

Колесо, соединённое с ремнём для передачи крутящего момента и движения
Simscape / Мультитело / Пояса и Кабели

Блок Pulley представляет или имеющее зубы соединённое с ремнём колесо с канавками, расположение, используемое часто в передаче крутящего момента и движения частично для механического преимущества, которое это может обеспечить. Шкив (или звездочка, если имеющий зубы) идеален: невесомый и лишенный трения, с нулевым промахом, разрешенным между его поверхностью и окружающим проводом, самим идеализированным как тугой и нерастяжимый. Используйте шкив отдельно или как часть составной системы шкивов, такой как блок и займитесь подъема или пояса синхронизации автомобильного механизма.
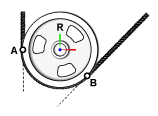
Шкив имеет одну систему координат локальной ссылки (порт R системы координат) и две точки касания провода (порты A и B ремня). Система координат помещается с ее источником в центр шкива и ее оси z вдоль оси вращения того же самого. Точки касания провода совпадают с местоположениями, в которых провод встречается или отделяется от шкива. Эти местоположения могут измениться в процессе моделирования. Пояс или кабель переносят шкив от порта A до порта B, чтобы проследить против часовой стрелки дуга об оси z.
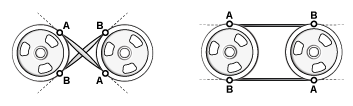
В системе с обратной связью двух шкивов — таких как ременной привод — связи портов ремня определяют, пересечена ли геометрия провода или открыта. Как показано в следующем схематическом, в системе шкивов, в которых оси z выравниваются параллельно, если порт A каждый соединяется с портом A другого, то провод пересечен; если порт A каждый соединяется с портом B другого, то провод открыт. Эффект является тем же самым, если вместо того, чтобы переключить подключения порта, одна из систем координат инвертируется так, чтобы оси z шкивов были антипараллельны.
Степени свободы шкива зависят полностью от соединений и ограничений (если таковые имеются), с которым он соединяется. Присоединение шкива к случаю посредством шарнирного соединения передает шкиву одну вращательную степень свободы относительно случая; каждый затем свободен вращаться относительно другого. Фиксируя шкив к другому шкиву, посредством прямой связи, твердое преобразование или сварной шов, ограничивает два так, чтобы, если вы вращаетесь, то так должен другой.
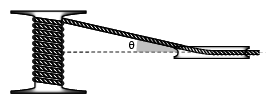
По умолчанию провод может ввести и выйти из шкива под углом к его центральной плоскости (θ на рисунке). Этот угол может варьироваться в процессе моделирования — например, из-за перевода шкива на призматическом соединении. В то время как контактная точка всегда находится в центральной плоскости шкива, шкив может переместиться, когда смонтировано в соединение. Провод может также быть ограничен ввести и выйти из шкива в его центральной плоскости. Осуществляется ли это ограничение, зависит от настроек блока Belt-Cable Properties.
Шкивы должны остаться на расстояниях, которые сохраняют естественную длину провода. Эта длина вычисляется из исходных размещений шкивов, и она фиксируется: провод не может ни расширить, ни ослабить в процессе моделирования. Расчеты длины включают длины дуги провода о шкивах. Контакт между ними идеализирован как slipless с контактной точкой на проводе, всегда перемещающемся в ту же мгновенную скорость как ее дубликат на шкиве.
Обратите внимание на то, что система координат и порты ремня принадлежат различным областям мультитела. Как правило, порты соединяются только, чтобы любить порты — порты системы координат к другим портам системы координат, портам ремня к другим портам ремня. Область ремня имеет особое требование, чтобы каждая сеть или линии связи ремня соединили с одной (и не больше, чем одной) блок Belt-Cable Properties. Именно через тот блок визуализация провода сконфигурирована, и длина того же самого (на обновлении схемы) вычислена.
Визуализация провода в форме линии подачи. Провод встречается и отделяется от касательной шкива до ее окружности. Дуга контакта между проводом и шкивом называется дугой подачи. Линия подачи провода является суммой линейных сегментов между различными шкивами и их соответствующих дуг подачи. Линейные сегменты между шкивами показывают как прямолинейные, сопоставимые с ограничением, что никакому ослаблению не позволяют произойти.
Объедините блок Pulley с блоком Belt-Cable Spool, чтобы получить из лебедки и возвратиться к нему, дополнительные длины провода. Пример приложения является понижением и повышением крюкового блока подъемного крана башни. Используйте блок Belt-Cable End, чтобы задать конечную точку к проводу. Конечная точка содержит систему координат для связи с загрузкой, фиксатором или другой частью модели мультитела.
Pitch Radius — Расстояние от центра шкива к центральной линии провода10 cm (значение по умолчанию) | положительная скалярная величина в единицах длиныРасстояние от центра шкива к средней линии провода в любой точке контакта. В составных системах шкивов различия в радиусах подачи часто определяют отношение, в котором уменьшается скорость, или крутящий момент увеличивается.
Initial Wrap Angle — Минимальный угол переноса шкива в начале симуляции0.0 deg (значение по умолчанию) | положительная скалярная величина в градусахLower Bound — Задайте нижнюю границу на начальном углу переноса шкива. Угол переноса в начале моделирования больше или равен этому заданному значению.
Sensing — Выбор кинематических переменных, чтобы распознатьсяUnchecked (значение по умолчанию) | ПроверенныйВыбор кинематических переменных, чтобы распознаться. Установите флажок, чтобы осушить порт физического сигнала для соответствующей переменной. Переменные, доступные для обнаружения:
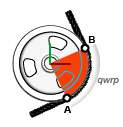
Wrap Angle — Угол от точки контакта, сопоставленной с портом A к сопоставленному с портом B. Этот угол измеряется в центре (xy) плоскость шкива. Это всегда равно или больше, чем нуль с его значением, увеличивающимся 2π для каждого оборота, сделанного против часовой стрелки о локальном z - ось. Используйте порт qwrp для этого измерения.
Рисунок показывает угол переноса между контактными точками (A и B шкива). Система координат локальной ссылки указывает на x - ось (горизонталь) и y - ось (вертикальная) из шкива.
Pulley Angle A — Угол, измеренный в плоскости xy системы координат, от локального x - ось к линии между системой координат и точкой контакта A.
Если точка контакта выше xz - плоскость (в +y-region системы координат), угол положителен. Если точка контакта ниже xz - плоскость, угол отрицателен. Угол является нулем, когда точка контакта, оказывается, находится точно в xz - плоскость.
Угол не является модульным. Вместо того, чтобы ограничиваться к полной области значений — раскручиванию к началу области значений после завершения поворота — измеренное значение изменяется постоянно с повторными поворотами. Каждый поворот, который делает барабан, добавляет (или вычитает), 2π к измерению.
Используйте порт qpa для этого измерения.
Углы шкива A и B

