Можно использовать гибкие блоки луча в Simscape™ Multibody™, чтобы смоделировать тонкие тела с постоянными поперечными сечениями, которые могут иметь маленькие и линейные эластичные деформации. Эти деформации включают расширение, изгиб и скрученность. Чтобы использовать эти блоки, в Library Browser, нажимают Simscape> Multibody> Body Elements> Flexible Bodies> Beams.
Следующий рисунок показывает гибкую модель луча канала. В этом примере луч подвергается и изгибу и скрученности под прикладной поперечной точечной нагрузкой. Степень, до которой повороты луча и скручивания меняется в зависимости от точки приложения силы в плоскости поперечного сечения. Введите smdoc_flexible_cantilever_channel в командной строке MATLAB®, чтобы открыть модель.
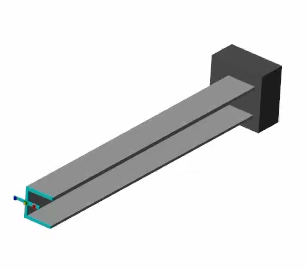
Геометрия луча является экструзией своего поперечного сечения. Общие поперечные сечения, с или без отверстий, поддерживаются блоком General Flexible Beam. Кроме того, поперечное сечение луча может принять много стандартных форм, таких как канал, угол и цилиндрическая пустота. Для лучей со стандартными перекрестными частными формами используйте следующие гибкие блоки луча:
Flexible Cylindrical Beam (и тело и пустота)
Flexible Rectangular Beam (и тело и пустота)
Каждый луч имеет две системы координат связи, пометил A и B. Каждая система координат связи имеет порт системы координат на блоке, который может соединиться с другим блоком. Системы координат связи расположены в концах луча и падения на z - ось системы координат локальной ссылки пометила R. Система координат служит просто в качестве внутренней ссылки для луча и не имеет никакого порта системы координат.
В Simscape Multibody все гибкие лучи могут иметь эластичный изгиб, осевые, и крутильные деформации. Лучи приняты, чтобы быть тонкими телами, длина которых должна далеко превысить свои полные перекрестные частные размерности, и все деформации должны быть линейными и маленькими.
Изгиб и осевые деформации луча следуют классический (Эйлер-Бернулли) теория луча. Изгиб может быть о любой оси в перекрестной частной плоскости (xy-плоскость) луча. Перекрестные частные срезы приняты, чтобы быть тверды в плоскости, останавливаться плоскими во время деформации и всегда быть перпендикулярными деформированной нейтральной оси луча. Скручивание луча выводит из Святой-Venant теории скрученности, и перекрестные частные срезы тверды в плоскости, но свободный деформироваться из плоскости.
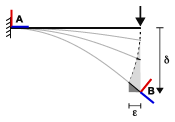
Когда одному или нескольким из этих предположений не соответствуют, результат может быть неточным. Например, на рисунке, консольный луч, который подвергается поперечной точечной нагрузке, получит неточный результат, когда изгибающаяся деформация, δ, будет большой. Во время изгиба свободный конец луча опускает перпендикулярно вместо следующего истинный физический путь, который обозначается точечной траекторией. Несоответствие, ε, увеличения как δ увеличиваются.
Гибкие лучи в Simscape Multibody приняты, чтобы быть сделанными из гомогенного, изотропного, и линейно эластичного материала. Можно задать свойства материала, такие как плотность и модуль Янга в разделе Stiffness and Inertia диалогового окна блока. Перекрестные частные свойства луча, такие как осевые, изгибные, и жесткости при кручении, автоматически вычисляются блоком с помощью материала и свойств геометрии, которые вы задаете. Видеть вычисленные значения, в диалоговом окне блока луча, открытый Stiffness and Inertia> Derived Values и нажимать кнопку Update.
Блоки луча поддерживают два метода затухания: универсальное модальное затухание и пропорциональное затухание. Универсальный модальный метод затухания применяет идентичные коэффициенты затухания ко всем режимам вибрации луча. В пропорциональном методе затухания ослабляющая матрица [C] является линейной комбинацией большой матрицы [M] и матрица жесткости [K]:
,
где α и β являются скалярными коэффициентами.
