Обновите логарифмические функции построения графика рейса UAV
updatePlot( добавляет или обновляет график с именем mapper,plotName,plotFunc,requiredSignals)plotName сохраненный в mapper. Задайте функцию построения графика как предопределенное имя графика или указатель на функцию и необходимые сигналы для графика. Для списка предварительно сконфигурированных сигналов и графиков, смотрите Предопределенные Сигналы и Предопределенные Графики.
После отображения сигналов к списку предопределенного использования сигналов mapSignal, определенные графики сделаны доступными при вызове show. Чтобы просмотреть список доступных графиков и их связанных сигналов для вашего конкретного объекта, вызовите info(mapper,"Plot"). Если вы хотите задать пользовательские графики на основе сигналов, использовать updatePlot.
Каждый предопределенный график имеет набор необходимых сигналов, которые должны быть сопоставлены.
Предопределенные графики
| График | Описание | Сигналы |
|---|---|---|
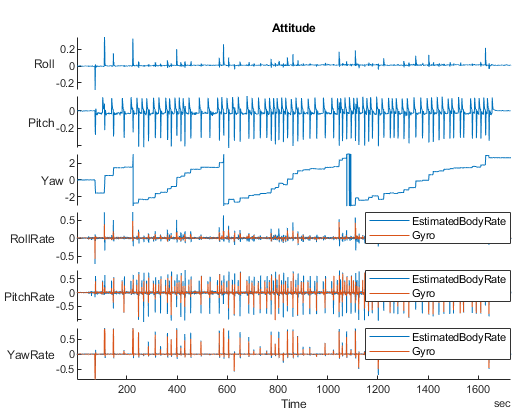
| Совмещенный график списка, подачи, углов отклонения от курса и уровней вращения тела | AttitudeEuler, AttitudeRate, Gyro# |
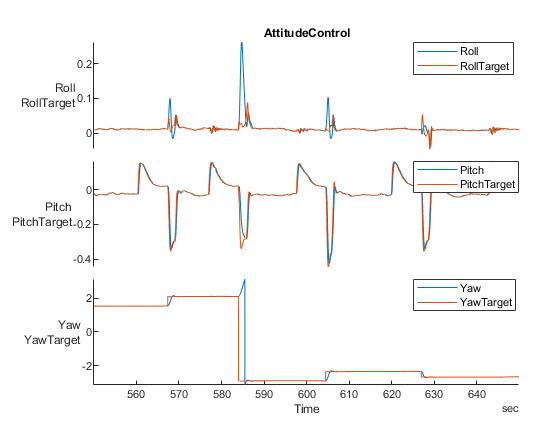
