Метод μ synthesis расширяет методы H ∞ синтез, чтобы спроектировать устойчивый контроллер для неопределенного объекта. Можно выполнить синтез μ на объектах с неопределенностью параметра, динамической неопределенностью или обоими использованиями musyn команда.
musyn ищет контроллер, который минимизирует устойчивый H ∞ эффективность системы с обратной связью. Устойчивый H ∞ эффективность, также названная μ, определяет количество, как смоделированная неопределенность влияет на эффективность обратной связи. Для получения дополнительной информации о μ и как это вычисляется, смотрите Устойчивый Критерий качества работы для Mu-Synthesis.
Можно использовать musyn к:
Синтезируйте "черный квадрат" неструктурированные устойчивые контроллеры.
Надежно настройте фиксированный порядок или контроллер фиксированной структуры, составленный из настраиваемых компонентов, таких как ПИД-регуляторы, модели в пространстве состояний и статические усиления.
Синтез μ неструктурированных контроллеров походит на синтез контроллера с hinfsyn, за исключением того, что объект включает неопределенность. Как с hinfsyn, вы настраиваете свою проблему как систему с обратной связью CL = lft(P,K), где P объект и K диспетчер должен спроектировать.
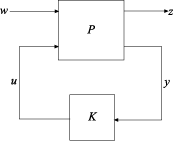
В схеме:
w представляет входные параметры воздействия.
u представляет входные параметры управления.
z представляет ошибку выходные параметры, которые будут сохранены маленьким.
y представляет измерение выходные параметры, предоставленные контроллеру.
Вы создаете неопределенный объект P путем создания модели в пространстве состояний с неопределенными коэффициентами (ureal или ucomplex) блоки, неопределенная динамика (ultidyn блоки), или оба. Создайте объект, таким образом, что измерение, выходными параметрами y являются последние выходные параметры, и входные параметры управления u, является последними входными параметрами. Как с hinfsyn, можно опционально увеличить вводы и выводы объекта с функциями взвешивания (формирующий фильтры цикла), которые представляют цели управления.
Вы затем передаете этот объект musyn, который ищет контроллер K, который минимизирует устойчивый H ∞ эффективность. Контроллер возвращен как модель в пространстве состояний. Для простого примера смотрите Неструктурированного Устойчивого диспетчера Синтезиса на musyn страница с описанием.
Вместо того, чтобы получить контроллер, который является моделью в пространстве состояний свободной формы, можно задать фиксированную структуру контроллера с настраиваемыми параметрами. musyn затем настраивает те параметры, чтобы минимизировать устойчивый H ∞ эффективность системы. синтез μ контроллеров фиксированной структуры походит на контроллер, настраивающийся с hinfstruct, за исключением того, что объект включает неопределенность.
Чтобы настроить вашу проблему для фиксированной структуры синтез μ, вы создаете обобщенное пространство состояний (genss) модель неопределенной системы с обратной связью с настраиваемыми элементами контроллера. Для этого вы создаете и соединяете:
Числовые модели LTI, представляющие фиксированные компоненты системы управления
Неопределенные блоки системы управления, такие как ureal и ultidyn блоки, представляющие неопределенные компоненты объекта
Дополнительные функции взвешивания LTI (формирующий фильтры цикла), которые представляют цели управления
Настраиваемые блоки системы управления, такие как tunablePID, tunableSS, и tunableGain представлять настраиваемые компоненты системы
Для примера, который показывает, как создать такую модель, смотрите, Создают Настраиваемую Модель Системы управления Неопределенными Параметрами.
Вы передаете настраиваемую, неопределенную модель с обратной связью musyn, который ищет значения настраиваемых параметров, которые оптимизируют устойчивый H ∞ эффективность от входных параметров модели до ее выходных параметров. Для простого примера смотрите Устойчивую Настройку Контроллера Фиксированной Структуры на musyn страница с описанием.
