Проект корневого годографа является методом разработки системы общего контроля, в котором вы редактируете усиление компенсатора, полюса и нули в схеме корневого годографа.
Как коэффициент усиления разомкнутого контура, k, системы управления варьируется в непрерывной области значений значений, схема корневого годографа показывает траектории полюсов с обратной связью системы с обратной связью. Например, в следующей системе слежения:
P (s) является объектом, H (s) является динамикой датчика, и k является корректируемым скалярным усилением, из которого полюса с обратной связью являются корнями
Метод корневого годографа состоит из графического вывода траекторий полюса с обратной связью в комплексной плоскости, когда k варьируется. Можно использовать этот график идентифицировать значение усиления, сопоставленное с желаемым набором полюсов с обратной связью.
В этом примере показано, как спроектировать компенсатор для электрогидравлического сервомеханизма с помощью корневого годографа графические настраивающие методы.
Модель объекта управления
Простая версия электрогидравлической модели сервомеханизма состоит из
Двухтактный усилитель (пара электромагнитов)
Скользящий золотник в судне гидравлической жидкости высокого давления
Открытия клапана в судне, чтобы позволить, чтобы жидкость текла
Центральная емкость с управляемым поршнем поршнем, чтобы обеспечить силу загрузке
Симметричное жидкое судно возврата
Сила на золотнике пропорциональна току в обмотке электромагнита. Когда золотник перемещается, клапан открывается, позволяя гидравлической жидкости высокого давления течь через емкость. Движущаяся жидкость воздействует на поршень, чтобы переместиться в противоположное направление золотника. Для получения дополнительной информации об этой модели, включая деривацию линеаризовавшей модели, см. [1].
Можно использовать входное напряжение для электромагнита, чтобы управлять положением поршня. Когда измерения положения поршня доступны, можно использовать обратную связь для управления положением поршня, как показано в следующем, где Gservo представляет сервомеханизм:

Конструктивные требования
В данном примере настройте компенсатор, C (s), чтобы удовлетворить следующие требования переходного процесса с обратной связью:
2%-е время урегулирования меньше 0,05 секунд.
Максимальное перерегулирование меньше 5%.
Открытый Control System Designer
В командной строке MATLAB® загрузите линеаризовавшую модель сервомеханизма и откройте Control System Designer в редакторе корневого годографа настройка.
load ltiexamples Gservo controlSystemDesigner('rlocus',Gservo);
Приложение открывает и импортирует Gservo как модель объекта управления для архитектуры управления по умолчанию, Configuration 1.
В Control System Designer, графике Root Locus Editor и вводе - выводе открытый Step Response.
Чтобы просмотреть частотную характеристику разомкнутого контура и переходной процесс с обратной связью одновременно, перетащите графики к желаемому местоположению.
Отображения приложения Bode Editor и Step Response строят рядом друг с другом.
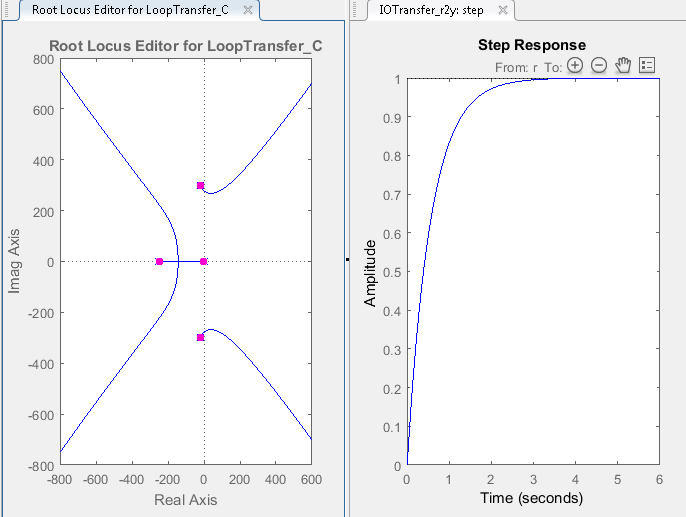
В переходном процессе с обратной связью время нарастания составляет приблизительно две секунды, который не удовлетворяет конструктивным требованиям.
Заставить корневой годограф схематически изобразить легче читать, увеличить масштаб. В Root Locus Editor щелкните правой кнопкой по области построения и выберите Properties.
В диалоговом окне Property Editor, на вкладке Limits, задают Real Axis и пределы Imaginary Axis от -500 к 500.
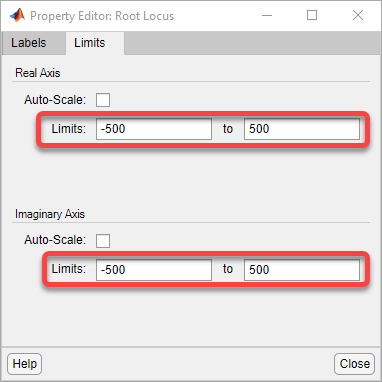
Нажмите Close.
Увеличьте усиление компенсатора
Чтобы создать более быстрый ответ, увеличьте усиление компенсатора. В Root Locus Editor щелкните правой кнопкой по области построения и выберите Edit Compensator.
