

Найдите ребра объектов в полутоновом пиксельном потоке
Vision HDL Toolbox / Analysis & Enhancement
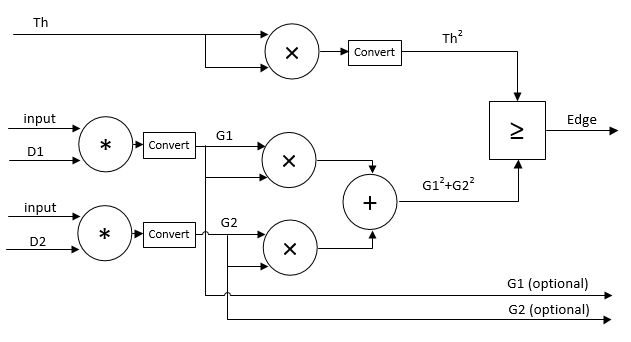
Блок Edge Detector находит ребра в полутоновом пиксельном потоке при помощи Sobel, Прюитта или метода Робертса. Блок применяет операцию свертки к входным пикселям с производными матрицами приближения, чтобы найти градиент пиксельной величины вдоль двух ортогональных направлений. Это затем сравнивает сумму квадратов градиентов к квадрату настраиваемого порога, чтобы определить, представляют ли градиенты ребро.
По умолчанию блок возвращает бинарное изображение как поток пиксельных значений. Пиксельное значение 1 указывает, что пиксель является ребром. Можно отключить ребро выход. Можно также включить выход значений градиента в двух ортогональных направлениях на уровне каждого пикселя.
Этот блок использует пиксельный интерфейс потоковой передачи с шиной для сигналов управления кадром. Этот интерфейс позволяет блоку действовать независимо от размера изображения и формата. pixel, Edge и порты градиента на этом блоке поддерживают одну пиксельную потоковую передачу или мультипиксельную потоковую передачу. Одна пиксельная потоковая передача принимает и возвращает одно пиксельное значение каждый такт. Мультипиксельная потоковая передача принимает и возвращает вектор 4 или 8 пикселей за такт, чтобы поддержать высокую частоту кадров или форматы с высоким разрешением. Наряду с пикселем, блок принимает и возвращает pixelcontrol соедините шиной содержащий пять управляющих сигналов. Управляющие сигналы указывают на валидность каждого пикселя и их местоположения в системе координат. Для мультипиксельной потоковой передачи один набор управляющих сигналов применяется ко всем четырем или восьми пикселям в векторе. Чтобы преобразовать систему координат (пиксельная матрица) в последовательный пиксельный поток и управляющие сигналы, используйте блок Frame To Pixels. Для полного описания интерфейса смотрите Пиксельный Интерфейс Потоковой передачи.
Блок Edge Detector предоставляет три метода для обнаружения ребер во входном изображении. Методы используют различные производные матрицы приближения, чтобы найти два ортогональных градиента. Методы Sobel и Prewitt вычисляют градиент в горизонтальных и вертикальных направлениях. Метод Робертса вычисляет градиенты в 45 градусах и 135 градусах. Блок использует те же матрицы в качестве блока Edge Detection в Computer Vision Toolbox™.
Когда вы используете мультипиксельную потоковую передачу, блок использует однострочную память и реализует фильтры NumberOfPixels параллельно. Это увеличение аппаратных ресурсов является компромиссом для увеличения пропускной способности по сравнению с потоковой передачей одно пикселя.
| Метод | Направление 1 | Направление 2 |
|---|---|---|
| Sobel | ||
| Prewitt | ||
| Робертс |
Примечание
Коэффициенты Prewitt требуют дополнительных битов точности, потому что они не степени двойки. Блок использует 16 битов, чтобы представлять коэффициенты Prewitt. Для 8-битного входа размер по умолчанию градиентов полной точности составляет 27 битов. При использовании метода Prewitt хорошая практика должна уменьшать размер слова, используемый для вычисления градиента. Установите флажок Output the gradient components, и затем на вкладке Data Types, задайте меньший размер слова с помощью Gradient Data Type.
Блок применяет операцию свертки к окружению входного пикселя с производными матрицами, D1 и D2. Это затем сравнивает сумму квадратов градиентов к квадрату порога. Вычисление квадрата порога старается не создавать схему квадратного корня. Блок бросает градиенты к типу, который вы задали на вкладке Data Types. Преобразование типов на квадрате порога совпадает с типом суммы квадратов градиентов.
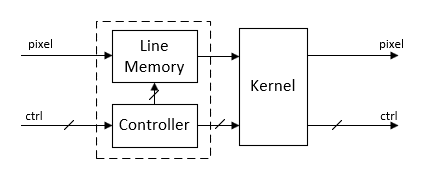
Задержка блока является буферной задержкой линии плюс задержка вычисления ядра. Буферная задержка линии включает ребро, дополняющее по умолчанию. Задержка дополнительной операции зависит от размера ядра. Если дополнение ребра не необходимо для вашего проекта, можно уменьшать задержку путем установки параметра Padding method на None. Когда вы используете эту опцию, задержка блока не зависит от вашего размера ядра. Чтобы определить точную задержку для любой настройки блока, измерьте количество временных шагов между управляющими сигналами ввода и вывода.
Примечание
Когда вы будете использовать дополнение ребра, используйте горизонтальный интервал гашения, больше, чем дважды ширина ядра. Этот интервал позволяет блоку закончить обрабатывать одну линию, прежде чем это начнет обрабатывать следующее, включая добавление дополнительных пикселей до и после активных пикселей в линии. Стандартные форматы потокового видео используют горизонтальный интервал гашения приблизительно 25% ширины системы координат. Этот интервал намного больше, чем фильтры применились к каждой системе координат. Когда вы отключаете дополнение ребра, горизонтальный интервал гашения должен быть по крайней мере 12 циклами и независим от размера ядра. Если вы используете пользовательский формат видео, установите горизонтальный интервал гашения при помощи параметров блоков Frame To Pixels. Горизонтальный интервал гашения равен Total pixels per line – Active pixels per line или, эквивалентно, Front porch + Back porch. Для получения дополнительной информации смотрите, Конфигурируют Интервалы гашения.