Если у вас есть модель Simulink® вашей системы управления, можно использовать slTuner линеаризовать модель заданными неопределенными параметрами и настраиваемыми блоками. Вы затем используете getIOTransfer извлекать genss модель для проектирования контроллера с musyn. Для примера смотрите Неопределенность Модели в Simulink для Устойчивой Настройки.
musyn возвращает устойчивый контроллер K (для неструктурированного контроллера, настраивающегося) или настроенная версия системы управления CL (для контроллера фиксированной структуры, настраивающегося). Это также возвращает лучший достигнутый устойчивый H ∞ эффективность как CLperf выходной аргумент. Это значение говорит вам это с контроллером, возвращенным musyn, пиковое усиление системы с обратной связью остается ниже CLperf по причине неопределенности до 1/CLperf в нормированных единицах. Например:
CLperf = 0,5 средних значения, что усиление с обратной связью остается ниже 0.5 по причине неопределенности до дважды неопределенности, заданной во входной модели. Усиление худшего случая для заданной неопределенности обычно меньше.
CLperf = 2 средних значения, что усиление с обратной связью остается ниже 2 по причине неопределенности до половины неопределенности, заданной в CL. Для этого значения усиление худшего случая для полной заданной неопределенности может быть намного больше. Это может даже быть бесконечно, означая, что система не остается устойчивой по полному спектру заданной неопределенности.
Для более подробной информации об этом количестве и как это вычисляется, смотрите Устойчивый Критерий качества работы для Mu-Synthesis.
Найти K, musyn использует итеративный процесс под названием D-K iteration. Этот процесс решает последовательность масштабированного H ∞ проблемы. Зависимые частотой масштабирования, названные D и масштабированиями G, используют в своих интересах структуру неопределенности. Выполнять итерацию D-K, musyn:
H использования ∞ синтез, чтобы найти контроллер, который минимизирует усиление с обратной связью номинальной системы.
Выполняет анализ робастности, чтобы оценить устойчивый H ∞ эффективность системы с обратной связью. Это количество описывается как масштабированный H ∞ норма, включающая D и масштабирования G (шаг D).
Находит, что новый контроллер минимизирует H ∞ норма, полученная на шаге 2 (шаг K).
Шаги 2 и 3 повторений до устойчивой эффективности прекращают улучшаться.
Для математических деталей о том, как этот алгоритм работает, см. Процесс Итерации D-K.
musyn дает вам два способа контролировать и интерпретировать прогресс алгоритма: отображение по умолчанию и полное отображение.
musyn по умолчаниюПо умолчанию, musyn обеспечивает краткое отображение прогресса алгоритма в командном окне MATLAB®. Например:
DG-K ITERATION SUMMARY:
-------------------------------------------------------------------
Robust performance Fit order
-------------------------------------------------------------------
Iter K Step Peak MU DG Fit D G
1 100 5.747 6.394 10 4
2 5.221 3.433 4.607 10 6
3 2.682 2.263 2.627 10 4
4 1.987 1.687 2.18 10 6
5 1.287 1.192 1.377 10 8
6 1.079 1.087 1.09 10 8
7 1.076 1.046 1.055 8 6
8 1.049 1.024 1.044 10 6
9 1.045 1.022 1.039 8 6
10 1.04 1.023 1.033 8 6
Best achieved robust performance: 1.02
Отображение включает информацию о каждой итерации D-K.
K Step столбец — Для первой итерации, этим значением является H ∞ эффективность номинальной системы с обратной связью после синтеза контроллера. Для остающихся итераций этот столбец показывает масштабированный H ∞ норма после синтеза контроллера.
Peak MU столбец — Устойчивая эффективность (, верхняя граница на μ), поскольку контроллер спроектирован в K Step.
DG fit столбец — Масштабированный H ∞ эффективность после подбора кривой D и масштабированиям G с рациональными функциями.
Fit order столбцы — Порядки рациональной функции раньше приспосабливали масштабирования в той итерации. Если система имеет только комплексную неопределенность, или когда 'MixedMU' опция musynOptions установлен в 'off'то musyn не применяет масштабирование G. В этом случае только порядок подгонки D перечислен.
Если вы видите значительные различия между Peak MU и DG Fit значения в данной итерации, это - знак это musyn не может найти подходящий вариант для масштабирований. В этом случае можно попытаться увеличить максимальный подходящий порядок с помощью 'FitOrder' опция musynOptions.
