Преобразуйте агента от координат кубоида до 3D координат симуляции
Automated Driving Toolbox / Управление Сценарием и Моделирование Датчика
Блок Cuboid To 3D Simulation преобразует положение агента кубоида в мировых координатах к X, Y и координатам Yaw, используемым блоком Simulation 3D Vehicle with Ground Following. Используйте конвертированные значения, чтобы установить положения транспортного средства в 3D среде симуляции для агентов, созданных с помощью приложения Driving Scenario Designer. Наземный ландшафт сцены определяет крен (x - вращение оси), тангаж (y - вращение оси), и вертикальное изменение (z - положение оси) транспортного средства.
Можно задать шину, содержащую одно положение агента или несколько положений агента. По умолчанию блок преобразует положение первого агента в шине. Чтобы задать агента, положение которого вы хотите преобразовать, задайте ActorID из того агента.
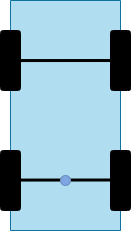
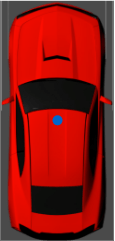
В кубоиде и 3D симуляции ведущие сценарии, системы координат являются тем же самым, но источники транспортных средств отличаются. В кубоиде ведущие сценарии источник транспортного средства находится на земле под центром задней оси. Блок преобразовывает этот источник, до начала координат используемый в 3D среде симуляции, которая находится под геометрическим центром транспортного средства. Таблица показывает различие в источнике между этими двумя средами.
| Источник транспортного средства кубоида | 3D источник транспортного средства симуляции |
|---|---|
|
|
Scenario Reader | Simulation 3D Vehicle with Ground Following | Vehicle To World | World To Vehicle