Муфта сцепления с коническими пластинами, которые участвуют, когда нормальная сила превышает порог
Simscape / Автомобильная трансмиссия / Муфты
Блок Cone Clutch представляет муфту сцепления коническим интерфейсом контакта. Конический интерфейс уменьшает нормальную силу, требуемую для обязательства муфты путем создания действия втискивания между компонентами муфты, конусом и чашкой. Конические приложения муфты включают коробки передач синхронизатора, которые синхронизируют диск и управляемые скорости вала, чтобы включить более сглаженное обязательство между механизмами передачи.
Компонент чашки соединяется жёстко с карданным валом, вращающимся с ним как модуль. Конический компонент соединяется жёстко с управляемым валом, который находится в осевом выравнивании с карданным валом. Муфта участвует, когда конические слайды к чашке и нажимают плотно против ее внутренней поверхности. Трение в интерфейсе контакта конической чашки позволяет муфте передать вращательную степень между диском и управляемыми валами. Модель трения этого блока включает и статические и кинетические вклады трения, последний которых приводит к рассеиванию энергии во время промаха между компонентами чашки и конусом.
Блок Cone Clutch основан на блоке Fundamental Friction Clutch. Для полной модели муфты сцепления смотрите Fundamental Friction Clutch. В этом разделе рассматриваются специализированную модель, реализованную в блоке Cone Clutch.
Когда вы прикладываете нормальную силу, FN, блок Cone Clutch может применить два вида трения, кинетического и статического, к движению автомобильной трансмиссии. Муфта применяет кинетический момент трения только, когда одна ось автомобильной трансмиссии вращается относительно другой оси автомобильной трансмиссии. Муфта применяет статический момент трения, когда две блокировки осей автомобильной трансмиссии и вращаются вместе. Блок выполняет итерации посредством многоступенчатого тестирования, чтобы определить, когда заблокировать и разблокировать муфту.
Можно также позволить дать сбой. Когда сбой произойдет, муфта останется заблокированной или будет не мочь передать степень. Отказы могут произойти в требуемое время или из-за внешнего триггера в порте T.
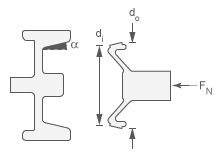
Рисунок показывает коническую геометрию муфты.
Сожмите переменные
| Параметр | Определение | Значение |
|---|---|---|
| d o | Наружный диаметр конической поверхности контакта | Смотрите предыдущую фигуру |
| d i | Внутренний диаметр конической поверхности контакта | Смотрите предыдущую фигуру |
| α | Коническая половина угла | Смотрите предыдущую фигуру |
| ω | Относительная скорость вращения (промах) | ω F – ω B |
| ω Tol | Подсуньте допуск к блокировке муфты | См. следующую модель |
| F N | Нормальная сила применилась к коническим поверхностям | Нормальная прикладывавшая сила, если больше, чем порог: F N> F th |
| α | Конический полуугол | Смотрите предыдущую фигуру |
| Эффективность r | Эффективный радиус крутящего момента | Эффективная рука момента силы трения муфты |
| k K | Кинетический коэффициент трения | Безразмерный коэффициент кинетического трения конических поверхностей трения. Функция ω. |
| k S | Статический коэффициент трения | Безразмерный коэффициент статического трения конических поверхностей трения. |
| τ K | Кинетический момент трения | См. следующую модель |
| τ S | Статический предел момента трения | (статическое трение достигает максимума фактор), · (кинетический момент трения для ω → 0) (См. следующую модель), |
Блок Cone Clutch основан на блоке Fundamental Friction Clutch. Вместо того, чтобы требовать кинетических и статических предельных крутящих моментов трения как входных сигналов, блок Cone Clutch вычисляет кинетическое и статическое трение от параметров муфты и входа, нормальная сила сигнализирует о FN.
Кинетический момент трения является продуктом четырех факторов:
Кинетический момент трения выступает против относительного промаха и применяется с полным знаком "минус". Это изменяет знак, когда ω изменяет знак.
Вы задаете кинетический коэффициент трения, kK, или как константа или как сведенная в таблицу дискретная функция относительной скорости вращения, ω. Сведенная в таблицу функция принята, чтобы быть симметричной для положительных и отрицательных величин относительной скорости вращения. Поэтому задайте k K для положительных значений ω только.
