

Программное обеспечение Simscape Multibody принимает много соглашений в своих определениях инерции. Примите во внимание их, когда они могут повлиять на ваши вычисления инерции, если вы выполняете их вручную. Соглашения могут также опереться на то, какая дополнительная обработка, если таковые имеются, ваши потребности данных об инерции — например, если она была получена из приложения CAD или другого стороннего программного обеспечения. В частности:
Продукты инерции заданы с помощью отрицаемого соглашения, один со вставленным знаком "минус", явным образом, в массовых интегралах. Альтернативное соглашение существует, в котором знак "минус" не сопровождает массовые интегралы. Вспомните, что продуктами инерции являются недиагональные элементы матрицы инерции.
Центр массы задан относительно системы координат локальной ссылки блока. В твердых частицах с импортированными формами CAD эта система координат обычно - принятый вашим приложением CAD в его вычислениях инерции. Возможно, однако, изменить файл геометрии тела так, чтобы две системы координат больше не соответствовали.
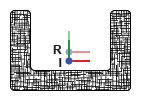
Матрица инерции получает пространственное распределение вопроса о локальной системе координат, упомянутой здесь как система координат инерции разрешения. Эта система координат помечена я на рисунке. Его оси параллельны тем из системы координат локальной ссылки, сопоставленной с портом R системы координат, и соответственно пометили R. Однако его источник совпадает вместо этого с локальным центром массы.
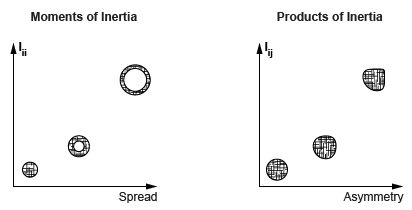
Матрица инерции включает моменты и продукты инерции. Моменты инерции занимают диагональные матричные положения и измеряют дисперсию или распространяются массового распределения об осях системы координат инерции разрешения. Чем больше распространение об оси, тем больше момент инерции, соответствующей той оси.
Продукты инерции занимают недиагональные положения и измеряют асимметрию массового распределения относительно плоскостей системы координат инерции разрешения. Чем больше асимметрия о плоскости, тем больше продукты инерции сопоставлены с любой осью в той плоскости. Фигура иллюстрирует эти отношения.
Матрица симметрична относительно основной диагональной линии: недиагональные элементы, индексы которых являются обратными величинами друг друга, совместно используют то же значение. Это ограничение сокращает количество уникальных продуктов инерции от исходных шести (все те в недиагональных положениях) к трем, что необходимо задать в блоке (те с уникальной комбинацией индексов):
Продукты инерции, I ij, заданы с помощью распространенного, отрицаемого, соглашение, принятое многими приложениями CAD:
где ρ является массовой плотностью, v является объемом, и V является суммарным объемом интегрирования. x, y и координаты z являются Декартовыми компонентами вектора расстояния, охватывающего от центра массы к бесконечно малому элементу массового ρ dv. Моменты инерции, I ii, так же заданы:
Когда применено простые формы, такие как цилиндрические интерпретаторы и прямоугольные лучи, эти определения дают начало известным алгебраическим уравнениям, которые часто публикуются в стандартных технических таблицах. Можно сослаться на такие таблицы при определении параметров инерции явным образом. Полная матрица инерции, согласно соглашению Simscape Multibody:
Моментами инерции являются по определению положительные числа. Однако продукты инерции могут быть или положительными, отрицательными, или нуль. Они - нуль, если оси системы координат инерции разрешения, оказывается, совпадают с основными осями инерции. Моменты инерции затем называются основными моментами инерции, и матрица инерции, как говорят, является диагональной:
Количество нетривиальных элементов матрицы инерции, которые необходимо задать, в этом случае сокращено к три — основные моменты инерции. Поэтому основные оси инерции могут быть удобной системой координат, в которой можно задать элементы матрицы инерции. Это - система координат инерции разрешения, принятого в очень симметричных предварительно установленных формах твердых блоков.
То же самое, однако, обычно не верно для Extruded Solid или форм тела Revolved Solid, ни является им импортированных через файлы STL или ШАГ. В Extruded Solid и формах Revolved Solid, размещение системы координат зависит тесно от того, как вы задаете геометрические поперечные сечения. В импортированных формах это зависит от того, как относительно локальной нулевой координаты конфигурации части были смоделированы.
Как лучшая практика, всегда рассматривайте размещение системы координат инерции разрешения при указывании элементов матрицы инерции явным образом, особенно при использовании твердого блока. Положение системы координат всегда является положением центра массы, но ее ориентация относительно геометрии тела, при использовании твердого блока, не может всегда совпадать с основными осями инерции.