Параметр Number of Elements в разделе Discretization диалогового окна блока луча указывает, что количество конечных элементов раньше дискретизировало луч. Можно выбрать его значение, чтобы получить хороший компромисс между точностью симуляции, которая может потребовать большего количества элементов и скорости симуляции, которая требует меньшего количества элементов. Наименьшее количество использования элементов должно было удовлетворить вашим требованиям точности.
Для изгиба деформаций блоки луча используют кубический метод интерполяции Эрмита вычислить распределения смещения в каждом элементе. Распределения осевого смещения и крутильное вращение получены методом линейной интерполяции.
При использовании блоков луча в модели несколько факторов влияют на точность и скорость эффективности симуляции. В этом разделе рассматриваются удар этих трех наиболее важных факторов: гибкое использование луча, выбор решателя и настройки затухания.
Даже при том, что использование гибких лучей может увеличить точность симуляции мультитела, гибкие лучи имеют тенденцию замедлять его путем увеличения числовой жесткости и количества степеней свободы системы. Чтобы ускорить симуляцию, необходимо использовать твердое тело каждый раз, когда деформация тела незначительна. Кроме того, параметр Number of Elements в разделе Discretization в большой степени влияет на эффективность симуляции. Для получения дополнительной информации смотрите раздел Discretization.
Решатель очень важен для эффективности симуляции мультитела. Жесткие решатели, такие как ode15s, ode23t, или daessc, имеют тенденцию работать лучше на системы с гибкими лучами из-за жесткой природы этих систем. Кроме того, допуски решателя и максимальный порядок также влияют на точность и скорость симуляции. Для получения дополнительной информации смотрите, Выбирают Solver.
Примечание
Все решатели, кроме ode23t, обеспечивают некоторый уровень числового рассеяния, которое может быть полезным для моделирования гибких систем мультитела.
При моделировании гибкого луча с минимальным затуханием нежелательные высокочастотные режимы в ответе могут замедлить симуляцию, если решатель уже не обеспечивает соответствующее числовое рассеяние. В этом случае добавление небольшого количества затухания может улучшить скорость симуляции, значительно не влияя на точность модели.
Гибкие лучи в Simscape Multibody отвечают на силу тяжести, но только это задало в блоке Mechanism Configuration. Сила из-за блока Gravitational Field проигнорирована. Если, системой координат которого гибкий блок луча является частью, содержит блок Gravitational Field, тело ведет себя как будто в невесомости. Используя гибкое тело и блоки Gravitational Field в той же системе координат заставляет Diagnostic Viewer выдавать предупреждение компиляции.
Примечание
Моделирование силы тяжести и с Mechanism Configuration и с Gravitational Field блокирует результаты в ошибке компиляции.
Диалоговое окно каждого гибкого блока луча содержит разборную панель визуализации. Эта панель обеспечивает мгновенную визуальную обратную связь на луче, который вы моделируете. Используйте его, чтобы найти и устранить любые проблемы с поперечным сечением, длиной и цветом луча. Можно исследовать луч от различных взглядов путем выбора стандартного представления или путем вращения, панорамируя, и изменения масштаба.
В панели инструментов панели визуализации нажмите кнопку Update Visualization![]() , чтобы просмотреть последние изменения в луче. Нажмите Apply или OK, чтобы передать любые изменения в модели.
, чтобы просмотреть последние изменения в луче. Нажмите Apply или OK, чтобы передать любые изменения в модели.
Примечание
Можно указать на любую кнопку, чтобы видеть ее функцию.
Кроме того, можно щелкнуть правой кнопкой по панели визуализации для контекстно-зависимого меню. Это меню предоставляет дополнительные возможности изменять цвет фона, изменять установку вида представления и разделять панель визуализации в несколько окон, которые отображают другие взгляды на луч.