Эффективный радиус крутящего момента, reff, является эффективным радиусом, измеренным от оси автомобильной трансмиссии, в которой кинетические силы трения прикладываются во фрикционных поверхностях. Это связано с геометрией конической геометрии поверхности трения:
do и di являются максимумом поверхности контакта и минимальными диаметрами, соответственно.
Статический предел трения связан с кинетическим трением, установкой ω, чтобы обнулить и заменяющий кинетическое на статический коэффициент трения:
k S> k K, так, чтобы крутящий момент, τ, необходимый через муфту, чтобы разблокировать его путем преодоления статического трения, были больше, чем кинетическое трение в момент разблокирования, когда ω = 0.
Статический предел трения задает симметричные статические пределы момента трения как:
Область значений [τ S–, τ S +] используется Основной Муфтой сцепления.
Муфта участвует (крутящий момент передач), когда конические поверхности трения подвергаются положительной нормальной силе и генерируют кинетическое трение: F N> 0 и τK> 0.
Муфта блокирует, если и только если она занята, и промах меньше скоростного допуска: |ω | <ω Tol.
Степень, рассеянная муфтой, является |ω · τK |. Муфта рассеивает степень, только если это оба уменьшается (ω ≠ 0) и применяет кинетическое трение (τK> 0).
Можно смоделировать эффекты вращательного изменения скорости путем выбора зависимой скоростью модели. Чтобы выбрать зависимую скоростью модель, в настройках Friction, устанавливают параметр Friction model на Velocity-dependent kinetic friction coefficient. Для получения информации о модели трения, которая зависит и от скорости и от температуры, см. Тепловую, Зависимую Скоростью Модель.
Поскольку скоростной зависимый моделирует эти связанные параметры, становятся видимыми в настройках Friction:
Relative velocity vector
Kinetic friction coefficient vector
Friction coefficient interpolation method
Friction coefficient extrapolation method
Можно смоделировать эффекты теплового потока и изменения температуры путем выбора температурно-зависимой модели. Чтобы выбрать температурно-зависимую модель, в настройках Friction, устанавливают параметр Friction model на Temperature-dependent friction coefficients. Для получения информации о модели трения, которая зависит и от скорости и от температуры, см. Тепловую, Зависимую Скоростью Модель.
Для температурно-зависимой модели отображаются тепловой порт H и эти настройки:
В настройках Friction:
Temperature vector
Static friction coefficient vector
Kinetic friction coefficient vector
Friction coefficient interpolation method
Friction coefficient extrapolation method
В настройках Thermal Port:
Thermal mass
Initial Temperature
Можно смоделировать эффекты вращательного изменения скорости и теплового потока путем выбора зависимой скоростью и температурно-зависимой модели. Чтобы выбрать модель, которая зависит и от скорости и от температуры в настройках Friction, устанавливает параметр Friction model на Temperature and velocity-dependent friction coefficients.
Для зависимой скоростью и температурно-зависимой модели тепловой порт H и эти связанные настройки и параметры становятся видимыми:
В настройках Friction:
Relative velocity vector
Temperature vector
Static friction coefficient vector
Kinetic friction coefficient matrix
Friction coefficient interpolation method
Friction coefficient extrapolation method
В настройках Thermal Port:
Thermal mass
Initial Temperature
Можно включить дефектное поведение в ответ на:
Время симуляции — Сбой происходит в требуемое время.
Поведение симуляции — Сбой происходит в ответ на внешний триггер. Это отсоединяет порт T.
Можно выбрать или или обе из этих настроек для глыбовых дислокаций. Если сбой инициирован, муфта отвечает согласно установке Behavior when faulted для остатка от симуляции. Опции отказа:
Cannot transmit power
Cannot unlock
Можно установить блок выпускать дефектную ведомость как предупреждающее сообщение или сообщение об ошибке в Средстве просмотра Диагностики Simulink параметром Reporting when fault occurs.
Dog Clutch | Double-Sided Synchronizer | Fundamental Friction Clutch | Logic-Controlled Clutch | Synchronizer | Unidirectional Clutch