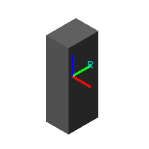
Custom ИнерцияСчитайте прямоугольный луч показанным на рисунке. Определите его массу, центр массы, моменты инерции и продукты инерции. Задайте расчетные параметры явным образом в блоке Brick Solid с помощью Custom параметризация инерции.
Материал и Размерности. Примите конструкцию алюминия и соответствующую массовую плотность 0.09754 lbm/in^3. Используйте размерности луча:
Ширина x = 3 дюйма
Высота y = 4 дюйма
Длина z = 10 дюймов
Подготовьте Модель Луча. Добавьте блок Brick Solid в модель Simscape Multibody. В диалоговом окне блока Brick Solid задайте геометрию луча: установите Geometry> параметр Dimensions к [3 4 10] in. Этот массив соответствует размерностям луча [x
y
z.
Тип геометрии влияет на размещение системы координат локальной ссылки (R) и поэтому сами вычисления инерции. В панели инструментов визуализации нажмите кнопку Toggle visibility of frames. R системы координат расположен в центре массы, и ее оси параллельны размерностям луча (x, y и z).
Задайте Параметры инерции. Вычислите параметры инерции от плотности и размерностей луча. Затем задайте расчетные значения в разделе Inertia параметров блоков Brick Solid:
Mass — Продукт массовой плотности (ρ) и объем (x · y· z:
Center of Mass — Центроидные координаты относительно системы координат локальной ссылки (R):
Moments of Inertia — От стандартных выражений относительно системы координат инерции разрешения (I):
Products of Inertia — От симметрии относительно системы координат инерции разрешения (I):
Приложения CAD часто предоставляют данным об инерции с вашей стороны модели. Примеры включают программное обеспечение SolidWorks, через его инструмент Mass Properties и программное обеспечение Onshape, через его версию того же инструмента. Можно сослаться на эти данные и задать его вручную в среде Simscape Multibody.
Некоторые приложения CAD, SolidWorks среди них, используют альтернативное соглашение инерции задать элементы матрицы инерции. Это соглашение удаляет знак "минус" из определений продукта инерции. I yz продукт инерции, например, становится:
Если ваш источник данных об инерции принимает это соглашение, необходимо явным образом инвертировать продукты инерции прежде, чем задать их значения в среде Simscape Multibody. Как пример, считайте матрицу инерции SolidWorks данной как:
Чтобы правильно задать элементы матрицы в среде Simscape Multibody, необходимо обработать их можно следующим образом:
Вместо того, чтобы ссылаться на данные об инерции в модели блока CAD, можно импортировать ту модель в среду Simscape Multibody. Импорт CAD основан на функции smimport, которая анализирует файл описания мультитела в формате XML и генерирует эквивалентную блок-схему со всеми предварительно заданными параметрами блоков — включенные параметры инерции.
Необходимо экспортировать Модель CAD в допустимом формате XML, означая тот, который соответствует XML-схеме Simscape Multibody, прежде чем можно будет импортировать его. Эта опция может подойти вам, только если у вас есть полная модель блока CAD. Для отдельных частей CAD используйте функцию импорта файла ШАГА твердого блока и установите Inertia> параметр Type к Calculate from Geometry.
Для получения дополнительной информации смотрите Перевод CAD.
Определите параметры инерции для показанной на рисунке формы L-луча. Затем задайте их явным образом в твердом блоке путем установки параметризации инерции на Custom. Используйте массовые данные о свойствах, обеспеченные в этом примере для модели SolidWorks луча.
Откройте Основательную Модель. В командной строке MATLAB введите smdoc_lbeam_inertia. Простая модель открывается блоком File Solid, представляющим тело L-луча. Откройте блок File Solid и исследуйте его параметры Geometry. Геометрия луча импортируется из файла ШАГА, ранее экспортируемого из модели SolidWorks. Эта геометрия показана на рисунке.
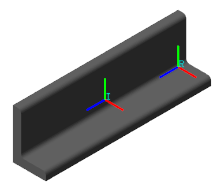
В панели визуализации нажмите кнопку Toggle visibility of frames. Панель визуализации показывает две системы координат, каждый пометил R и другой мной.
R системы координат является системой координат локальной ссылки тела. Это совпадает с тем, что пользователи SolidWorks называют выходной системой координат модели части. Эта система координат расположена в нижнем угле L-формы на одном из двух продольных концов луча. Необходимо задать центр массы относительно этой системы координат.
