Пакет: TuningGoal
Минимальное ограничение усиления цикла для настройки системы управления
Используйте TuningGoal.MinLoopGain объект осуществить минимальное усиление цикла в конкретном диапазоне частот. Используйте эту настраивающую цель с настраивающими командами системы управления, такими как systune или looptune.
Эта настраивающая цель налагает минимальное усиление на частотную характеристику разомкнутого контура (L) в заданном местоположении в вашей системе управления. Вы задаете минимальный коэффициент усиления разомкнутого контура в зависимости от частоты (минимальный gain profile). Для обратной связи MIMO заданный профиль усиления интерпретирован как нижняя граница на самом маленьком сингулярном значении L.
Когда вы настраиваете систему управления, минимальный профиль усиления преобразован в минимальное ограничение усиления на инверсию функции чувствительности, inv (S) = (I + L).
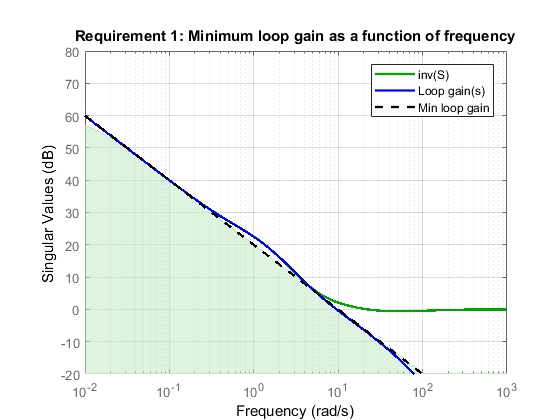
Следующий рисунок показывает типичный заданный минимальный профиль усиления (пунктирная линия) и получившееся настроенное усиление цикла, L (синяя линия). Теневая область представляет значения профиля усиления, которые запрещаются этой настраивающей целью. Рисунок показывает, что то, когда L намного больше, чем 1, налагая минимальное усиление на inv (S), является хорошим прокси для минимального коэффициента усиления разомкнутого контура.
TuningGoal.MinLoopGain и TuningGoal.MaxLoopGain задайте только низкое усиление или ограничения высокого усиления в определенных диапазонах частот. Когда вы используете эти настраивающие цели, systune и looptune определите лучшую форму цикла около перекрестного соединения. Когда форма цикла около перекрестного соединения проста или хорошо изученная (такие как интегральное действие), можно использовать TuningGoal.LoopShape задавать ту целевую форму цикла.
Req = TuningGoal.MinLoopGain(location,loopgain)loopgain.
Можно задать минимальный профиль усиления как сглаженную передаточную функцию или делать набросок кусочного ошибочного профиля с помощью frd модель или makeweight (Robust Control Toolbox) команда. Только получите значения, больше, чем 1, осуществляются.
Для обратной связи MIMO заданный профиль усиления интерпретирован как нижняя граница на самом маленьком сингулярном значении L.
Req = TuningGoal.MinLoopGain(location,fmin,gmin)loopgain = K/s (интегральное действие). Программное обеспечение выбирает K таким образом, что значением усиления является gmin на заданной частоте, fmin.
