Траектория Waypoint в геодезических координатах
geoTrajectory Система object™ генерирует траектории на основе waypoints в геодезических координатах. Когда вы создаете Системный объект, можно задать время прибытия, скорость и ориентацию в каждом waypoint. geoTrajectory Системный объект включает три системы координат. Для получения дополнительной информации смотрите Координатные Системы координат в Гео Траектории.
Сгенерировать сосредоточенную Землей waypoint траекторию в геодезических координатах:
Создайте geoTrajectory объект и набор его свойства.
Вызовите объект, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты?.
trajectory = geoTrajectory(Waypoints,TimeOfArrival)geoTrajectory Системный объект, trajectory, на основе заданного геодезического waypoints, Waypoints, и соответствующее время, TimeOfArrival.
trajectory = geoTrajectory(Waypoints,TimeOfArrival,Name,Value)Name к заданному Value. Незаданные свойства и аргументы создания имеют значение по умолчанию или выведенные значения.
trajectory = geoTrajectory([10,10,1000;10,11,1100],[0,3600]) создает геодезический waypoint Системный объект траектории, geojectory, это перемещает одну степень в области долготы и 100 метров в высоте через один час.Аргументы создания являются свойствами, которые установлены во время создания Системного объекта и не могут быть изменены позже. Если вы явным образом не устанавливаете значение аргумента создания, значение свойства выведено.
Можно задать Waypoints и TimeOfArrival в качестве аргументов только для значения или пар "имя-значение".
[ выводит систему координат данных о траектории на основе заданных аргументов создания и свойств, где positionLLA,orientation,velocity,acceleration,angularVelocity,ecef2ref] = trajectory()trajectory geoTrajectory объект.
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
geoTrajectory и ищите положениеСоздайте geoTrajectory со стартовым LLA в [15 15 0] и конечным LLA в [75 75 100]. Установите время полета на десять часов. Производите траекторию каждые 1000 секунд.
startLLA = [15 15 0];
endLLA = [75 75 100];
timeOfTravel = [0 3600*10];
sampleRate = 0.001;
trajectory = geoTrajectory([startLLA;endLLA],timeOfTravel,'SampleRate',sampleRate);Выведите LLA waypoints траектории.
positionsLLA = startLLA; while ~isDone(trajectory) positionsLLA = [positionsLLA;trajectory()]; end positionsLLA
positionsLLA = 37×3
15.0000 15.0000 0
16.6667 16.6667 2.7778
18.3333 18.3333 5.5556
20.0000 20.0000 8.3333
21.6667 21.6667 11.1111
23.3333 23.3333 13.8889
25.0000 25.0000 16.6667
26.6667 26.6667 19.4444
28.3333 28.3333 22.2222
30.0000 30.0000 25.0000
⋮
Ищите Декартов waypoints траектории в системе координат ECEF при помощи lookupPose функция.
sampleTimes = 0:1000:3600*10;
n = length(sampleTimes);
positionsCart = lookupPose(trajectory,sampleTimes,'ECEF');Визуализируйте результаты в системе координат ECEF.
figure() km = 1000; plot3(positionsCart(1,1)/km,positionsCart(1,2)/km,positionsCart(1,3)/km, 'b*'); hold on; plot3(positionsCart(end,1)/km,positionsCart(end,2)/km,positionsCart(end,3)/km, 'bo'); plot3(positionsCart(:,1)/km,positionsCart(:,2)/km,positionsCart(:,3)/km,'b'); plot3([0 positionsCart(1,1)]/km,[0 positionsCart(1,2)]/km,[0 positionsCart(1,3)]/km,'k:'); plot3([0 positionsCart(end,1)]/km,[0 positionsCart(end,2)]/km,[0 positionsCart(end,3)]/km,'k:'); xlabel('x (km)'); ylabel('y (km)'); zlabel('z (km)'); legend('Start position','End position', 'Trajectory')

geoTrajectory Системный объект включает три координатных системы координат:
ECEF (Земля Фиксированная Земля В центре) система координат
Система координат локальной ссылки: локальный NED (на северо-восток вниз) или система координат ENU (Восточный Север)
Целевая система координат тела
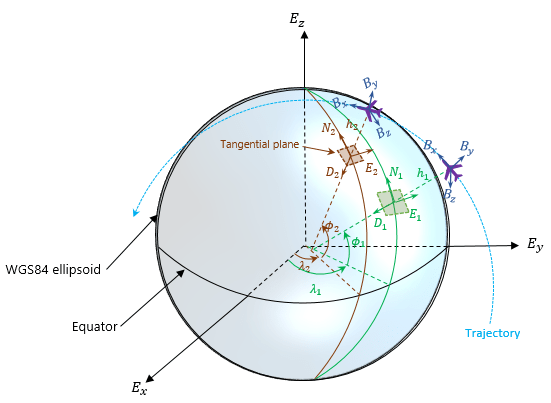
Рисунок показывает сосредоточенную Землей траекторию с двумя подсвеченными waypoints. Фигуры используют систему координат локальной ссылки NED в качестве примера, но можно, конечно, использовать систему координат локальной ссылки ENU. На рисунке,
x E, E y и E, z является тремя осями системы координат ECEF, которая закрепляется на Земле.
B x, B y и B, z является тремя осями целевой системы координат тела, которая закрепляется на цели.
N, E и D являются тремя осями локальной системы координат NED. Фигура подсвечивает две локальных системы координат NED, N 1-E1-D1 и N 2-E2-D2. Источник каждой локальной системы координат NED является Наземной точкой поверхности, соответствующей траектории waypoint на основе модели эллипсоида WGS84. Горизонтальная плоскость локальной системы координат NED является касательной на поверхность модели эллипсоида WGS84.
λ и ϕ являются геодезической долготой и широтой, соответственно. Ориентация цели при помощи локального соглашения системы координат NED задана как вращение от локальной системы координат NED до системы координат тела цели, такой как вращение от N 1-E1-D1 к B x-By-Bz.