Pulley Angle B — Угол, измеренный в плоскости xy системы координат, от локального x - ось к линии между системой координат и точкой контакта B.
Если точка контакта выше xz - плоскость (в +y-region системы координат), угол положителен. Если точка контакта ниже xz - плоскость, угол отрицателен. Угол является нулем, когда точка контакта, оказывается, находится точно в xz - плоскость.
Угол не является модульным. Вместо того, чтобы ограничиваться к полной области значений — раскручиванию к началу области значений после завершения поворота — измеренное значение изменяется постоянно с повторными поворотами. Каждый поворот, который делает барабан, добавляет (или вычитает), 2π к измерению.
Используйте порт qpb для этого измерения.
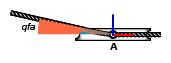
Fleet Angle A — Угол от xy - плоскость системы координат к проводу в точке контакта A. xy - плоскость совпадает с центральной плоскостью барабана.
Если провод приближается к точке контакта от выше xy - плоскость (в +z области системы координат), угол положителен. Если провод приближается снизу, угол отрицателен. Угол является нулем, когда провод приближается к точке контакта в центральной плоскости барабана.
Угол является модульным, который должен сказать, что его значение связано — здесь между-π/2 к + π/2. Эта область значений открыта. Измеренное значение может варьироваться между-π/2 и + π/2, но это не может поразить ни один предел.
Обратите внимание на то, что, если параметр Drum Belt-Cable Alignment блока Belt-Cable Properties устанавливается на Monitored Planar, блок шкива требуется, чтобы быть плоским, и быстроходный угол является поэтому всегда нулем. Чтобы смоделировать неплоский блок, используйте настройку по умолчанию для того параметра: Unrestricted.
Используйте порт qfa для этого измерения.
Флот Энгл А.
Fleet Angle B — Угол от xy - плоскость системы координат к проводу в точке контакта B. xy - плоскость совпадает с центральной плоскостью барабана.
Если провод приближается к точке контакта от выше xy - плоскость (в +z области системы координат), угол положителен. Если провод приближается снизу, угол отрицателен. Угол является нулем, когда провод приближается к точке контакта в центральной плоскости барабана.
Угол является модульным, который должен сказать, что его значение связано — здесь между-π/2 к + π/2. Эта область значений открыта. Измеренное значение может варьироваться между-π/2 и + π/2, но это не может поразить ни один предел.
Обратите внимание на то, что, если параметр Drum Belt-Cable Alignment блока Belt-Cable Properties устанавливается на Monitored Planar, блок шкива требуется, чтобы быть плоским, и быстроходный угол является поэтому всегда нулем. Чтобы смоделировать неплоский блок, используйте настройку по умолчанию для того параметра: Unrestricted.
Используйте порт qfb для этого измерения.