|
Местоположение, в котором максимальный коэффициент усиления разомкнутого контура ограничивается в виде вектора символов или массива ячеек из символьных векторов, которые идентифицируют одно или несколько местоположений в системе управления, чтобы настроиться. То, какие открывающие цикл местоположения доступны, зависит от того, какую систему вы настраиваете:
Если |
|
Минимальный коэффициент усиления разомкнутого контура в зависимости от частоты. Можно задать loopgain = frd([100 100 10],[0 1e-1 1]); Когда вы используете Только получите значения, больше, чем 1, осуществляются. Для мультивхода, мультивыход (MIMO) обратная связь, профиль усиления интерпретирован как нижняя граница на самом маленьком сингулярном значении Если вы настраиваетесь в дискретное время (то есть, с помощью a |
|
Частота минимального усиления Используйте этот аргумент, чтобы задать минимальный профиль усиления формы |
|
Значение минимального усиления, происходящего в Используйте этот аргумент, чтобы задать минимальный профиль усиления формы |
|
Минимальный коэффициент усиления разомкнутого контура в зависимости от частоты в виде SISO Программное обеспечение автоматически сопоставляет входной параметр Используйте |
|
Диапазон частот, в котором настройка цели осуществляется в виде вектора-строки из формы Установите Req.Focus = [1,100]; Значение по умолчанию: |
|
Требование устойчивости к динамике с обратной связью в виде 1 ( Когда Значение по умолчанию: 1 ( |
|
Переключитесь для того, чтобы автоматически масштабировать сигналы цикла в виде В многоконтурном или системах управления MIMO, каналы обратной связи автоматически перемасштабируются, чтобы компенсировать недиагональные условия в передаточной функции разомкнутого контура (периоды взаимодействия цикла). Установите Значение по умолчанию: |
|
Местоположение, в котором минимальное усиление цикла ограничивается в виде массива ячеек из символьных векторов, которые идентифицируют одну или несколько аналитических точек в системе управления, чтобы настроиться. Например, если Значение |
|
Модели, к которым настраивающаяся цель применяется в виде вектора из индексов. Используйте Req.Models = 2:4; Когда Значение по умолчанию: |
|
Обратная связь, чтобы открыться при оценке настраивающейся цели в виде массива ячеек из символьных векторов, которые идентифицируют открывающие цикл местоположения. Настраивающаяся цель оценена против настройки разомкнутого контура, созданной вводной обратной связью в местоположениях, которые вы идентифицируете. Если вы используете настраивающуюся цель настроить модель Simulink системы управления, то Если вы используете настраивающуюся цель настроить обобщенное пространство состояний ( Например, если Значение по умолчанию: |
|
Имя настраивающейся цели в виде вектора символов. Например, если Req.Name = 'LoopReq'; Значение по умолчанию: |
Создайте настраивающуюся цель, которая повышает коэффициент усиления разомкнутого контура обратной связи, по крайней мере, к заданному профилю.
Предположим, что вы настраиваете систему управления, которая имеет открывающее цикл расположение, идентифицированное PILoop. Укажите, что коэффициент усиления разомкнутого контура, измеренный в том местоположении, превышает минимальное усиление 10 на 20 дБ ниже 0,1 рад/с, прокручивающихся прочь на уровне-20 дБ/декабрей на более высоких частотах. Используйте frd модель, чтобы делать набросок этого профиля усиления.
loopgain = frd([10 10 0.1],[0 1e-1 10]);
Req = TuningGoal.MinLoopGain('PILoop',loopgain);Программное обеспечение преобразует loopgain в сглаженную функцию частоты, которая аппроксимирует кусочно заданный профиль усиления. Отобразите настраивающуюся цель с помощью viewGoal.
viewGoal(Req)

Пунктирная линия показывает заданному профиль усиления. Теневая область указывает, где настраивающаяся цель нарушена, за исключением того, что значения усиления меньше чем 1 не осуществляется. Поэтому эта настраивающая цель только задает минимальное усиление на частотах ниже 1 рад/с.
Можно использовать Req как вход к looptune или systune при настройке системы управления. Затем используйте viewGoal(Req,T) сравнить настроенное усиление цикла с минимальным усилением задало в настраивающейся цели, где T представляет настроенную систему управления.
Создайте настраивающуюся цель, которая задает минимальный профиль усиления цикла формы L = K / s. Профиль усиления достигает значения-20 дБ (0.01) на уровне 100 рад/с.
