Бесщеточный двигатель постоянного тока с тремя обмотками с трапециевидным распределением потока
Simscape / Электрический / Электромеханический / Постоянный магнит
Блок BLDC моделирует постоянный магнит синхронная машина с трехфазным статором раны Уая. Блок имеет четыре опции для определения распределения потока постоянного магнита в зависимости от угла ротора. Две опции допускают простую параметризацию путем принятия совершенного трапецоида для коэффициента противо-ЭДС. Для простой параметризации вы задаете или потокосцепление или вызванный ротором коэффициент противо-ЭДС. Другие две опции дают более точные результаты с помощью табличных данных, которые вы задаете. Для более точных результатов вы задаете или частную производную потокосцепления или измеренный коэффициент противо-ЭДС, постоянную для данной скорости ротора.
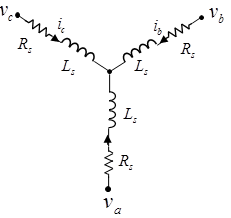
Рисунок показывает эквивалентную электрическую схему для обмоток статора.
Этот рисунок показывает моторную конструкцию с однополюсно-парным на роторе.
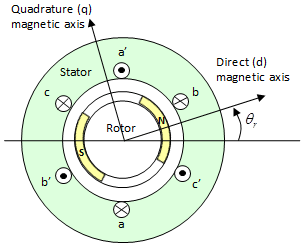
Для соглашения осей на предыдущем рисунке a - выравниваются фаза и потоки постоянного магнита, когда угол ротора θr является нулем. Блок поддерживает второе определение оси ротора. Для второго определения угол ротора является углом между a - фазой магнитная ось и ротором q - ось.
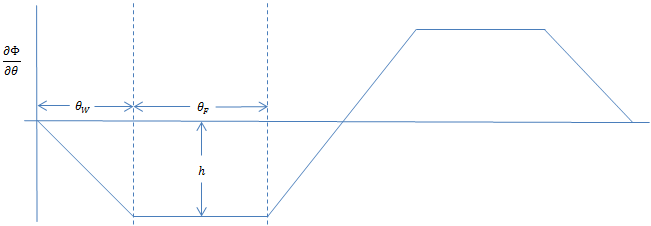
Магнитное поле ротора из-за постоянных магнитов создает трапециевидную скорость изменения потока с углом ротора. Рисунок показывает эту скорость изменения потока.
Коэффициент противо-ЭДС является скоростью изменения потока, заданного
где:
Φ является потокосцеплением постоянного магнита.
θ является углом ротора.
ω является скоростью вращательного механического устройства.
Высота h из трапециевидной скорости изменения потока профиль выведен из потока пика постоянного магнита.
Интеграция в области значений 0 к π/2,
где:
Φmax является потокосцеплением постоянного магнита.
h является скоростью изменения высоты профиля потока.
θF является углом ротора, передвигаются, по которому, коэффициент противо-ЭДС что поток постоянного магнита вызывает в статоре, является постоянным.
θW является углом ротора, передвигаются, по которым увеличениям коэффициента противо-ЭДС или уменьшается линейно, когда ротор перемещается в постоянную скорость.
Реорганизация предыдущего уравнения,
Напряжения через обмотки статора заданы
где:
va, vb и vc являются внешними напряжениями, применился к трем моторным электрическим соединениям.
Rs является эквивалентным сопротивлением каждой обмотки статора.
ia, ib и ic являются токами, текущими в обмотках статора.
и
скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и эти три обмотки способствуют общему потоку, соединяющему каждую обмотку. Общий поток задан
где:
ψa, ψb и ψc являются общими потоками, соединяющими каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba, и т.д. является взаимной индуктивностью обмоток статора.
ψam, ψbm и ψcm являются потоками постоянного магнита, соединяющими обмотки статора.