В диалоговом окне Compensator Editor задайте усиление 20.
В графике Root Locus Editor местоположения полюса с обратной связью перемещаются, чтобы отразить новое значение усиления. Кроме того, обновления графика Step Response.
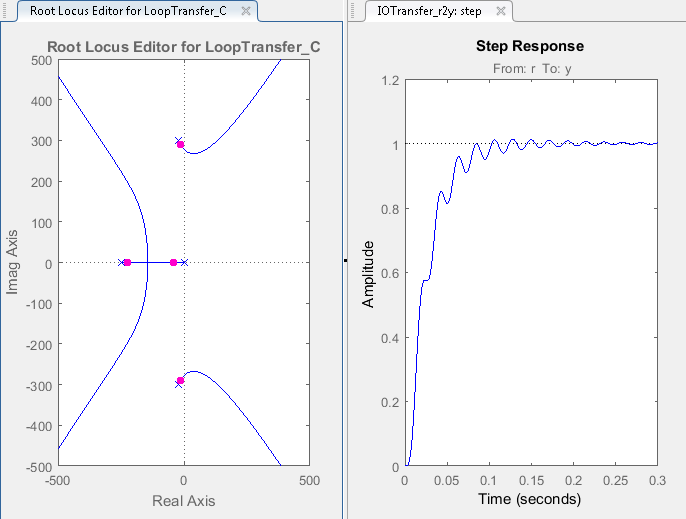
Ответ с обратной связью не удовлетворяет требованию времени урегулирования и показывает нежелательный вызов.
Увеличение усиления делает систему underdamped и дальнейший вывод увеличений к нестабильности. Поэтому, чтобы соответствовать конструктивным требованиям, необходимо задать дополнительную динамику компенсатора. Для получения дополнительной информации о добавлении и редактировании динамики компенсатора, смотрите Динамику Компенсатора Редактирования.
Добавьте полюса в компенсатор
Чтобы добавить комплексную пару полюса в компенсатор, в Root Locus Editor, щелкают правой кнопкой по области построения и выбирают Add Pole/Zero> Complex Pole. Кликните по области построения, где вы хотите добавить один из комплексных полюсов.
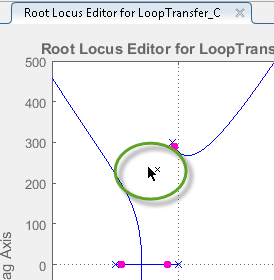
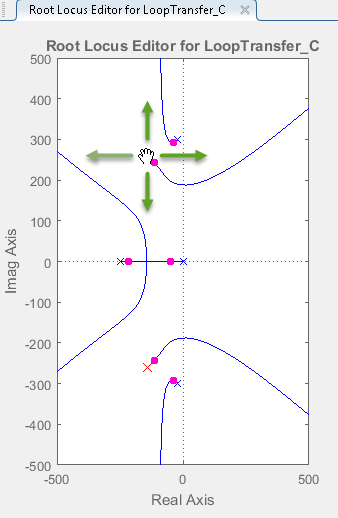
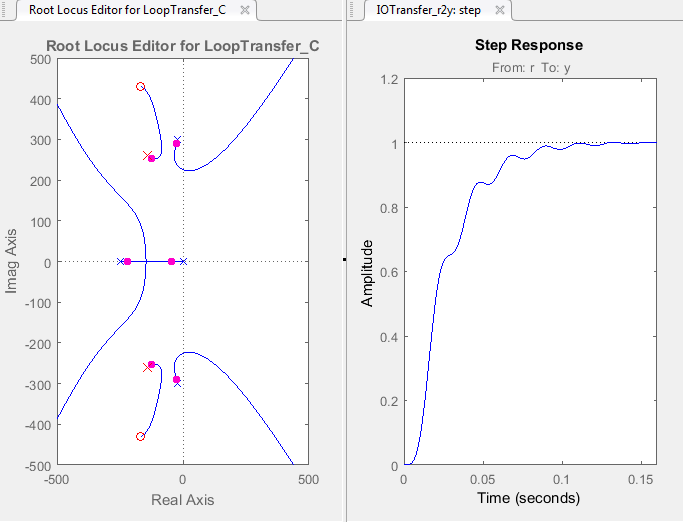
Приложение добавляет комплексную пару полюса в график корневого годографа как красный Xи обновления переходный процесс.
В Root Locus Editor перетащите новые полюса к местоположениям около –140 ± 260i. Когда вы перетаскиваете один полюс, другой полюс обновляется автоматически.
Совет
Когда вы перетаскиваете полюс или нуль, отображения приложения новое значение в строке состояния, на правой стороне.