Req = TuningGoal.MinLoopGain('X',100,0.01);
viewGoal(Req)
viewGoal подтверждает, что настраивающаяся цель правильно задана. Можно использовать эту настраивающую цель настроить систему управления, которая имеет открывающее цикл расположение, идентифицированное как 'X'. Начиная со значений усиления цикла меньше чем 1 проигнорирован, эта настраивающая цель указывает, что минимум получает только ниже 1 рад/с без ограничения на усиление цикла на более высокой частоте.
Несмотря на то, что заданный профиль усиления (пунктирная линия) является чистым интегратором по числовым причинам, профиль усиления, осуществленный во время настройки, выравнивается в очень низких частотах, как описано в Алгоритмах. Чтобы видеть упорядоченный профиль усиления, расширьте оси целевого настройкой графика.
xlim([10^-4,10^2]) ylim([-20,80])

Теневая область отражает модифицированный профиль усиления.
Исследуйте минимальный настраивающий гол усиления цикла против настроенного усиления цикла. Минимальная настраивающая цель усиления цикла преобразована в ограничение на усиление функции чувствительности в местоположении, заданном в настраивающейся цели.
Чтобы видеть это отношение между минимальным усилением цикла и функцией чувствительности, настройте следующую систему с обратной связью с аналитическими точками в X1 и X2. Система управления имеет настраиваемые ПИД-регуляторы C1 и C2.

Создайте модель системы управления.
G2 = zpk([],-2,3); G1 = zpk([],[-1 -1 -1],10); C20 = tunablePID('C2','pi'); C10 = tunablePID('C1','pid'); X1 = AnalysisPoint('X1'); X2 = AnalysisPoint('X2'); InnerLoop = feedback(X2*G2*C20,1); CL0 = feedback(G1*InnerLoop*C10,X1); CL0.InputName = 'r'; CL0.OutputName = 'y';
Задайте некоторые настраивающиеся цели, включая минимальное усиление цикла. Настройте систему управления на эти требования.
Rtrack = TuningGoal.Tracking('r','y',10,0.01); Rreject = TuningGoal.Gain('X2','y',0.1); Rgain = TuningGoal.MinLoopGain('X2',100,10000); Rgain.Openings = 'X1'; opts = systuneOptions('RandomStart',2); rng('default'); % for reproducibility [CL,fSoft] = systune(CL0,[Rtrack,Rreject,Rgain]);
Final: Soft = 1.07, Hard = -Inf, Iterations = 115
Some closed-loop poles are marginally stable (decay rate near 1e-07)
Исследуйте TuningGoal.MinLoopGain гол против соответствующего настроенного ответа.
viewGoal(Rgain,CL)

График показывает достигнутое усиление цикла для цикла в X2 (синяя линия). График также показывает инверсию достигнутой функции чувствительности, S, в местоположении X2 (зеленая линия). Обратная функция чувствительности в этом местоположении дана inv(S) = I+L. Здесь, L разомкнутый контур передача цикла "точка-точка", измеренная в X2.
Минимальный цикл получает целевой Rgain ограничение на inv(S), представленный в графике зеленой теневой области. Ограничение на inv(S) может считаться минимальным ограничением усиления на L это применяется где усиление L (или самое маленькое сингулярное значение L, для циклов MIMO), больше 1.
Создайте требования, которые задают минимальное усиление цикла 20 дБ (100) на уровне 50 рад/с и максимальное усиление цикла-20 дБ (0.01) на уровне 1 000 рад/с на внутреннем цикле следующей системы управления.

Создайте максимальные и минимальные требования усиления цикла.
RMinGain = TuningGoal.MinLoopGain('X2',50,100); RMaxGain = TuningGoal.MaxLoopGain('X2',1000,0.01);
Сконфигурируйте требования, чтобы примениться к усилению цикла внутреннего цикла, измеренного с открытым внешним контуром.
RMinGain.Openings = 'X1'; RMaxGain.Openings = 'X1';
Установка Req.Openings говорит настраивающемуся алгоритму осуществлять требования с циклом, открытым в заданном местоположении. С открытым внешним контуром требования применяются только к внутреннему циклу.