Структурируйте я - пользовательская твердая система координат, включенная для вашего удобства. Эта система координат совпадает с системой координат инерции разрешения. Его источник находится в центре массы, и его оси параллельны тем из системы координат локальной ссылки. Необходимо задать моменты и продукты инерции относительно этой системы координат.
Рассмотрите Данные SolidWorks. Модель SolidWorks предусматривает часть L-луча следующие массовые данные о свойствах:
Mass properties of l_beam_solid
Configuration: Default
Coordinate system: -- default --
Density = 0.10 pounds per cubic inch
Mass = 2.19 pounds
Volume = 22.41 cubic inches
Surface area = 101.91 square inches
Center of mass: ( inches )
X = 0.58
Y = 1.08
Z = 5.00
Principal axes of inertia and principal moments of inertia:
( pounds * square inches )
Taken at the center of mass.
Ix = ( 0.00, 0.00, 1.00) Px = 2.49
Iy = ( 0.38, -0.92, 0.00) Py = 18.65
Iz = ( 0.92, 0.38, 0.00) Pz = 20.35
Moments of inertia: ( pounds * square inches )
Taken at the center of mass and aligned with
the output coordinate system.
Lxx = 20.10 Lxy = -0.60 Lxz = 0.00
Lyx = -0.60 Lyy = 18.89 Lyz = 0.00
Lzx = 0.00 Lzy = 0.00 Lzz = 2.49
Moments of inertia: ( pounds * square inches )
Taken at the output coordinate system.
Ixx = 77.40 Ixy = 0.76 Ixz = 6.33
Iyx = 0.76 Iyy = 74.39 Iyz = 11.79
Izx = 6.33 Izy = 11.79 Izz = 5.76Данные включают координаты центра массы относительно “выходной системы координат”. Эта система координат совпадает с системой координат локальной ссылки (R) соответствующего тела Simscape Multibody.
Данные включают также матрицу с моментами и продуктами инерции, “взятой в центре массы и выровненной с выходной системой координат”. Эта система координат совпадает с системой координат инерции разрешения (I) тела Simscape Multibody.
Задайте Параметры инерции. Расширьте раздел параметров Inertia диалогового окна блока File Solid. Затем измените параметризацию инерции путем установки Inertia> параметр Type к Custom. Полный набор параметров инерции, кажется, для вас задает.
Установите параметр Mass на 2.19 lb. Это - масса, соответствующая плотности алюминия.
Установите параметр Center of Mass на [0.58 1.08 5.00] in. Это [x
y
z] координаты центра массы, показанной в отчете SolidWorks.
Установите параметр Moments of Inertia на [20.10 18.89 2.49] lbm*in^2. Это [Lxx
Lyy
Lzz] моменты инерции, показанной в отчете SolidWorks.
Установите параметр Products of Inertia на [0 0 0.6] lbm*in^2. Это отрицаемый [Lyz
Lzx
Lxy] продукты инерции, показанной в отчете SolidWorks.
Твердые блоки предоставляют возможность автоматически вычислять большинство параметров инерции, учитывая геометрию тела. Эта опция, доступная от Inertia> Type выпадающий список и по умолчанию на, требует, чтобы вы задали только параметры геометрии и или массовая или массовая плотность.
Блок использует геометрию и массовые параметры, чтобы вычислить остающиеся параметры инерции — центр массы, моменты инерции и продукты инерции — относительно соответствующей системы отсчета. Вычисления основаны на предположении о массовой плотности, которая является постоянной и универсальной.
Можно просмотреть результаты вычисления в твердом блоке в расширяемом разделе под названием Display Inertia. Центру массы дают относительно системы координат локальной ссылки (R), и моменты и продукты инерции относительно системы координат инерции разрешения (I). Это те же системы координат, относительно которых вы можете задать эти параметры.
Сконфигурируйте блок File Solid the smdoc_lbeam_inertia модель, чтобы вычислить параметры инерции от геометрии тела и ее массовой плотности. Затем просмотрите расчетные параметры.
В диалоговом окне блока File Solid переключите Inertia> параметр Type к Calculate from Geometry. Узел Display Inertia появляется ниже параметра Density.
Установите параметр Density на 0.09754 lbm/in^2. Это значение соответствует телу алюминиевой конструкции, и это - то же самое, принятое в данных SolidWorks, обеспеченных в Анализе Данные SolidWorks.
Расширьте узел Display Inertia и нажмите кнопку Update. Параметры инерции под Display Inertia заполняются с расчетными значениями. Сравните их со значениями, введенными в данных о свойствах массы SolidWorks.
