Имитационная модель IMU
Sensor Fusion and Tracking Toolbox / Расположение Мультидатчика / Модели Датчика
Navigation Toolbox / Расположение Мультидатчика / Модели Датчика
Модели блока IMU Simulink®, получающие данные из инерциального измерительного блока (IMU), состоявшего из акселерометра, гироскопа и датчиков магнитометра.
Модель акселерометра использует ориентацию основной истины и ускоряющие входные параметры и imuSensor и accelparams Свойства (Sensor Fusion and Tracking Toolbox) смоделировать показания акселерометра.
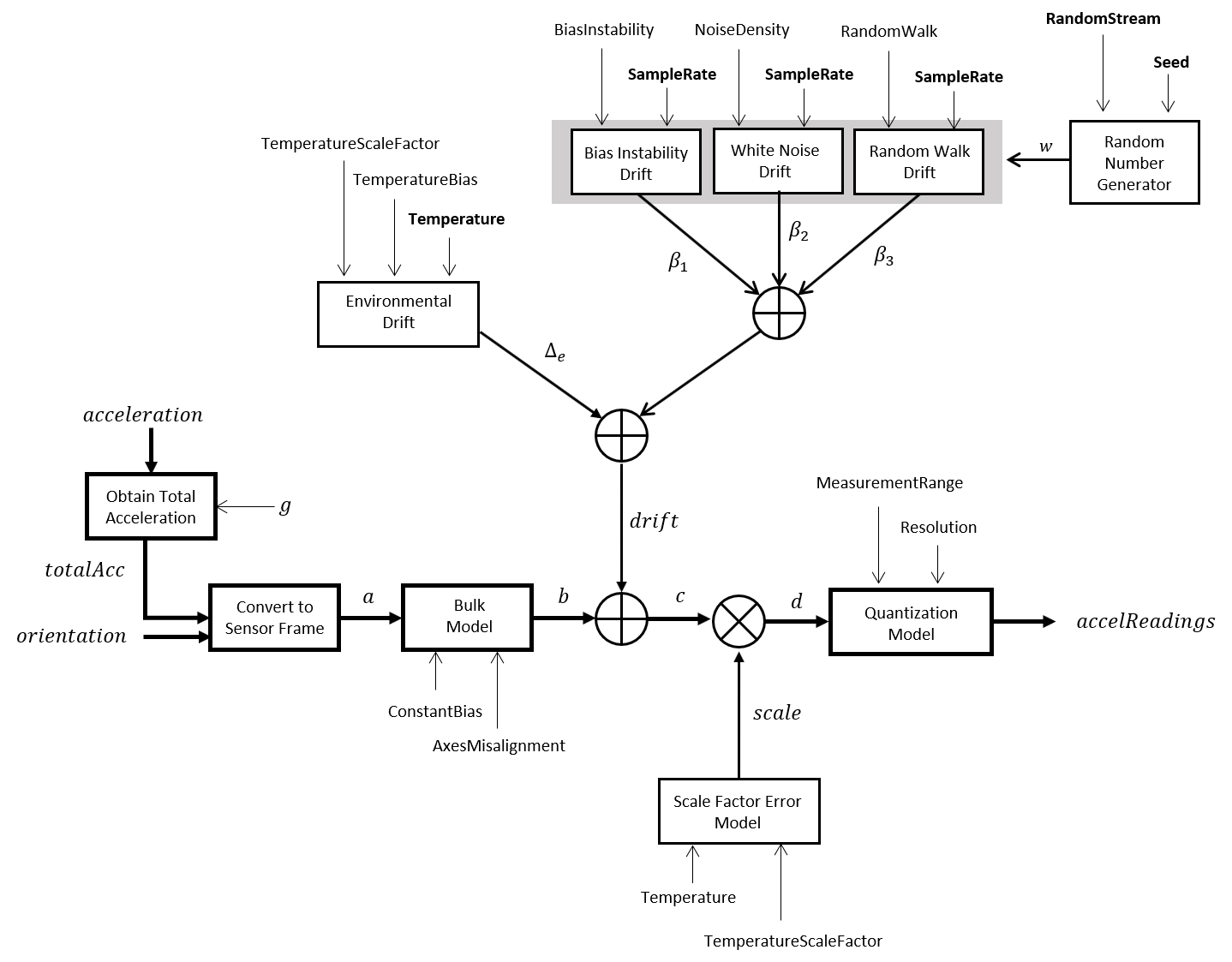
Чтобы получить общее ускорение (totalAcc), ускорение предварительно обрабатывается путем отрицания и добавления силы тяжести постоянный вектор (g = [0; 0; 9.8] m/s2) как:
Затем общее ускорение преобразовано от локальной системы координат навигации до использования системы координат датчика:
Если ориентация вводится в форме кватерниона, она преобразована в матрицу вращения перед обработкой.
