Выберите Estimate> State Space Models.
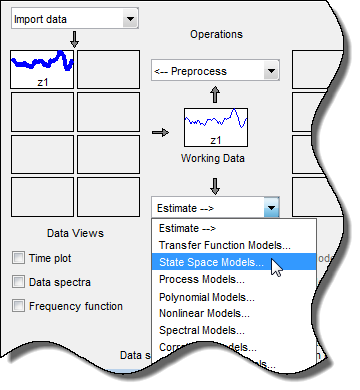
Диалоговое окно State Space Models открывается.
Совет
Для получения дополнительной информации об опциях в диалоговом окне нажмите Help.
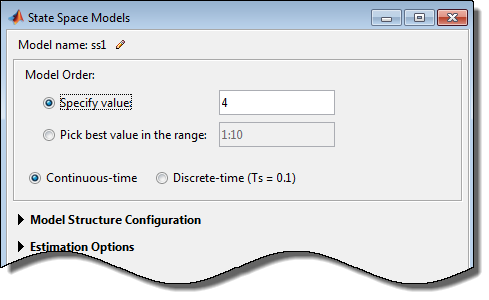
Задайте имя модели путем нажатия![]() смежный с Model name. Имя модели должно быть уникальным в Совете Модели.
смежный с Model name. Имя модели должно быть уникальным в Совете Модели.
Выберите опцию Specify value (если не уже выбранный), и задайте порядок модели в поле редактирования. Порядок модели относится к количеству состояний в модели в пространстве состояний.
Совет
Когда вы не знаете порядка модели, поиска и выбираете порядок. Для получения дополнительной информации см. Оценочную Модель С Выбранным Порядком в Приложении.
Выберите Continuous-time или опцию Discrete-time, чтобы задать тип модели, чтобы оценить.
Вы не можете оценить модель дискретного времени, если рабочие данные являются данными частотного диапазона непрерывного времени.
Расширьте раздел Model Structure Configuration, чтобы выбрать структуру модели, такую как каноническая форма, оценить ли компонент воздействия (матрица K) и спецификация сквозного соединения и ввести задержки.
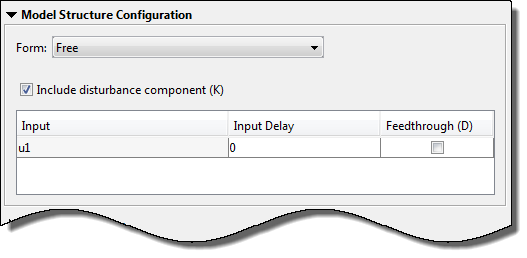
Для получения дополнительной информации о типе параметризации пространства состояний, смотрите Поддерживаемую Параметризацию Пространства состояний.
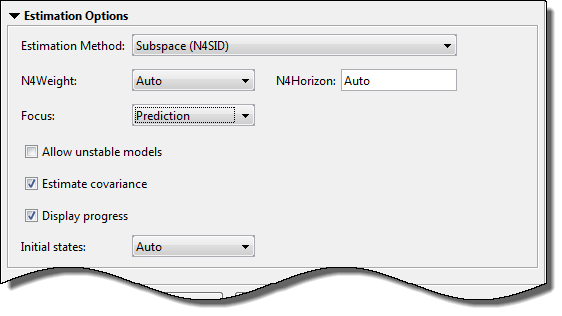
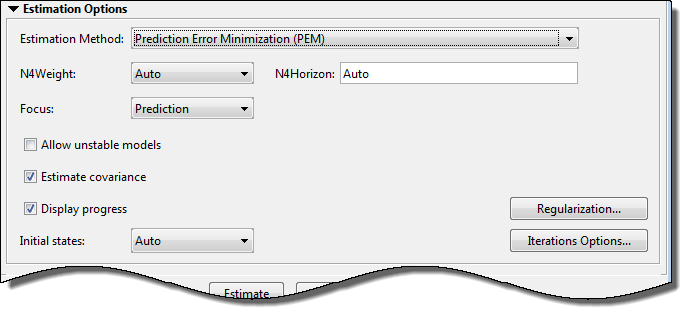
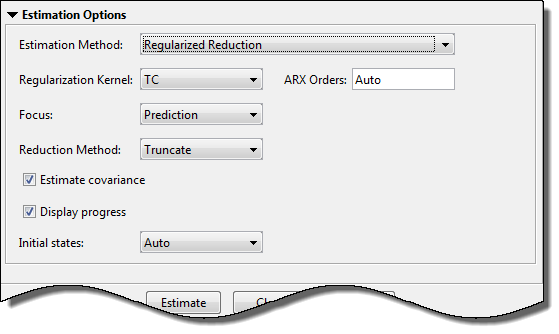
Расширьте раздел Estimation Options, чтобы выбрать метод оценки и сконфигурировать функцию стоимости.
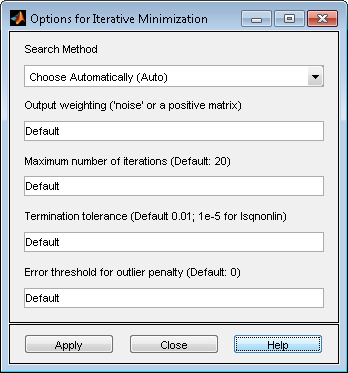
Выберите один из следующего Estimation Method из выпадающего списка и сконфигурируйте опции. Для получения дополнительной информации об этих методах, смотрите Методы оценки Модели в пространстве состояний.
Нажмите Estimate, чтобы оценить модель. Новая модель добавляется к приложению System Identification.
Можно задать, как алгоритм оценки взвешивает подгонку на различных частотах. В приложении, набор Focus к одной из следующих опций:
Prediction — Использует инверсию шумовой модели H, чтобы взвесить относительную важность того, как тесно приспособить данные в различных частотных диапазонах. Соответствует минимизации предсказания "один шаг вперед", который обычно способствует подгонке на кратковременном интервале. Оптимизированный для выходных приложений предсказания.
Simulation — Использует входной спектр, чтобы взвесить относительную важность подгонки в определенном частотном диапазоне. Не использует шумовую модель, чтобы взвесить относительную важность того, как тесно приспособить данные в различных частотных диапазонах. Оптимизированный для выходных приложений симуляции.
Stability — Оценивает лучшую устойчивую модель. Для получения дополнительной информации об устойчивости модели, см. Нестабильные Модели.
Filter — Задайте пользовательский фильтр, чтобы открыть диалоговое окно Estimation Focus, где можно ввести фильтр, как описано в Простом Фильтре Полосы пропускания или Определении Пользовательского Фильтра. Эта предварительная фильтрация применяется только для оценки, что динамика от входа выводит. Возмущение определяется из данных об оценке.