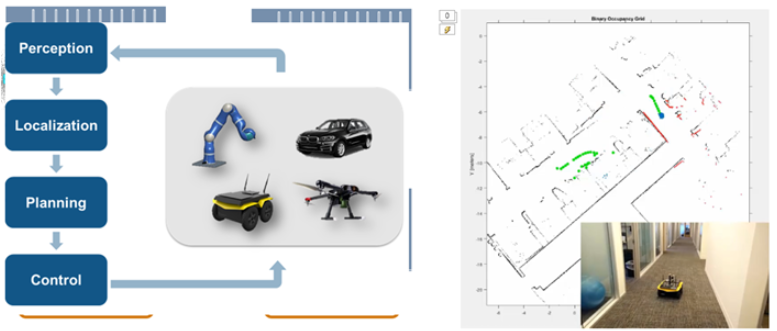
Navigation Toolbox™ предоставляет алгоритмы и аналитические инструменты для разработки планирования движения и систем навигации. Тулбокс содержит настраиваемых поисковых и основанных на выборке планировщиков пути. Это также содержит модели датчика и алгоритмы для оценки положения мультидатчика. Можно создать 2D и 3D представления карты с помощью собственных данных или сгенерировать карты с помощью алгоритмов одновременной локализации и картографии (SLAM), включенных в тулбокс. Справочные примеры предусмотрены самоходные и приложения робототехники.
Можно сгенерировать метрики для сравнения оптимальности пути, гладкости и сравнительных тестов эффективности. Разработчик карты SLAM приложение позволяет вам в интерактивном режиме визуализировать и отладить генерацию карты. Можно протестировать алгоритмы путем развертывания их непосредственно в оборудование (с MATLAB® Coder™ или Simulink® Coder).
Этот пример рассматривает концепции в трехмерных вращениях и как кватернионы используются для описания ориентации и поворотов.
В этом примере показано, как симулировать измерения инерциального измерительного блока (IMU) с помощью imuSensor (Sensor Fusion and Tracking Toolbox) Системный объект.
В этом примере показано, как оценить положение и ориентацию наземных транспортных средств путем объединения данных от инерциального измерительного блока (IMU) и приемника системы глобального позиционирования (GPS).
Этот пример демонстрирует, как совпадать с двумя лазерными сканами с помощью алгоритма Преобразования нормальных распределений (NDT) [1].
В этом примере показано, как использовать алгоритм быстро исследующего случайного дерева (RRT), чтобы запланировать путь транспортное средство через известную карту.
Этот пример демонстрирует, как реализовать алгоритм Одновременной локализации и картографии (SLAM) на собранной серии сканов лидара с помощью оптимизации графика положения.
Этот пример демонстрирует, как реализовать алгоритм Одновременной локализации и картографии (SLAM) на собранных 3-D данных о датчике лидара с помощью алгоритмов обработки облака точек и оптимизации графика положения.
Обзор Navigation Toolbox
Узнайте о различной функциональности, поддержанной в Navigation Toolbox
