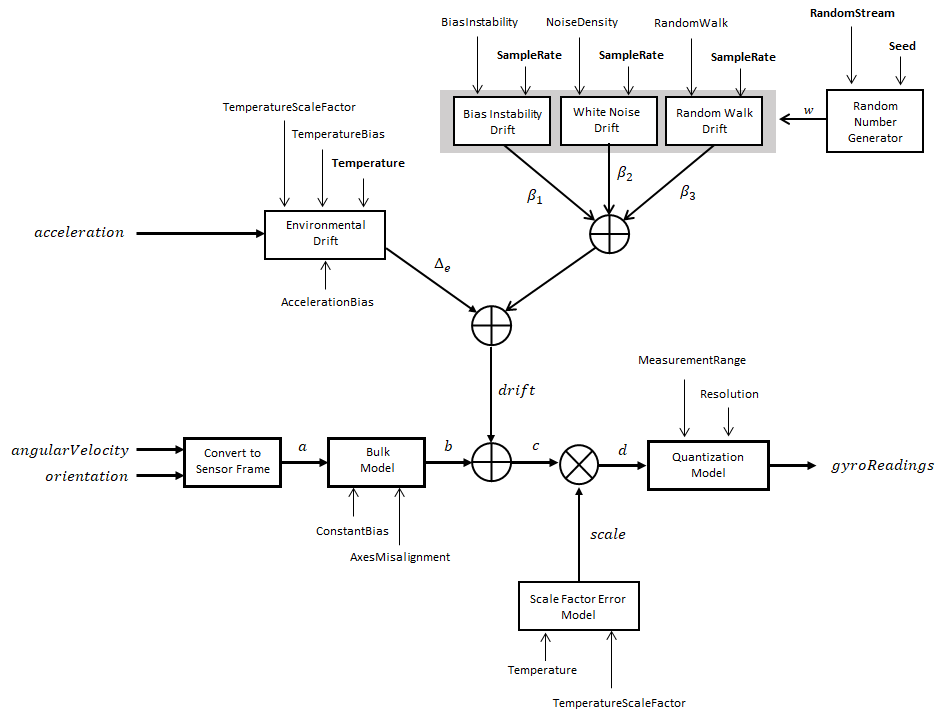
Скорость вращения основной истины преобразована от локальной системы координат до системы координат датчика с помощью ориентации основной истины:
Если ориентация вводится в форме кватерниона, она преобразована в матрицу вращения перед обработкой.
Скорость вращения основной истины в системе координат датчика, a, проходит через объемную модель, которая добавляет неточное совмещение осей и смещение:
где ConstantBias является свойством gyroparams, и α 1, α 2, и α 3 дан первыми, вторыми, и третьими элементами свойства AxesMisalignment gyroparams.
Дрейф нестабильности смещения моделируется как белый смещенный шум и затем отфильтрованный:
где BiasInstability является свойством gyroparams и h 1 является фильтром, заданным свойством SampleRate:
Белый шумовой дрейф моделируется путем умножения элементов белого шумового случайного потока стандартным отклонением:
где SampleRate является imuSensor свойством и NoiseDensity является gyroparams свойство. Элементами w являются случайные числа, данные настройками imuSensor случайный поток.
Случайный дрейф обхода моделируется путем смещения элементов белого шумового случайного потока и затем фильтрации:
где RandomWalk является свойством gyroparams, SampleRate является свойством imuSensor, и h 2 является фильтром, заданным как:
Экологический шум дрейфа моделируется путем умножения перепада температур от стандарта с температурным смещением:
где Температура является свойством imuSensor, и TemperatureBias является свойством gyroparams. Постоянные 25 соответствуют стандартной температуре.
Температурная ошибка масштабного коэффициента моделируется как:
где Температура является свойством imuSensor, и TemperatureScaleFactor является свойством gyroparams. Постоянные 25 соответствуют стандартной температуре.
Квантование моделируется первым насыщением непрерывной модели сигнала:
и затем установка разрешения:
где MeasurementRange является свойством gyroparams.
