Декодируйте код LDPC с помощью разделенного на уровни распространения веры с суммой min или нормированным алгоритмом аппроксимации суммы min
Wireless HDL Toolbox / Выявление ошибок и Коррекция
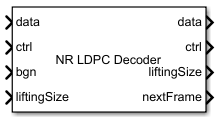
Блок NR LPDC Decoder реализует декодер имеющей малую плотность проверки четности (LDPC) с благоприятными для оборудования управляющими сигналами. Блок принимает проколотые значения отношения логарифмической правдоподобности (LLR), поток управляющих сигналов, основного номера графика и подъема размеров. Блок выходные параметры декодировал биты, поток управляющих сигналов, снимая размеры и сигнал, который указывает, когда блок готов принять новые входные параметры.
Этот блок предоставляет возможность реализовывать разделенное на уровни распространение веры или с нормированным алгоритмом аппроксимации суммы min или с алгоритмом аппроксимации суммы min. Эта реализация соответствия та из функции nrLDPCDecode (5G Toolbox). Можно использовать этот блок для кодирования канала нисходящего канала, и восходящий канал совместно использовал каналы и канал разбивки на страницы согласно TS 38.212 [1] стандарта нового радио (NR) 5G.
Блок поддерживает скалярные и векторные входные параметры. Блок обеспечивает архитектуру, подходящую для аппаратного развертывания и генерации HDL-кода. Для получения дополнительной информации см. Алгоритмы.
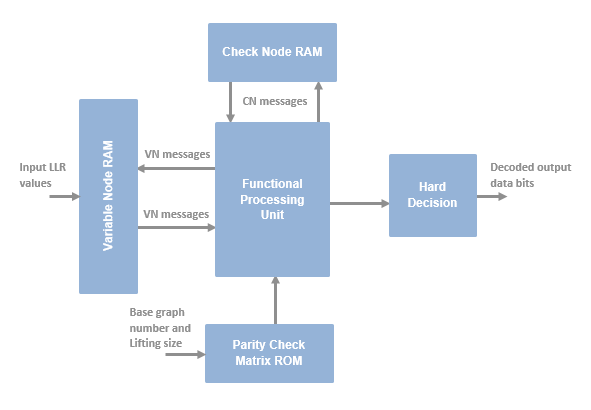
Этот рисунок показывает блок-схему архитектуры блока NR LDPC Decoder. Блок Functional Processing Unit вычисляет сообщения узла переменной (VN) и сообщения узла проверки (CN) на основе многоуровневого распространения веры или с нормированным алгоритмом аппроксимации суммы min или с алгоритмом аппроксимации суммы min. Для получения дополнительной информации см. Алгоритм (5G Toolbox).
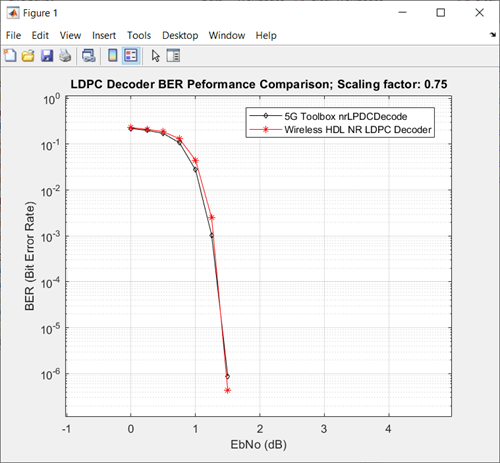
Реализация блока совпадает с эффективностью функции nrLDPCDecode (5G Toolbox). Этот график показывает эффективность блока для 4-битного входа LLR, когда параметр Algorithm устанавливается на Min-sum.
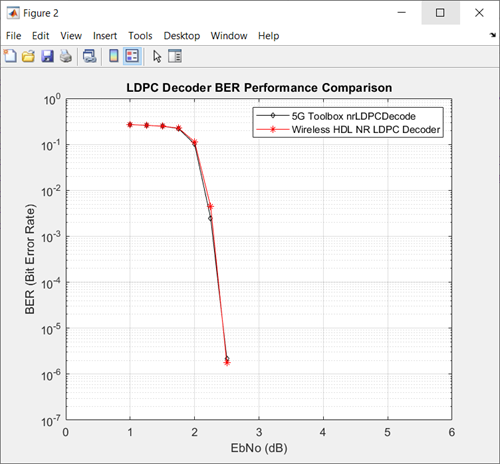
Этот график показывает эффективность блока для 4-битного входа LLR, когда параметр Algorithm устанавливается на Normalized min-sum.