По умолчанию, настройка использования TuningGoal.MinLoopGain или TuningGoal.MaxLoopGain налагает требование устойчивости, а также минимальное или максимальное усиление цикла. Практически, в некоторых системах управления не возможно достигнуть устойчивого внутреннего цикла. В этом случае удалите требование устойчивости для внутреннего цикла путем установки Stabilize свойство к false.
RMinGain.Stabilize = false; RMaxGain.Stabilize = false;
Когда вы настраиваете использование любого из этих требований, настраивающийся алгоритм все еще налагает требование устойчивости к полной настроенной системе управления, но не к одному только внутреннему циклу.
Эта настраивающая цель налагает неявное ограничение устойчивости на функцию чувствительности с обратной связью, измеренную в Location, оцененный с циклами, открытыми в точках, идентифицирован в Openings. Движущими силами, затронутыми этим неявным ограничением, является stabilized dynamics для этой настраивающей цели. MinDecay и MaxRadius опции systuneOptions управляйте границами на этих неявно ограниченных движущих силах. Если оптимизации не удается соответствовать границам по умолчанию, или если конфликт границ по умолчанию с другими требованиями, использовать systuneOptions изменить эти значения по умолчанию.
Когда вы настраиваете систему управления с помощью TuningGoal, программное обеспечение преобразует настраивающуюся цель в нормированное скалярное значение f (x). Здесь, x является вектором из свободных (настраиваемых) параметров в системе управления. Программное обеспечение затем настраивает значения параметров, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающейся целью является трудное ограничение.
Для TuningGoal.MinLoopGain, f (x) дают:
Здесь, D является масштабированием диагонали (для циклов MIMO). S является функцией чувствительности в Location. WS является функцией взвешивания частоты, выведенной из минимального профиля усиления цикла, MinGain. Усиление этой функции примерно совпадает с MaxGain для значений в пределах от-20 дБ к 60 дБ. По числовым причинам функция взвешивания выравнивается вне этой области значений, если заданный профиль усиления не изменяет наклон вне этой области значений. Эта корректировка называется regularization. Поскольку полюса WS близко к s = 0 или s = Inf может привести к плохому числовому созданию условий systune задача оптимизации, не рекомендуется задать профили усиления с очень низкочастотной или очень высокочастотной динамикой.
Чтобы получить WS, используйте:
WS = getWeight(Req,Ts)
где Req настраивающаяся цель и Ts шаг расчета, в котором вы настраиваетесь (Ts = 0 в течение непрерывного времени). Для получения дополнительной информации о регуляризации и ее эффектах, смотрите, Визуализируют Настраивающиеся Цели.
Несмотря на то, что S является передаточной функцией с обратной связью, управление f (x) <1 эквивалентно осуществлению нижней границы на передаточной функции разомкнутого контура, L, в диапазоне частот, где усиление L больше 1. Чтобы видеть почему, обратите внимание что S = 1 / (1 + L). Для циклов SISO, когда |L |>> 1, |S | ≈ 1 / | L |. Поэтому осуществление требования усиления минимума разомкнутого контура, |L |> |WS |, примерно эквивалентно осуществлению |WsS | <1. Для циклов MIMO подобное обоснование применяется, с || S || ≈ 1/σmin (L), где min σ является самым маленьким сингулярным значением.
Для примера, иллюстрирующего ограничение на S, смотрите Минимальное Усиление Цикла как Ограничение на Функцию Чувствительности.
evalGoal | looptune | sigma | systune | TuningGoal.Gain | TuningGoal.LoopShape | TuningGoal.Margins | TuningGoal.MaxLoopGain | viewGoal | looptune (for slTuner) (Simulink Control Design) | slTuner (Simulink Control Design) | systune
(for slTuner) (Simulink Control Design)
