

Создание КИХ-фильтра линейной фазы наименьших квадратов
Спроектируйте КИХ фильтр lowpass порядка 255 с областью перехода между и . Используйте fvtool отобразить величину и фазовые отклики фильтра.
b = firls(255,[0 0.25 0.3 1],[1 1 0 0]); fvtool(b,1,'OverlayedAnalysis','phase')
![]()
Идеальному дифференциатору дали частотную характеристику . Спроектируйте дифференциатор порядка 30, который ослабляет частоты выше . Включайте фактор в амплитуде, потому что частоты нормированы на . Отобразите нулевой фазовый отклик фильтра.
b = firls(30,[0 0.9],[0 0.9*pi],'differentiator'); fvtool(b,1,'MagnitudeDisplay','zero-phase')

Спроектируйте 24-й порядок антисимметричный фильтр с кусочными линейными полосами пропускания.
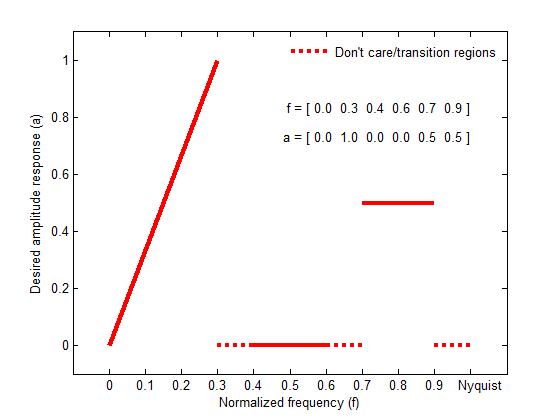
F = [0 0.3 0.4 0.6 0.7 0.9];
A = [0 1.0 0.0 0.0 0.5 0.5];
b = firls(24,F,A,'hilbert');Постройте желаемые и фактические частотные характеристики.
[H,f] = freqz(b,1,512,2); plot(f,abs(H)) hold on for i = 1:2:6, plot([F(i) F(i+1)],[A(i) A(i+1)],'r--') end legend('firls design','Ideal') grid on xlabel('Normalized Frequency (\times\pi rad/sample)') ylabel('Magnitude')

Спроектируйте КИХ фильтр lowpass. Полоса пропускания лежит в диапазоне от DC до рад/выборка. Полоса задерживания располагается от рад/выборка к частоте Найквиста. Произведите три различных проекта, изменив веса полос в методе наименьших квадратов.
В первом проекте сделайте вес полосы задерживания выше, чем вес полосы пропускания на коэффициент 100. Используйте эту спецификацию, когда очень важно, что ответ величины в полосе задерживания является плоским и близко к 0. Неравномерность в полосе пропускания приблизительно в 100 раз выше, чем пульсация полосы задерживания.
bhi = firls(18,[0 0.45 0.55 1],[1 1 0 0],[1 100]);
Во втором проекте инвертируйте веса так, чтобы вес полосы пропускания был 100 раз весом полосы задерживания. Используйте эту спецификацию, когда очень важно, что ответ величины в полосе пропускания является плоским и близко к 1. Пульсация полосы задерживания приблизительно в 100 раз выше, чем неравномерность в полосе пропускания.
blo = firls(18,[0 0.45 0.55 1],[1 1 0 0],[100 1]);
В третьем проекте дайте тот же вес обеим полосам. Результатом является фильтр с подобной пульсацией в полосе пропускания и полосе задерживания.
b = firls(18,[0 0.45 0.55 1],[1 1 0 0],[1 1]);
Визуализируйте ответы величины трех фильтров.
hfvt = fvtool(bhi,1,blo,1,b,1,'MagnitudeDisplay','Zero-phase'); legend(hfvt,'bhi: w = [1 100]','blo: w = [100 1]','b: w = [1 1]')

Если вы проектируете фильтр, таким образом, что продукт длины фильтра и ширины перехода является большим, вы можете получить это предупреждающее сообщение: Matrix is close to singular or badly scaled. Следующий пример иллюстрирует это ограничение.
b = firls(100,[0 0.15 0.85 1],[1 1 0 0]);
Warning: Matrix is close to singular or badly scaled. Results may be inaccurate. RCOND = 3.406552e-18.
fvtool(b,1,'OverlayedAnalysis','phase')
![]()
В этом случае, коэффициенты фильтра b не может представлять желаемый фильтр. Можно проверять фильтр путем рассмотрения его частотной характеристики.
firls проектирует КИХ-фильтр линейной фазы, который минимизирует взвешенную интегрированную квадратичную невязку между идеальной кусочной линейной функцией и ответом величины фильтра по набору желаемых диапазонов частот.
Ссылка [2] описывает теоретический подход позади firls. Функция решает систему линейных уравнений, включающих матрицу скалярного произведения примерно размера n\2 использование MATLAB®
\ оператор.
Это тип I (n является нечетным) и тип II (n является четным), фильтры линейной фазы. Векторы f и a задайте амплитудные частотой характеристики фильтра:
f вектор из пар точек частоты, заданных в области значений от 0 до 1, где 1 соответствует частоте Найквиста. Частоты должны быть в увеличивающемся порядке. Дублирующиеся точки частоты позволены и, на самом деле, могут использоваться, чтобы спроектировать фильтр, который является точно тем же самым как фильтрами, возвращенными fir1 и fir2 функции с прямоугольным (rectwin) окно.
a вектор, содержащий желаемые амплитуды в точках, заданных в f.
Желаемая амплитудная функция на частотах между парами точек (f (k), f (k +1)) для нечетного k является линейным сегментом, соединяющим точки (f (k), a (k)) и (f (k +1), a (k +1)).
Желаемая амплитудная функция на частотах между парами точек (f (k), f (k +1)) для k даже не задана. Это переход (“не заботятся”), области.
f и a та же длина. Эта длина должна быть четным числом.
Этот рисунок иллюстрирует отношение между f и a векторы в определении желаемого амплитудного ответа.
Эта функция проектирует тип I, II, III и фильтры линейной фазы IV. Тип I и II является фильтрами по умолчанию, когда n четен и нечетен, соответственно, в то время как 'hilbert' и 'differentiator' флаги производят тип III (n, является четным), и IV (n является нечетным), фильтры. Различные типы фильтра имеют различные симметрии и ограничения на их частотные характеристики (см. [1] для деталей).
| Линейный тип фильтра фазы | Порядок фильтра | Симметрия коэффициентов | Ответ H (f), f = 0 | Ответ H (f), f = 1 (Найквист) |
|---|---|---|---|---|
Тип I | Даже | Никакое ограничение | Никакое ограничение | |
Тип II | Нечетный | Никакое ограничение | H (1) = 0 | |
Тип III | Даже | H (0) = 0 | H (1) = 0 | |
Введите IV | Нечетный | H (0) = 0 | Никакое ограничение |
[1] Оппенхейм, Алан V, Рональд В. Шафер и Джон Р. Бак. Обработка сигналов дискретного времени. Верхний Сэддл-Ривер, NJ: Prentice Hall, 1999.
[2] Парки, Томас В. и К. Сидни Беррус. Создание цифровых фильтров. Хобокен, NJ: John Wiley & Sons, 1987, стр 54–83.
fir1 | fir2 | firpm | rcosdesign