

Морфологическое расширение полутоновых пиксельных данных
Vision HDL Toolbox / Морфологические Операции
Блок Grayscale Dilation выполняет морфологическое расширение на потоке значений интенсивности пикселей. Можно задать окружение или элемент структурирования до 32 32 пикселей. Для линии, квадрата или прямоугольных элементов структурирования больше чем 8 пикселей шириной, блок использует алгоритм Ван Херка, чтобы найти максимальное пиксельное значение. Этот алгоритм использует только три компаратора, чтобы найти максимумы всех строк, и затем использует дерево сравнения, чтобы найти максимальное пиксельное значение результатов строки.
Для структурирования элементов меньше чем 8 пикселей шириной, или которые содержат нулевые элементы, блок реализует конвейерное дерево сравнения для каждой строки окружения. Дополнительное дерево сравнения находит максимальное пиксельное значение результатов строки. Если элемент структурирования содержит нули, которые исключают пиксели, алгоритм сохраняет аппаратные ресурсы, не реализовывая компараторы для тех пиксельных местоположений.
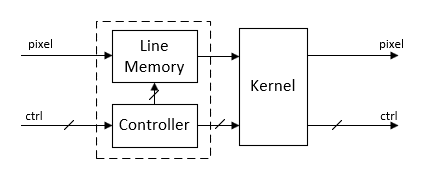
Этот блок использует пиксельный интерфейс потоковой передачи с pixelcontrol соедините шиной для сигналов управления кадром. Этот интерфейс позволяет блоку действовать независимо от размера изображения и формата. Все блоки Vision HDL Toolbox™ используют тот же интерфейс потоковой передачи. Блок принимает и возвращает скалярное пиксельное значение и шину, которая содержит пять управляющих сигналов. Управляющие сигналы указывают на валидность каждого пикселя и его местоположения в системе координат. Чтобы преобразовать систему координат (пиксельная матрица) в последовательный пиксельный поток и управляющие сигналы, используйте блок Frame To Pixels. Для полного описания интерфейса смотрите Пиксельный Интерфейс Потоковой передачи.
Блок заполняет изображение нулями для операции расширения. Для получения дополнительной информации смотрите, что Ребро Дополняет.
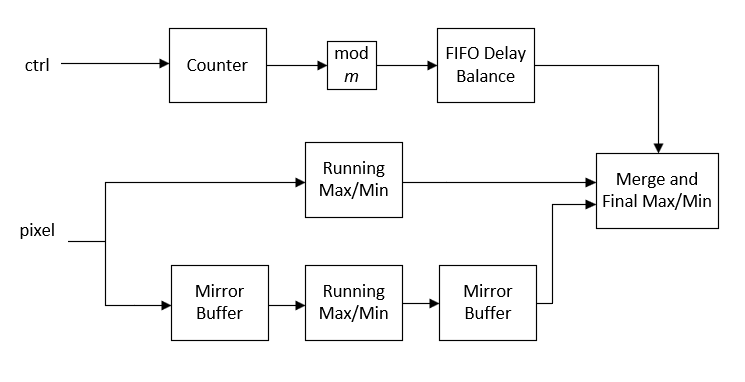
Для линии, квадрата или прямоугольных элементов структурирования больше чем 8 пикселей шириной, блок реализует алгоритм Ван Херка. Все пиксели в элементе структурирования должны быть установлены в один. Блок разлагает элемент структурирования на строки и последовательно находит максимальное пиксельное значение в каждой строке при помощи алгоритма Ван Херка. Если размер входного кадра не является кратным пикселей m, память линии также добавляет горизонтальное дополнение в кратное m. Эта реализация использует только три общих количества компараторов для всех строк. Затем если существует больше чем одна строка, она вычисляет максимальное пиксельное значение результатов строки при помощи дерева сравнения. Схема указывает на задержку каждого блока расчета.
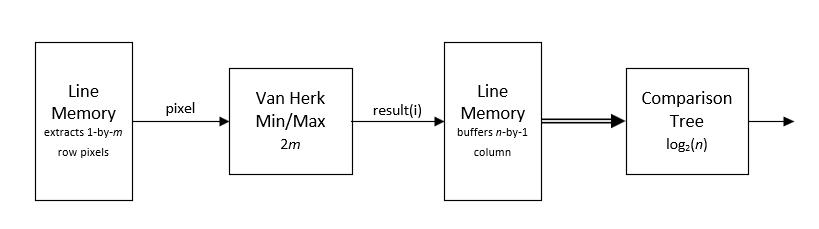
Ядро Ван Херка вычисляет рабочий прямой максимум и рабочий обратный максимум пиксельных значений в каждой строке окружения. Для этого расчета должны быть буферизованы пиксели в строке, и порядок инвертируется. Буфер добавляет задержку относительно реализации дерева сравнения. Зеркальный Буфер является пинг-понгом RAM пикселей m, где одна память читает значения в обратном порядке, в то время как другая память пишет. Ядро использует 3+n-1 компараторы.
