(Не рекомендуемый) карта Несоизмеримости между стереоизображениями
disparity не рекомендуется. Использование disparityBM или disparitySGM вместо этого. Для получения дополнительной информации см. Вопросы совместимости
disparityMap = disparity(I1,I2)disparityMap, для пары стереоизображений, I1 и I2.
disparityMap = disparity(I1,I2,Name,Value)Name,Value парные аргументы.
Загрузите изображения и преобразуйте их в шкалу полутонов.
I1 = imread('scene_left.png'); I2 = imread('scene_right.png');
Покажите анаглиф стерео. Используйте красно-голубые стекла стерео, чтобы просмотреть изображение в 3-D.
figure
imshow(stereoAnaglyph(I1,I2));
title('Red-cyan composite view of the stereo images');
Вычислите карту несоизмеримости.
disparityRange = [-6 10]; disparityMap = disparity(rgb2gray(I1),rgb2gray(I2),'BlockSize',... 15,'DisparityRange',disparityRange);
Отобразите карту несоизмеримости. Для лучшей визуализации используйте область значений несоизмеримости в качестве области значений отображения для imshow.
figure
imshow(disparityMap,disparityRange);
title('Disparity Map');
colormap(gca,jet)
colorbar
I1 — Введите изображение 1Введите изображение, на которое ссылаются как I1 соответствие камере 1, заданный в 2D шкале полутонов. Стереоизображения, I1 и I2, должен быть исправлен таким образом, что соответствующие точки расположены на тех же строках. Можно выполнить это исправление с rectifyStereoImages функция.
Можно улучшить скорость функции путем установки класса I1 и I2 к uint8, и количество столбцов, чтобы быть делимым 4. Введите отображает I1 и I2 должно быть действительным, конечным, и неразреженным. Они должны быть тем же классом.
Типы данных: uint8 | uint16 | int16 | single | double
I2 — Введите изображение 2Введите изображение, на которое ссылаются как I2 соответствие камере 2, заданный в 2D шкале полутонов. Входные изображения должны быть исправлены таким образом, что соответствующие точки расположены на тех же строках. Можно улучшить скорость функции путем установки класса I1 и I2 к uint8, и количество столбцов, чтобы быть делимым 4. Введите отображает I1 и I2 должно быть действительным, конечным, и неразреженным. Они должны быть тем же классом.
Типы данных: uint8 | uint16 | int16 | single | double
Задайте дополнительные разделенные запятой пары Name,Value аргументы. Name имя аргумента и Value соответствующее значение. Name должен появиться в кавычках. Вы можете задать несколько аргументов в виде пар имен и значений в любом порядке, например: Name1, Value1, ..., NameN, ValueN.
'Method', 'BlockMatching', задает 'Method' свойство быть установленным в 'BlockMatching'.'Method' — Алгоритм оценки несоизмеримости'SemiGlobal' (значение по умолчанию) | 'BlockMatching'Алгоритм оценки несоизмеримости в виде разделенной запятой пары, состоящей из 'Method'и любой 'BlockMatching' или 'SemiGlobal'. Функция несоизмеримости реализует базисный блок, Соответствующий [1] и Полуглобальный Блок, Соответствующий [3] алгоритмы. В 'BlockMatching' метод, функция вычисляет несоизмеримость путем сравнения суммы абсолютных разностей (SAD) каждого блока пикселей в изображении. В 'SemiGlobal' метод сопоставления, функция дополнительно обеспечивает подобную несоизмеримость на соседних блоках. Это дополнительное ограничение приводит к более полной оценке несоизмеримости, чем в 'BlockMatching' метод.
Алгоритмы выполняют эти шаги:
Вычислите меру контраста изображения при помощи фильтра Sobel.
Вычислите несоизмеримость для каждого пикселя в I1.
Отметьте элементы карты несоизмеримости, disparityMap, это не было вычислено надежно. Функциональное использование –realmaxединственный) отметить эти элементы.
