Велосипедная модель транспортного средства
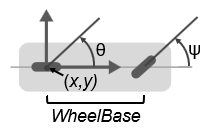
bicycleKinematics создает велосипедную модель транспортного средства, чтобы симулировать упрощенную подобную автомобилю динамику аппарата. Эта модель представляет транспортное средство двумя осями, разделенными расстоянием, WheelBase. Состояние транспортного средства задано как трехэлементный вектор, [x
y
, который theta], с глобальным позиционным xy, задал в метрах, и угле рыскания транспортного средства, theta, заданном в радианах. Переднее колесо может крутиться с держащимся углом psi. Заголовок транспортного средства, theta, задан в центре задней оси. Чтобы вычислить состояния производной времени модели, используйте derivative функция с входными командами и текущим состоянием робота.
kinematicModel = bicycleKinematics
kinematicModel = bicycleKinematics(Name,Value)
derivative | Производная времени состояния транспортного средства |
Создайте робота
Задайте робота и установите начальную стартовую позицию и ориентацию.
kinematicModel = bicycleKinematics; initialState = [0 0 0];
Симулируйте движение робота
Установите промежуток симуляции к 1 с с 0,05 тактами с и входными командами к 2 м/с и левым поворотом. Симулируйте движение робота при помощи ode45 решатель на derivative функция.
tspan = 0:0.05:1;
inputs = [2 pi/4]; %Turn left
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);Постройте путь
figure plot(y(:,1),y(:,2))

[1] Линчуйте, Кевин М. и Франк К. Парк. Современная Робототехника: Механика, Планирование и Управление 1-й редактор Кембридж, MA: Издательство Кембриджского университета, 2017.