Ускорение основной истины в системе координат датчика, a, проходит через объемную модель, которая добавляет неточное совмещение осей и смещение:
где ConstantBias (Sensor Fusion and Tracking Toolbox) является свойством accelparams (Sensor Fusion and Tracking Toolbox) и α 1, α 2, и α 3 даны первыми, вторыми, и третьими элементами свойства AxesMisalignment (Sensor Fusion and Tracking Toolbox) accelparams (Sensor Fusion and Tracking Toolbox).
Дрейф нестабильности смещения моделируется как белый смещенный шум и затем отфильтрованный:
где BiasInstability (Sensor Fusion and Tracking Toolbox) является свойством accelparams (Sensor Fusion and Tracking Toolbox) и h 1 являются фильтром, заданным свойством SampleRate (Sensor Fusion and Tracking Toolbox):
Белый шумовой дрейф моделируется путем умножения элементов белого шумового случайного потока стандартным отклонением:
где SampleRate (Sensor Fusion and Tracking Toolbox) является imuSensor свойством и NoiseDensity (Sensor Fusion and Tracking Toolbox) является accelparams Свойство (Sensor Fusion and Tracking Toolbox). Элементами w являются случайные числа, данные настройками imuSensor случайный поток.
Случайный дрейф обхода моделируется путем смещения элементов белого шумового случайного потока и затем фильтрации:
где RandomWalk (Sensor Fusion and Tracking Toolbox) является свойством accelparams (Sensor Fusion and Tracking Toolbox), SampleRate (Sensor Fusion and Tracking Toolbox) является свойством imuSensor, и h 2 является фильтром, заданным как:
Экологический шум дрейфа моделируется путем умножения перепада температур от стандарта с температурным смещением:
где Температура (Sensor Fusion and Tracking Toolbox) является свойством imuSensor, и TemperatureBias (Sensor Fusion and Tracking Toolbox) является свойством accelparams (Sensor Fusion and Tracking Toolbox). Постоянные 25 соответствуют стандартной температуре.
Температурная ошибка масштабного коэффициента моделируется как:
где Температура (Sensor Fusion and Tracking Toolbox) является свойством imuSensor, и TemperatureScaleFactor (Sensor Fusion and Tracking Toolbox) является свойством accelparams (Sensor Fusion and Tracking Toolbox). Постоянные 25 соответствуют стандартной температуре.
Квантование моделируется первым насыщением непрерывной модели сигнала:
и затем установка разрешения:
где MeasurementRange (Sensor Fusion and Tracking Toolbox) является свойством accelparams (Sensor Fusion and Tracking Toolbox).
Модель гироскопа использует ориентацию основной истины, ускорение, и входные параметры скорости вращения и imuSensor и gyroparams Свойства (Sensor Fusion and Tracking Toolbox) смоделировать показания акселерометра.
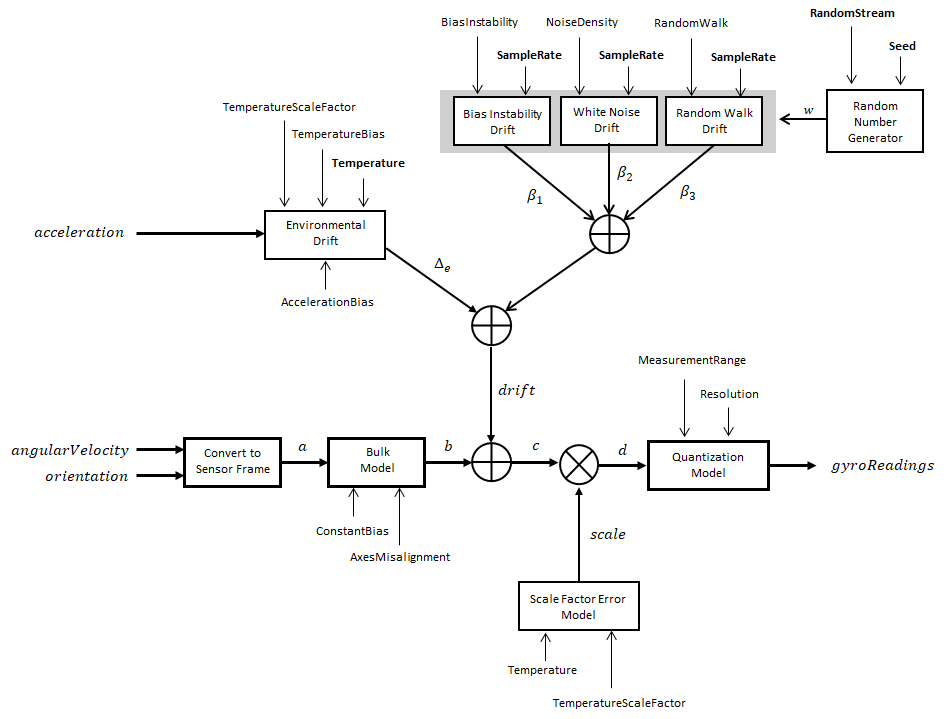
Скорость вращения основной истины преобразована от локальной системы координат до системы координат датчика с помощью ориентации основной истины:
Если ориентация вводится в форме кватерниона, она преобразована в матрицу вращения перед обработкой.