Модель магнитометра использует ориентацию основной истины и ускоряющие входные параметры и imuSensor и magparams свойства смоделировать показания магнитометра.
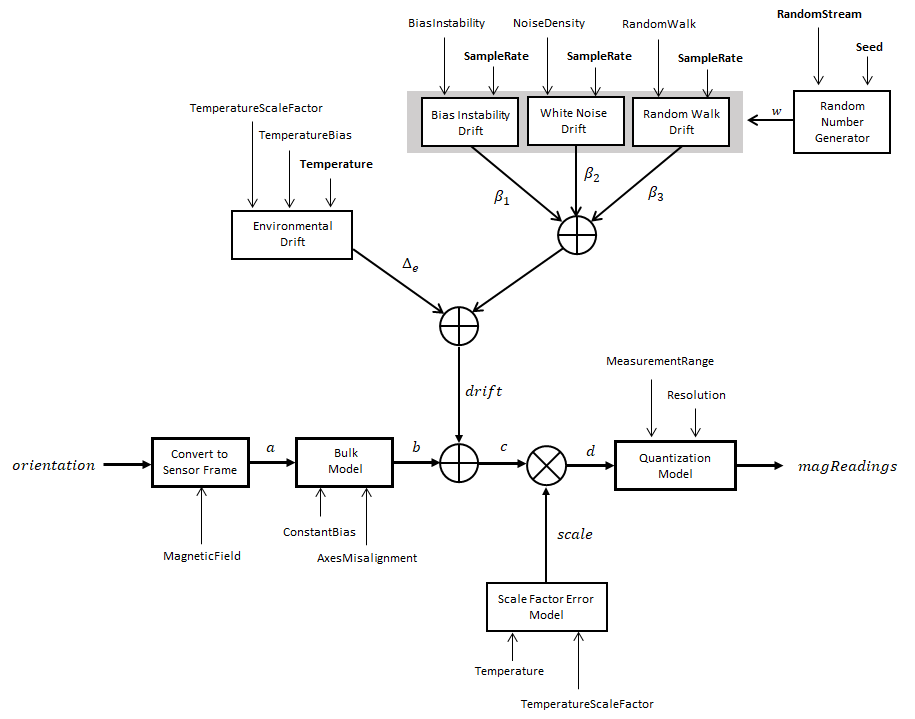
Ускорение основной истины преобразовано от локальной системы координат до системы координат датчика с помощью ориентации основной истины:
Если ориентация вводится в форме кватерниона, она преобразована в матрицу вращения перед обработкой.
Ускорение основной истины в системе координат датчика, a, проходит через объемную модель, которая добавляет неточное совмещение осей и смещение:
где ConstantBias является свойством magparams, и α 1, α 2, и α 3 дан первыми, вторыми, и третьими элементами свойства AxesMisalignment magparams.
Дрейф нестабильности смещения моделируется как белый смещенный шум и затем отфильтрованный:
где BiasInstability является свойством magparams и h 1 является фильтром, заданным свойством SampleRate:
Белый шумовой дрейф моделируется путем умножения элементов белого шумового случайного потока стандартным отклонением:
где SampleRate является imuSensor свойством и NoiseDensity является magparams свойство. Элементами w являются случайные числа, данные настройками imuSensor случайный поток.
Случайный дрейф обхода моделируется путем смещения элементов белого шумового случайного потока и затем фильтрации:
где RandomWalk является свойством magparams, SampleRate является свойством imuSensor, и h 2 является фильтром, заданным как:
Экологический шум дрейфа моделируется путем умножения перепада температур от стандарта с температурным смещением:
где Температура является свойством imuSensor, и TemperatureBias является свойством magparams. Постоянные 25 соответствуют стандартной температуре.
Температурная ошибка масштабного коэффициента моделируется как:
где Температура является свойством imuSensor, и TemperatureScaleFactor является свойством magparams. Постоянные 25 соответствуют стандартной температуре.
Квантование моделируется первым насыщением непрерывной модели сигнала:
и затем установка разрешения:
где MeasurementRange является свойством magparams.
