

Вязкая гидромуфта между вращающимися валами автомобильной трансмиссии
Simscape / Автомобильная трансмиссия / Couplings & Drives

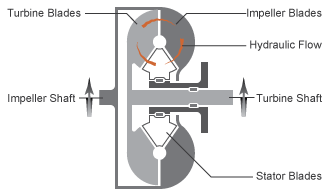
Блок Torque Converter моделирует гидротрансформатор. Блок Torque Converter имеет два порта сохранения вращательного механического устройства, которые сопоставлены с рабочим колесом и турбиной, соответственно. Крутящий момент поблочных передач и скорость вращения между портом I рабочего колеса и турбинным портом T путем действия как интерполяционная таблица. Блок может симулировать диск (потоки энергии от порта I до порта T) и побережье (потоки энергии от порта T до порта I) режимы.
Когда Coast mode modeling установлен в Continuous:
Вал рабочего колеса должен всегда вращаться в положительном направлении. Симуляция не допустима для < 0.
Если вы управляете блоком Torque Converter при помощи источника крутящего момента, такого как блок Generic Engine, необходимо включать инерцию в источник, чтобы представлять механизм, инерцию вала или другие исходные компоненты. Чтобы гарантировать, что рабочее колесо запускается путем вращения в положительном направлении, устанавливает начальную скорость для этой инерции к положительному значению.
[1] Ассоциация инженеров автомобилестроения, гидродинамический тестовый код диска (поверхностные методические рекомендации транспортного средства), SAE J643, декабрь 2018.