'DisparityRange' — Область значений несоизмеримостиОбласть значений несоизмеримости в виде разделенной запятой пары, состоящей из 'DisparityRange'и двухэлементный вектор. Двухэлементный вектор должен быть в формате [MinDisparity, MaxDisparity]. Оба элемента должны быть целым числом и могут быть отрицательными. MinDisparity и MaxDisparity должны быть в области значений [-image width, image width]. Различие между MaxDisparity и MinDisparity должно быть делимым 16. DisparityRange должно быть действительным, конечным, и неразреженным. Если камера раньше брала I1 был справа от камеры, используемой, чтобы взять I2, затем MinDisparity должен быть отрицательным.
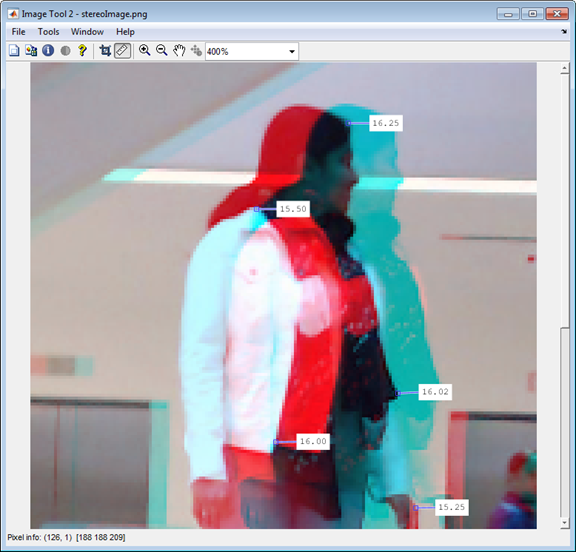
Область значений несоизмеримости зависит от расстояния между этими двумя камерами и расстояния между камерами и предметом интереса. Увеличьте DisparityRange когда камеры далеко друг от друга, или объекты близко к камерам. Чтобы определить разумную несоизмеримость для вашей настройки, отобразите анаглиф стерео входных изображений в imtool и используйте инструмент Distance, чтобы измерить расстояния между парами соответствующих точек. Измените MaxDisparity, чтобы соответствовать измерению.
'BlockSize' — Размер квадратного блокаРазмер квадратного блока в виде разделенной запятой пары, состоящей из 'BlockSize'и нечетное целое число в области значений [5,255]. Это наборы значений ширина для размера квадратного блока. Функция использует квадратный блок пикселей для сравнений между I1 и I2. BlockSize должно быть действительным, конечным, и неразреженным.
'ContrastThreshold' — Контрастная пороговая область значенийКонтрастная пороговая область значений в виде разделенной запятой пары, состоящей из 'ContrastThreshold'и скалярное значение в области значений (0,1]. Контрастный порог задает допустимый диапазон контрастных значений. Увеличение этого параметра приводит к меньшему количеству пикселей, отмечаемых как ненадежное. ContrastThreshold должно быть действительным, конечным, и неразреженным.
'UniquenessThreshold' — Минимальное значение уникальностиМинимальное значение уникальности в виде разделенной запятой пары, состоящей из 'UniquenessThreshold'и неотрицательное целое число. Увеличение этого параметра приводит к функции, отмечающей больше ненадежных пикселей. Когда значение уникальности для пикселя является низким, несоизмеримость, вычисленная для него, менее надежна. Устанавливание порога к 0 отключает пороговую обработку уникальности. UniquenessThreshold должно быть действительным, конечным, и неразреженным.