Добавьте нули в компенсатор
Чтобы добавить комплексную нулевую пару в ваш компенсатор, в диалоговом окне Compensator Editor, щелкают правой кнопкой по таблице Dynamics и выбирают Add Pole/Zero> Complex Zero
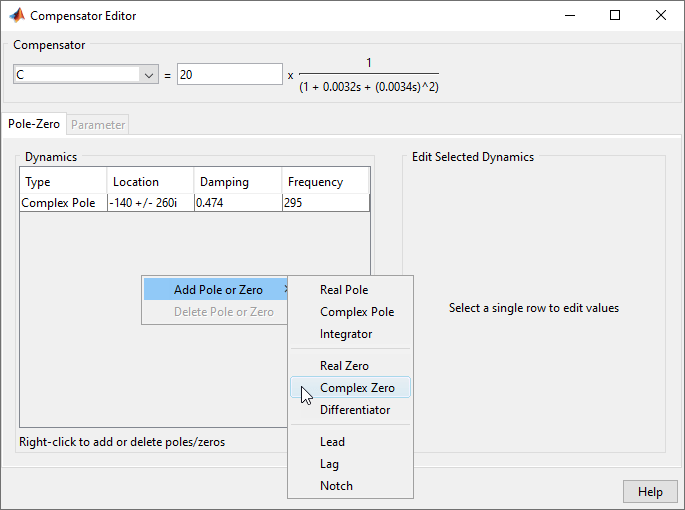
Приложение добавляет пару комплексных нулей в –1 ± i к вашему компенсатору
В таблице Dynamics кликните по строке Complex Zero. Затем в разделе Edit Selected Dynamics, задайте Real Part -170 и Imaginary Part 430.
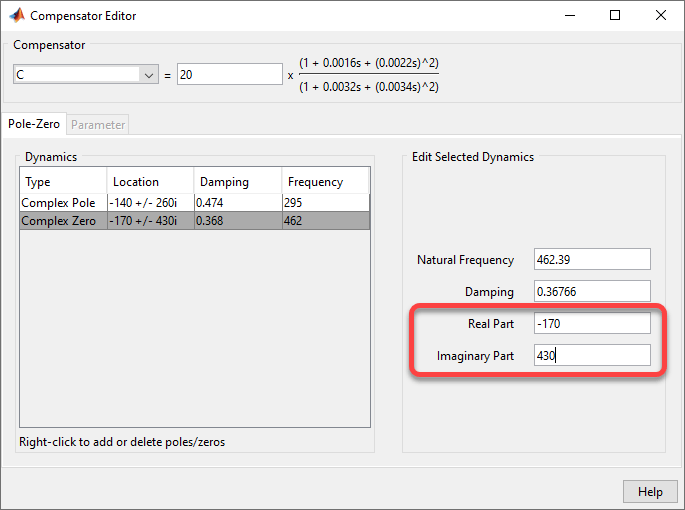
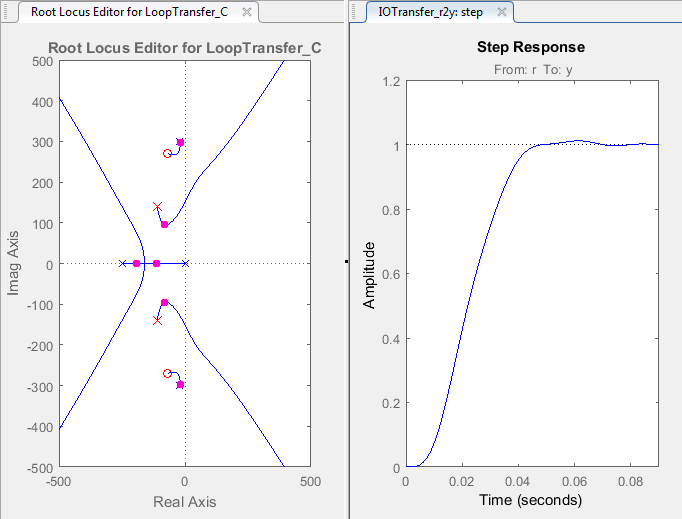
Компенсатор и графики отклика автоматически обновляются, чтобы отразить новые нулевые местоположения.
В графике Step Response время урегулирования составляет приблизительно 0,1 секунды, который не удовлетворяет конструктивным требованиям.
Настройте положения полюсов и нулей
Процесс проектирования компенсатора может включить некоторый метод проб и ошибок. Настройте усиление компенсатора, местоположения полюса, и обнулите местоположения, пока вы не будете соответствовать критериям расчета.
Один возможный проект компенсатора, который удовлетворяет конструктивным требованиям:
Усиление компенсатора 10
Комплексные полюса в –110 ± 140i
Комплексные нули в –70 ± 270i
В диалоговом окне Compensator Editor сконфигурируйте свой компенсатор с помощью этих значений. В графике Step Response время урегулирования составляет приблизительно 0,05 секунды.
Чтобы проверить точное время урегулирования, щелкните правой кнопкой по области построения Step Response и выберите Characteristics> Settling Time. Индикатор времени урегулирования появляется на графике отклика.
Чтобы просмотреть время урегулирования, переместите курсор через индикатор времени урегулирования.
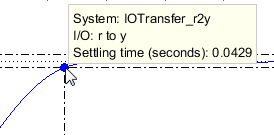
Время урегулирования составляет приблизительно 0,043 секунды, который удовлетворяет конструктивным требованиям.
[1] Кларк, R. N. Динамика системы управления, издательство Кембриджского университета, 1996.
Control System Designer | rlocusplot