Для структурирования элементов, меньших, чем 8 пикселей шириной или с одним или несколькими обнуленными пикселями, блок реализует дерево сравнения.
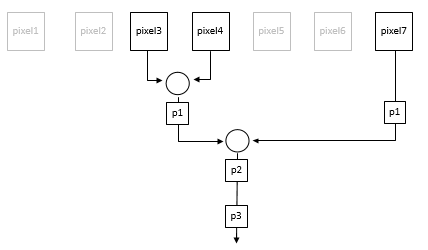
Схема показывает архитектуру операции расширения. Алгоритм находит максимальное пиксельное значение каждой строки окружения параллельно. Затем это вычисляет максимальное пиксельное значение строк с помощью другого дерева сравнения. Схема указывает на задержку каждого блока расчета.
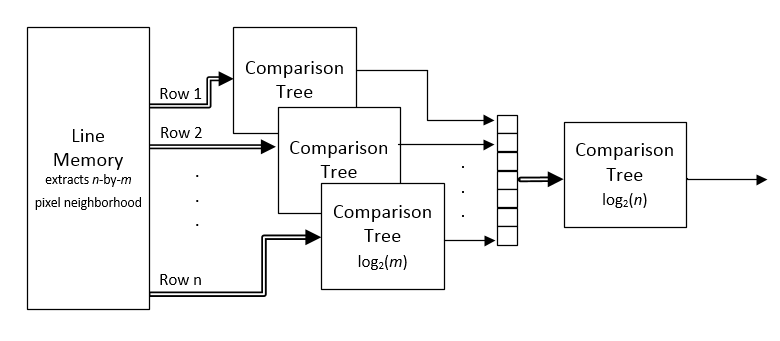
Для прямоугольного окружения, которое является широкими пикселями m, деревья сравнения первой стадии содержат m – 1 компаратор по log2 (m) такты. Например, для прямоугольного окружения, которое 7 пикселей шириной, дерево сравнения имеет шесть компараторов более чем 3 такта.
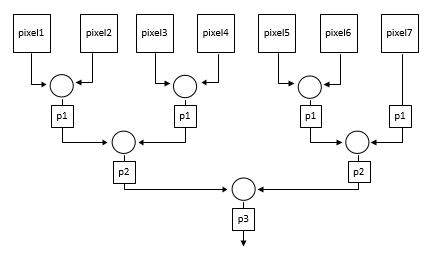
Если окружение, которое вы задаете, содержит, обнуляет, сгенерированный HDL исключает компаратор для нулевых местоположений. Конвейерная задержка через дерево сравнения не изменяется. Например, для непрямоугольного окружения со строкой [0 0 1 1 0 0 1], дерево сравнения для той строки содержит два компаратора и все еще использует 3 такта.
Задержка операции является буферной задержкой линии плюс задержка вычисления ядра. Буферная задержка линии включает дополнение ребра.
Задержка ядра Ван Херка для окружения m-by-n пиксели 2m + log2 (n). Блок реализует это ядро для линии, квадрата или прямоугольных элементов структурирования больше чем 8 пикселей шириной, без обнуленных пикселей.
Задержка ядра дерева сравнения для окружения m-by-n пиксели является log2 (m) +log2 (n). Блок реализует это ядро для структурирования элементов, меньших, чем 8 пикселей шириной или с одним или несколькими обнуленными пикселями.
Примечание
Когда вы будете использовать дополнение ребра, используйте горизонтальный интервал гашения, больше, чем дважды ширина ядра. Этот интервал позволяет блоку закончить обрабатывать одну линию, прежде чем это начнет обрабатывать следующее, включая добавление дополнительных пикселей до и после активных пикселей в линии. Стандартные форматы потокового видео используют горизонтальный интервал гашения приблизительно 25% ширины системы координат. Этот интервал намного больше, чем фильтры применились к каждой системе координат. Когда вы отключаете дополнение ребра, горизонтальный интервал гашения должен быть по крайней мере 12 циклами и независим от размера ядра. Если вы используете пользовательский формат видео, установите горизонтальный интервал гашения при помощи параметров блоков Frame To Pixels. Горизонтальный интервал гашения равен Total pixels per line – Active pixels per line или, эквивалентно, Front porch + Back porch. Для получения дополнительной информации смотрите, Конфигурируют Интервалы гашения.
Frame To Pixels | Grayscale Erosion | visionhdl.GrayscaleDilation | Dilation (Computer Vision Toolbox)