Скорость вращения основной истины в системе координат датчика, a, проходит через объемную модель, которая добавляет неточное совмещение осей и смещение:
где ConstantBias (Sensor Fusion and Tracking Toolbox) является свойством gyroparams (Sensor Fusion and Tracking Toolbox) и α 1, α 2, и α 3 даны первыми, вторыми, и третьими элементами свойства AxesMisalignment (Sensor Fusion and Tracking Toolbox) gyroparams (Sensor Fusion and Tracking Toolbox).
Дрейф нестабильности смещения моделируется как белый смещенный шум и затем отфильтрованный:
где BiasInstability (Sensor Fusion and Tracking Toolbox) является свойством gyroparams (Sensor Fusion and Tracking Toolbox) и h 1 являются фильтром, заданным свойством SampleRate (Sensor Fusion and Tracking Toolbox):
Белый шумовой дрейф моделируется путем умножения элементов белого шумового случайного потока стандартным отклонением:
где SampleRate (Sensor Fusion and Tracking Toolbox) является imuSensor свойством и NoiseDensity (Sensor Fusion and Tracking Toolbox) является gyroparams Свойство (Sensor Fusion and Tracking Toolbox). Элементами w являются случайные числа, данные настройками imuSensor случайный поток.
Случайный дрейф обхода моделируется путем смещения элементов белого шумового случайного потока и затем фильтрации:
где RandomWalk (Sensor Fusion and Tracking Toolbox) является свойством gyroparams (Sensor Fusion and Tracking Toolbox), SampleRate (Sensor Fusion and Tracking Toolbox) является свойством imuSensor, и h 2 является фильтром, заданным как:
Экологический шум дрейфа моделируется путем умножения перепада температур от стандарта с температурным смещением:
где Температура (Sensor Fusion and Tracking Toolbox) является свойством imuSensor, и TemperatureBias (Sensor Fusion and Tracking Toolbox) является свойством gyroparams (Sensor Fusion and Tracking Toolbox). Постоянные 25 соответствуют стандартной температуре.
Температурная ошибка масштабного коэффициента моделируется как:
где Температура (Sensor Fusion and Tracking Toolbox) является свойством imuSensor, и TemperatureScaleFactor (Sensor Fusion and Tracking Toolbox) является свойством gyroparams (Sensor Fusion and Tracking Toolbox). Постоянные 25 соответствуют стандартной температуре.
Квантование моделируется первым насыщением непрерывной модели сигнала:
и затем установка разрешения:
где MeasurementRange (Sensor Fusion and Tracking Toolbox) является свойством gyroparams (Sensor Fusion and Tracking Toolbox).
Модель магнитометра использует ориентацию основной истины и ускоряющие входные параметры и imuSensor и magparams Свойства (Sensor Fusion and Tracking Toolbox) смоделировать показания магнитометра.
