Объект для данных об управлении для структуры от движения и визуальной одометрии
vSet = viewSet
Примечание
Объект viewSet будет удален в будущем релизе. Используйте imageviewset объект вместо этого.
vSet = viewSetviewSet возразите что представления хранилищ и связи между представлениями. Представление включает характерные точки и абсолютное положение камеры. Связь между двумя представлениями включает соответствия точки и относительное положение камеры между ними. Если вы заполняете viewSet объект, можно использовать его, чтобы найти дорожки точки через несколько представлений и получить положения камеры, которые будут использоваться triangulateMultiview и bundleAdjustment функции.
Поддержка генерации кода:
Генерация кода поддержек: нет
Блок MATLAB function поддержек: Нет
Поддержка генерации кода, указания по применению и ограничения
Эти свойства только для чтения.
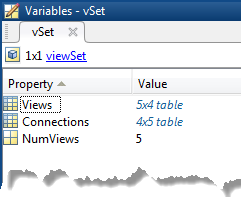
NumViews — Количество представленийКоличество представлений, сохраненных как целое число.
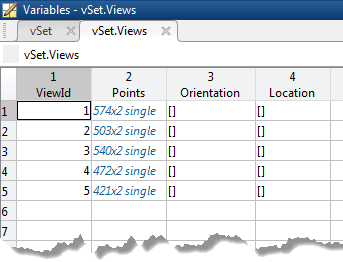
Views — Просмотрите атрибутыПросмотрите атрибуты, сохраненные как таблица с четырьмя столбцами. Таблица содержит столбцы для ViewID'points', Orientation, и Location. Используйте poses метод, чтобы получить идентификаторы, ориентацию и местоположение для точек.
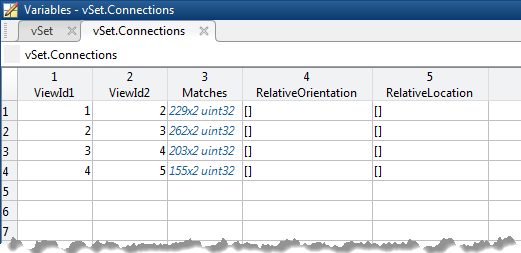
Connections — Попарные связи между представлениямиПопарные связи между представлениями, сохраненными как таблица с пятью столбцами. Столбцами является ViewID1, ViewID2, Matches, RelativeOrientation, и RelativeLocation. Количество записей в таблице представляет количество связей. Каждый индекс в Matches столбец представляет связь между двумя представлениями, обозначенными представлением IDs.
vSet — Просмотрите объект набораviewSet объектviewSet объект раньше хранил представления и связи между представлениями.
| addConnection | Добавьте связь между двумя представлениями |
| addView | Добавьте новое представление, чтобы просмотреть объект набора |
| deleteConnection | Удалите связь между двумя представлениями от объекта набора представления |
| deleteView | Удалите существующее представление из объекта набора представления |
| findTracks | Найдите соответствующие точки через несколько представлений |
| hasConnection | Проверяйте, существует ли связь между двумя представлениями |
| hasView | Проверяйте, существует ли представление |
| положения | Возвращает положения камеры, сопоставленные в представления |
| updateConnection | Измените связь между двумя представлениями в объекте набора представления |
| updateView | Измените существующее представление в объекте набора представления |
bundleAdjustment | detectBriskFeatures | detectFastFeatures | detectHarrisFeatures | detectMinEigenFeatures | detectMSERFeatures | detectSURFFeatures | matchFeatures | pointTrack | table | triangulateMultiview