| Предполагаемое отношение UAV и отношение предназначаются для сетбола | AttitudeEuler, AttitudeTargetEuler |
| График потребления батареи | Battery |
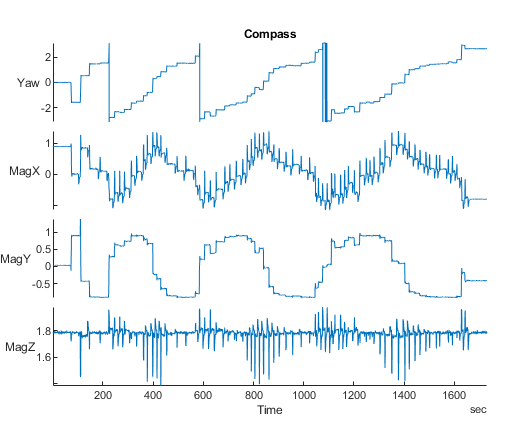
| Предполагаемое отклонение от курса и показания магнитометра | AttitudeEuler, Mag#, GPS# |
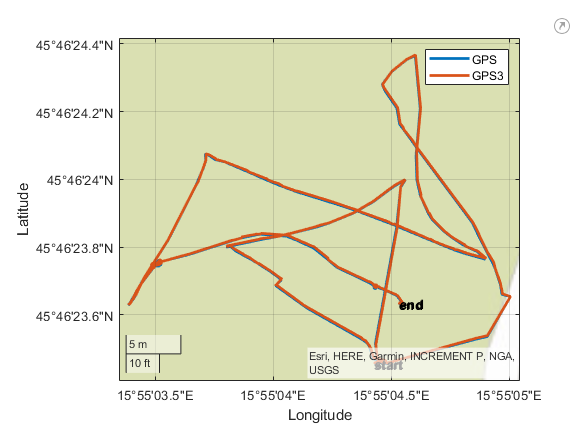
| Сырые данные график Лэт-Лона для показаний датчика GPS. | GPS# |
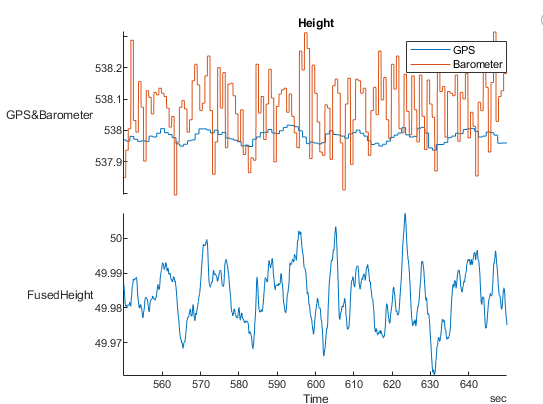
| Совмещенные графики чтения барометра, высотного чтения GPS и сплавленной оценки высоты | Barometer#, GPS#, LocalNED |
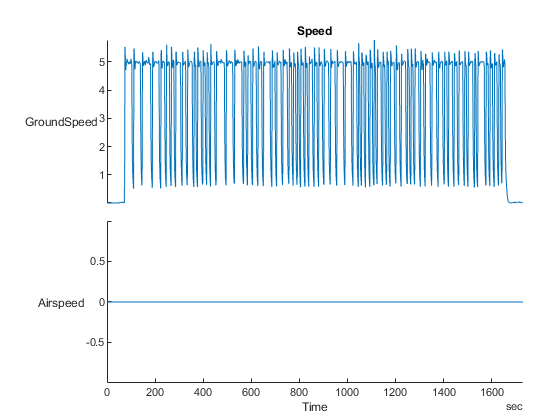
| Совмещенный график наземной скорости и воздушной скорости | GPS#, Airspeed# |
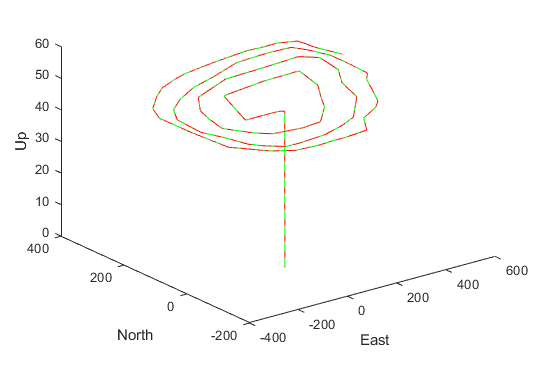
| Траектория в локальных координатах по сравнению с целевыми сетболами | LocalNED, LocalNEDTarget |
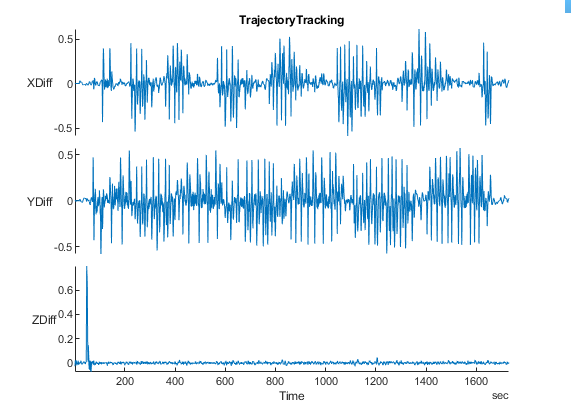
| Ошибка между желаемым и фактическим положением в координатах NED | LocalNED, LocalNEDTarget |
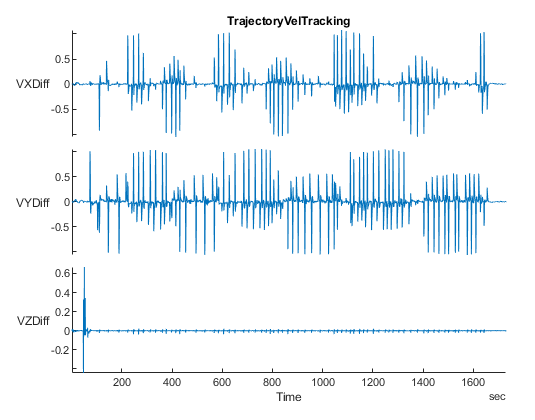
| Ошибка между желаемой и фактической скоростью в координатах NED | LocalNEDVel, LocalNEDVelTarget |
extract | flightLogSignalMapping | info | mapSignal | mavlinktlog | show