Задержка блока варьируется на основе значений bgn и входных портов liftingSize и конкретного количества итераций. Поскольку задержка варьируется, используйте управляющий сигнал nextFrame определить, когда блок готов к новому входному кадру.
Задержка блока равна r x (t + (m x 8) x ceil(liftingSize/64) + t + m x (7 – ceil(liftingSize/64))) + (n x liftingSize) + 18. В этом вычислении r является количеством итераций, n является количеством столбцов в матрице проверки четности, t является дважды общим количеством не — 1 элемент в матрице проверки четности, и m является количеством строк в матрице проверки четности.
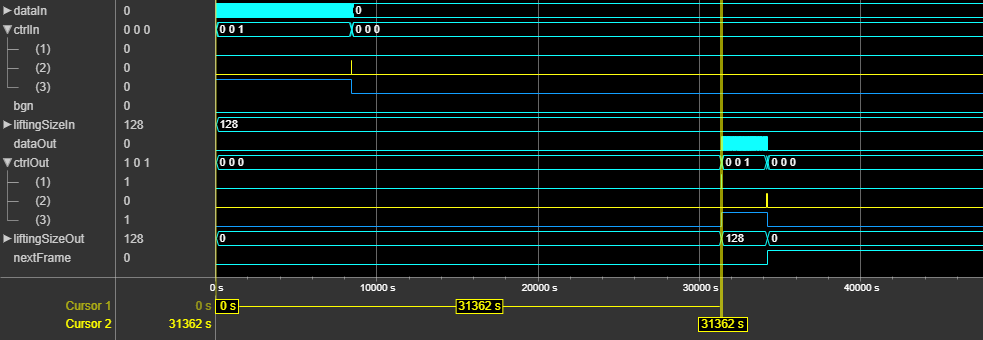
Этот рисунок показывает демонстрационный выход блока NR LDPC Decoder с задержкой. В этом случае, bgn, значения входного порта liftingSize установлены к 0 и 128, соответственно и параметр Number of iterations устанавливается на 8. Задержка блока является 31 362 тактами.
Для векторных входных параметров задержка блока равна r x (t + (m x 9) + n x (ceil(liftingSize/64))) + 18. В этом вычислении r является количеством итераций, n является количеством столбцов в матрице проверки четности, t является дважды общим количеством не — 1 элемент в матрице проверки четности, и m является количеством строк в матрице проверки четности.
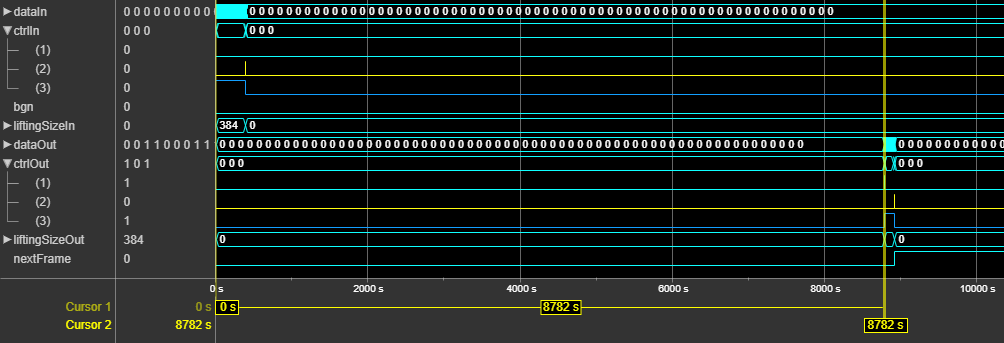
Этот рисунок показывает демонстрационный выход блока NR LDPC Decoder с задержкой. В этом случае, bgn, значения входного порта liftingSize установлены к 0 и 384, соответственно и параметр Number of iterations устанавливается на 8. Задержка блока является 8 782 тактами.
[1] 3GPP TS 38.212. “NR; мультиплексирование и кодирование канала”. Проект партнерства третьего поколения; сеть радиодоступа Technical Specification Group.
[2] Gallager, R. “Имеющие малую плотность Коды с проверкой четности”. Транзакции IEEE на Теории информации 8, № 1 (январь 1962): 21–28. www.doi.org/10.1109/TIT.1962.1057683.