Индуктивность в обмотках статора является функциями угла ротора, заданного
и
где:
Ls является самоиндукцией статора на фазу — средняя самоиндукция каждой из обмоток статора.
Lm является колебанием индуктивности статора — колебание самоиндукции и взаимной индуктивности с изменяющимся углом ротора.
Ms является статором взаимная индуктивность — средняя взаимная индуктивность между обмотками статора.
Поток постоянного магнита, соединяющий каждую обмотку статора, следует за трапециевидным показанным на рисунке профилем. Блок реализует трапециевидный профиль с помощью интерполяционных таблиц, чтобы вычислить значения потока постоянного магнита.
Напряжение определения и уравнения крутящего момента для блока
и
где:
vd, vq и v0 является d - ось, q - ось и напряжения нулевой последовательности.
P является Преобразованием Парка, заданным
N является количеством пар полюса постоянного магнита ротора.
ω является скоростью вращательного механического устройства ротора.
и
частные производные мгновенного потока постоянного магнита, соединяющего каждую обмотку фазы.
id, iq и i0 является d - ось, q - ось и токи нулевой последовательности, заданные
Ld = Ls + Ms + 3/2 Lm. Ld является статором d - составляющая индукции.
Lq = Ls + Ms − 3/2 Lm. Lq является статором q - составляющая индукции.
L0 = Ls – 2Ms. L0 является индуктивностью нулевой последовательности статора.
T является крутящим моментом ротора. Крутящий момент течет из моторного случая (блокируйте физический порт C) к моторному ротору (блокируют физический порт R).
Потери в железе разделены на два условия, одно представление основного пути к намагничиванию и другое представление перекрестного зубного пути к совету, который становится активным во время ослабленной операции поля. Модель потерь в железе, которая основана на работе Меллора [3].
Термин, представляющий основной путь к намагничиванию, зависит от вызванного напряжения статора RMS, :
Это - доминирующий термин в течение операции без загрузок. k является коэффициентом противо-ЭДС, постоянной, связывающим вольты RMS на Гц. Это задано как , где f является электрической частотой. Первый срок на правой стороне является магнитной гистерезисной потерей, второй является потеря токов Фуко, и третьей является избыточная потеря. Эти три коэффициента, появляющиеся на числителях, выведены из значений, что вы предусматриваете гистерезис разомкнутой цепи, вихрь и избыточные потери.
Термин, представляющий перекрестный зубной путь к совету, становится важным, когда поле размагничивания создано и может быть определено из теста короткой схемы анализа конечных элементов. Это зависит от эдс RMS, сопоставленной с перекрестным зубным потоком совета, :
Три условия числителя выведены из значений, вы предусматриваете гистерезис короткой схемы, вихрь и избыточные потери.
Блок имеет четыре дополнительных тепловых порта, один для каждой из этих трех обмоток и один для ротора. Эти порты скрыты по умолчанию. Чтобы осушить тепловые порты, щелкните правой кнопкой по блоку по своей модели, выберите Simscape> Block choices, и затем выберите желаемый вариант блока с тепловыми портами: Composite three-phase ports | Show thermal port или Expanded three-phase ports | Show thermal port. Это действие отображает тепловые порты на значке блока и отсоединяет параметры Thermal Port и Temperature Dependence. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловые порты, чтобы симулировать эффекты медного сопротивления и потерь в железе, которые преобразовывают электроэнергию в теплоту. Для получения дополнительной информации об использовании тепловых портов в блоках привода смотрите Термальные эффекты Симуляции во Вращательных и Поступательных Приводах.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, пополудни анализ неработающих энергосистем. Хобокен, NJ: нажатие Wiley-IEEE, 1995.
[3] Меллор, P.H., Р. Робель и Д. Холидей. “В вычислительном отношении эффективная модель потери в железе для бесщеточных машин AC, которая обслуживает расчетный поток и поле, ослабила операцию”. IEEE Электрическая Конференция по Машинам и Дискам. Май 2009.


