Вычислите подобное автомобилю движение транспортного средства с помощью велосипеда кинематическая модель
Robotics System Toolbox / Мобильные Алгоритмы Робота
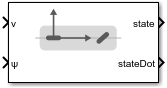
Блок Bicylce Kinematic Model создает велосипедную модель транспортного средства, чтобы симулировать упрощенную подобную автомобилю динамику аппарата. Эта модель представляет транспортное средство двумя осями, заданными длиной между осями, Wheel base. Переднее колесо может крутиться с держащимся углом psi. Транспортное средство, возглавляющее theta задан в центре задней оси.
[1] Линчуйте, Кевин М. и Франк К. Парк. Современная Робототехника: Механика, Планирование и Управление 1-й редактор Кембридж, MA: Издательство Кембриджского университета, 2017.