Для других способов улучшить результаты, смотрите, Улучшают Результаты Mu-Synthesis.
musyn ОтображениеМожно получить более подробное представление в прогресс итерации D-K путем установки 'Display' опция musynOptions к 'full'. Если вы включаете полное отображение, то musyn делает паузу после каждой итерации D-K так, чтобы можно было просмотреть подробные результаты итерации. В дополнение к информации, описанной в Значении по умолчанию musyn Отображение, полное отображение:
Показывает подробную информацию о расчете для синтеза контроллера (шаг K) текущей итерации. Для неструктурированных контроллеров смотрите hinfsyn для получения информации об этом отображении. Для контроллеров фиксированной структуры смотрите hinfstructOptions.
Показывает информацию о подгонках масштабирований D и масштабирований G (если таковые имеются) текущей итерации. Информация включает подходящий порядок масштабирований для каждого неопределенного блока. Это также включает счет качества подгонки. Счет, меньше чем или равный 1, указывает соответствующий подходящий для синтеза μ.
Генерирует графики, которые позволяют вам визуализировать D и подгонки G, устойчивая эффективность перед подбором кривой и масштабированным H ∞ эффективность после подбора кривой. Исследование этих графиков может помочь вам определить, достаточно ли максимальный подходящий порядок высок, чтобы получить все зависимое частотой изменение масштабирований (см. FitOrder опция musynOptions для получения дополнительной информации.
D Fit или D,G Fit постройте показывает масштабирующиеся данные и соответствующие рациональные подгонки.
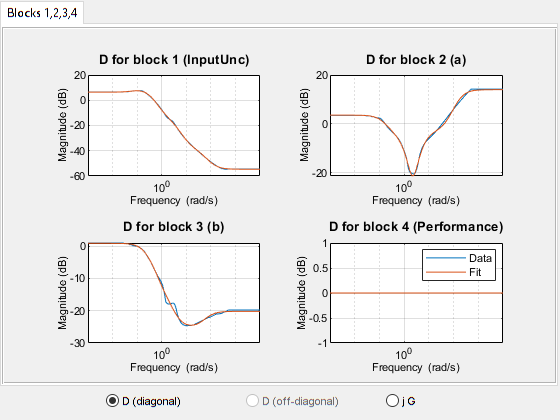
Используйте переключатели, чтобы выбрать который масштабирования смотреть:
D (diagonal) показывает величину диагональных элементов масштабирований D.
D (offdiagonal) показывает величину и фазу недиагональных элементов масштабирований D. Этот график доступен, когда ваша система повторила неопределенные блоки. (См. 'FullDG' опция musynOptions для получения дополнительной информации.
jG показывает величину и фазу G - масштабирования. масштабирования G присутствуют только, когда существует действительная неопределенность и MixedMU опция musynOptions 'on'. Смотрите улучшают результаты Mu-Synthesis.
Robust Performance постройте показывает эффективность системы с обратной связью до и после подбора кривой.
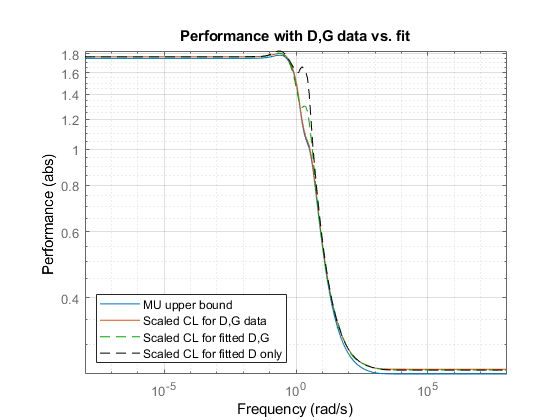
Трассировки на этом графике:
Mu upper bound — Устойчивая эффективность, верхняя граница как функция частоты
Scaled CL for D,G data — Масштабированный H ∞ эффективность прежде, чем соответствовать D и данным о масштабировании G с рациональными функциями
Scaled CL for fitted D,G — Масштабированный H ∞ эффективность после подбора кривой
Scaled CL for fitted D only — Показывает, какое поведение не было бы получено, если бы G был не использован
Для получения дальнейшей информации об алгоритме итерации D-K и значении всех количеств в полном отображении, см. Процесс Итерации D-K.