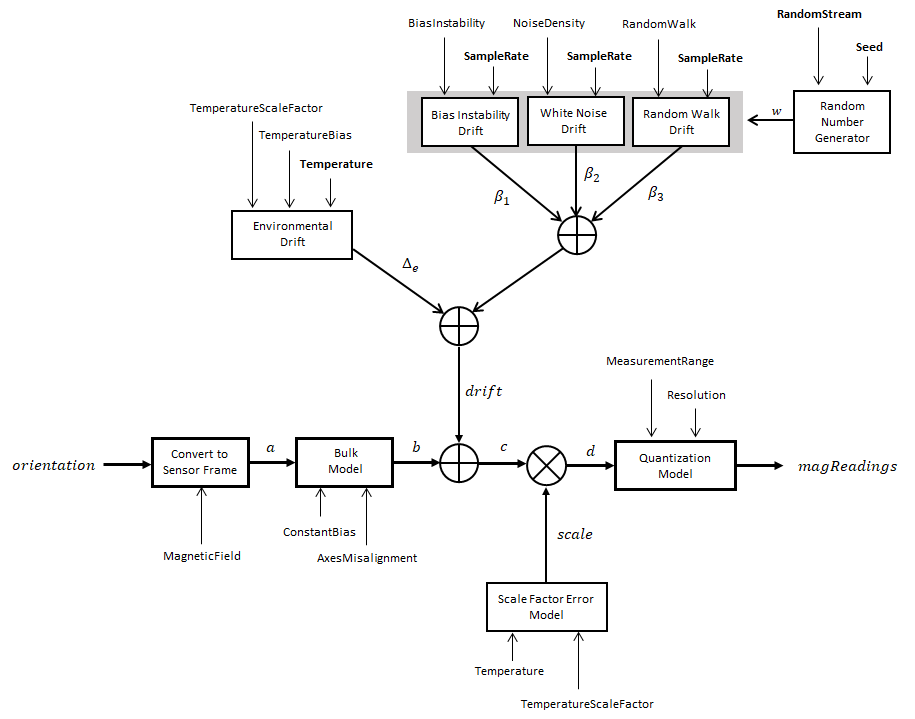
Ускорение основной истины преобразовано от локальной системы координат до системы координат датчика с помощью ориентации основной истины:
Если ориентация вводится в форме кватерниона, она преобразована в матрицу вращения перед обработкой.
Ускорение основной истины в системе координат датчика, a, проходит через объемную модель, которая добавляет неточное совмещение осей и смещение:
где ConstantBias (Sensor Fusion and Tracking Toolbox) является свойством magparams (Sensor Fusion and Tracking Toolbox) и α 1, α 2, и α 3 даны первыми, вторыми, и третьими элементами свойства AxesMisalignment (Sensor Fusion and Tracking Toolbox) magparams (Sensor Fusion and Tracking Toolbox).
Дрейф нестабильности смещения моделируется как белый смещенный шум и затем отфильтрованный:
где BiasInstability (Sensor Fusion and Tracking Toolbox) является свойством magparams (Sensor Fusion and Tracking Toolbox) и h 1 являются фильтром, заданным свойством SampleRate (Sensor Fusion and Tracking Toolbox):
Белый шумовой дрейф моделируется путем умножения элементов белого шумового случайного потока стандартным отклонением:
где SampleRate (Sensor Fusion and Tracking Toolbox) является imuSensor свойством и NoiseDensity (Sensor Fusion and Tracking Toolbox) является magparams Свойство (Sensor Fusion and Tracking Toolbox). Элементами w являются случайные числа, данные настройками imuSensor случайный поток.
Случайный дрейф обхода моделируется путем смещения элементов белого шумового случайного потока и затем фильтрации:
где RandomWalk (Sensor Fusion and Tracking Toolbox) является свойством magparams (Sensor Fusion and Tracking Toolbox), SampleRate (Sensor Fusion and Tracking Toolbox) является свойством imuSensor, и h 2 является фильтром, заданным как:
Экологический шум дрейфа моделируется путем умножения перепада температур от стандарта с температурным смещением:
где Температура (Sensor Fusion and Tracking Toolbox) является свойством imuSensor, и TemperatureBias (Sensor Fusion and Tracking Toolbox) является свойством magparams (Sensor Fusion and Tracking Toolbox). Постоянные 25 соответствуют стандартной температуре.
Температурная ошибка масштабного коэффициента моделируется как:
где Температура (Sensor Fusion and Tracking Toolbox) является свойством imuSensor, и TemperatureScaleFactor (Sensor Fusion and Tracking Toolbox) является свойством magparams (Sensor Fusion and Tracking Toolbox). Постоянные 25 соответствуют стандартной температуре.
Квантование моделируется первым насыщением непрерывной модели сигнала:
и затем установка разрешения:
где MeasurementRange (Sensor Fusion and Tracking Toolbox) является свойством magparams (Sensor Fusion and Tracking Toolbox).
gyroparams | magparams | accelparams (Sensor Fusion and Tracking Toolbox)