Функция задает уникальность как отношение оптимальной оценки несоизмеримости и менее оптимальной оценки несоизмеримости. Например:
| Позвольте K быть лучшей предполагаемой несоизмеримостью и позволить V быть соответствующим SAD (Сумма Абсолютной разности) значение. |
| Рассмотрите V как наименьшее значение SAD в целой области значений несоизмеримости и v как наименьшее значение SAD в целой области значений несоизмеримости, исключая K, K-1 и K +1. |
Если v <V * (1+0.01UniquenessThreshold), затем функция отмечает несоизмеримость для пикселя как ненадежную. |
'DistanceThreshold' — Максимальное расстояние для слева направо отображает проверку[] (отключенное) (значение по умолчанию) | неотрицательное целое числоМаксимальное расстояние для слева направо отображает проверку между двумя точками в виде разделенной запятой пары, состоящей из 'DistanceThreshold'и неотрицательное целое число. Увеличение этого параметра приводит к меньшему количеству пикселей, отмечаемых как ненадежное. С другой стороны, когда вы уменьшаете значение порога расстояния, вы увеличиваете надежность карты несоизмеримости. Можно установить этот параметр на пустой матричный [] отключить его. DistanceThreshold должно быть действительным, конечным, и неразреженным.
Порог расстояния задает максимальное расстояние между точкой в I1 и та же точка найдена от I2. Функция находит расстояние и отмечает пиксель следующим образом:
| Позвольте p 1 быть точкой в изображении I 1. |
| Шаг 1: функциональные поиски указывают, что p 1 лучше всего совпадает в изображении с I 2 (слева направо проверка), и находит точку p 2. |
| Шаг 2: функциональные поиски p 2 лучше всего совпадают в изображении с I 1 (справа налево проверка), и находит точку p 3. |
Если поиск возвращает расстояние между p 1 и p 3 больших, чем DistanceThreshold, функция отмечает несоизмеримость для точки p 1 как ненадежную. |
'TextureThreshold' — Минимальный порог структурыМинимальный порог структуры в виде разделенной запятой пары, состоящей из 'TextureThreshold'и скалярное значение в области значений [0, 1). Порог структуры задает минимальное значение структуры для пикселя, чтобы быть надежным. Чем ниже структура для блока пикселей, тем менее надежна вычисленная несоизмеримость для пикселей. Увеличение этого параметра приводит к большему количеству пикселей, отмечаемых как ненадежное. Можно установить этот параметр на 0 отключить его. Этот параметр применяется только, когда вы устанавливаете Method к 'BlockMatching'.
Структура пикселя задана как сумма влажного контраста, вычисленного по BlockSize- BlockSize окно вокруг пикселя. Функция считает несоизмеримость вычисленной для пикселя ненадежный и отмечает его, когда структура падает ниже значения, заданного:
Texture <X* TextureThreshold * BlockSize2
I1 и I2.
TextureThreshold должно быть действительным, конечным, и неразреженным.
Если ваша получившаяся карта несоизмеримости выглядит шумной, попытайтесь изменить DisparityRange. Область значений несоизмеримости зависит от расстояния между этими двумя камерами и расстояния между камерами и предметом интереса. Увеличьте DisparityRange когда камеры далеко друг от друга, или объекты близко к камерам. Чтобы определить разумную несоизмеримость для вашей настройки, отобразите анаглиф стерео входных изображений в imtool и используйте инструмент Distance, чтобы измерить расстояния между парами соответствующих точек. Измените MaxDisparity, чтобы соответствовать измерению.
[1] Konolige, K., Маленькие Системы Видения: Оборудование и Реализация, Продолжения 8-го Международного Симпозиума в Автоматизированном Исследовании, страницах 203-212, 1997.
[2] Брадский, G. и А. Кэехлер, изучение OpenCV: компьютерное зрение с библиотекой OpenCV, О'Райли, Севастополем, CA, 2008.
[3] Hirschmuller, H., точная и эффективная обработка стерео полуглобальной переменной, соответствующей и взаимной информацией, международной конференцией по вопросам компьютерного зрения и распознавания образов, 2005.
estimateCameraParameters | estimateUncalibratedRectification | reconstructScene | rectifyStereoImages | Stereo Camera Calibrator
