Несколько явных контроллеров MPC
Model Predictive Control Toolbox
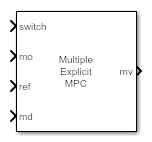
Блок Multiple Explicit MPC Controllers использует следующие входные сигналы:
Измеренный объект выходные параметры (mo)
Ссылка или заданное значение (ref)
Измеренное воздействие объекта (md), если любой
Переключение сигнала (switch)
Блок Multiple Explicit MPC Controllers позволяет переходу между несколькими явными контроллерами MPC в режиме реального времени на основе текущих условий работы. Как правило, вы проектируете каждый контроллер для конкретной области операционного пробела. Используя доступные измерения, вы обнаруживаете текущую операционную область и выбираете соответствующий активный контроллер с помощью switch импорт.
Переключающийся сигнал выбирает активный контроллер среди списка двух или больше кандидатов явные контроллеры MPC. Эти контроллеры уменьшают онлайновое вычислительное усилие при помощи закона о надзоре поиска по таблице во время каждого контрольного интервала вместо того, чтобы решить задачу квадратичного программирования. Для получения дополнительной информации смотрите Explicit MPC Controller.
Чтобы повысить эффективность, неактивные контроллеры не оценивают свой закон о надзоре. Однако, чтобы обеспечить передачу bumpless между контроллерами, неактивные контроллеры продолжают выполнять оценку состояния.
Как для блока Multiple MPC Controllers, вы не можете отключить оценку для блока Multiple Explicit MPC Controllers. Один контроллер должен всегда быть активным.
Как блок Explicit MPC Controller, блок Multiple Explicit MPC Controllers поддерживает только подмножество дополнительных функций MPC, как обрисовано в общих чертах в следующей таблице.
| Поддерживавшие функции | Неподдерживаемые функции |
|---|---|
|
|
