Постоянный магнит синхронный двигатель с синусоидальным распределением потока
Simscape / Электрический / Электромеханический / Постоянный магнит
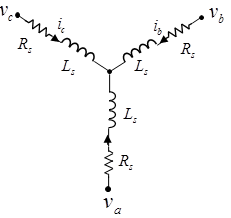
Блок PMSM моделирует постоянный магнит синхронный двигатель с трехфазным статором раны Уая. Рисунок показывает эквивалентную электрическую схему для обмоток статора.
Можно выбрать различную встроенную параметризацию для этого блока. Для получения дополнительной информации смотрите раздел Predefined Parameterization.
Этот рисунок показывает моторную конструкцию с однополюсно-парным на роторе.
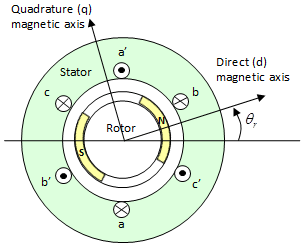
Постоянные магниты генерируют магнитное поле ротора, которое создает синусоидальную скорость изменения потока с углом ротора.
Для соглашения осей на предыдущем рисунке a - выравниваются фаза и потоки постоянного магнита, когда угол механического устройства ротора, θr, является нулем. Блок поддерживает второе определение оси ротора, в котором угол механического устройства ротора задан как угол между a - фазой магнитная ось и ротором q - ось.
Напряжения через обмотки статора заданы:
где:
va, vb и vc являются отдельными напряжениями фазы через обмотки статора.
Rs является эквивалентным сопротивлением каждой обмотки статора.
ia, ib и ic являются токами, текущими в обмотках статора.
и скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и эти три обмотки способствуют общему потоку, соединяющему каждую обмотку. Общий поток задан:
где:
ψa, ψb и ψc являются общими потоками, соединяющими каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba, и так далее, является взаимной индуктивностью обмоток статора.
ψam, ψbm и ψcm являются потоками постоянного магнита, соединяющими обмотки статора.
Индуктивность в обмотках статора является функциями ротора электрический угол, заданный:
и
где:
θr является углом механического устройства ротора.
θe является ротором электрический угол.
rotor offset является 0 если вы задаете ротор электрический угол относительно d-оси или -pi/2 если вы задаете ротор электрический угол относительно q-оси.
Ls является самоиндукцией статора на фазу. Это значение является средней самоиндукцией каждой из обмоток статора.
Lm является колебанием индуктивности статора. Это значение является колебанием самоиндукции и взаимной индуктивности с изменяющимся углом ротора.
Ms является статором взаимная индуктивность. Это значение является средней взаимной индуктивностью между обмотками статора.
Поток постоянного магнита, соединяющий извилистый a, является максимумом когда θe = 0 ° и нуль когда θe = 90 °. Поэтому соединенный моторный поток задан:
где ψm является потокосцеплением постоянного магнита.
Применение преобразования Парка с блоком, электрические уравнения производят выражение для крутящего момента, который независим от угла ротора.
Преобразование парка задано:
где θe является электрическим углом, заданным как Nθr. N является количеством пар полюса.
Используя преобразование Парка на статоре извилистые напряжения и токи преобразовывают их к системе координат dq0, которая независима от угла ротора:
и
Применение преобразования Парка к первым двум электрическим уравнениям производит следующие уравнения, которые задают поведение блока:
и
где:
Ld = Ls + Ms + 3/2 Lm. Ld является статором d - составляющая индукции.
Lq = Ls + Ms − 3/2 Lm. Lq является статором q - составляющая индукции.
L0 = Ls – 2Ms. L0 является индуктивностью нулевой последовательности статора.
ω является скоростью вращательного механического устройства ротора.
N является количеством пар полюса постоянного магнита ротора.
T является крутящим моментом ротора. Крутящий момент течет из моторного случая (блокируйте физический порт C) к моторному ротору (блокируют физический порт R).
Использование блока PMSM исходная, неортогональная реализация Парка преобразовывает. При попытке применить альтернативную реализацию, вы получаете различные результаты для dq0 напряжения и токов.
Можно параметрировать двигатель с помощью коэффициента противо-ЭДС или закрутить константы, которые чаще всего даются в моторных таблицах данных при помощи опции Permanent magnet flux linkage.
Коэффициент противо-ЭДС, постоянная задан как пиковое напряжение, вызванное постоянным магнитом в каждой из фаз на модульную скорость вращения. Это связано с пиковым потокосцеплением постоянного магнита:
Из этого определения, из этого следует, что коэффициентом противо-ЭДС eph для одной фазы дают:
Постоянный крутящий момент задан как пиковый крутящий момент, вызванный каждой из фаз на текущий модуль. Это численно идентично в значении коэффициенту противо-ЭДС, постоянной, когда оба описываются в единицах СИ:
Когда Ld =Lq, и когда токи во всех трех фазах сбалансированы, из этого следует, что объединенным крутящим моментом T дают:
где Ipk является максимальным током в любой из этих трех обмоток.
Фактор 3/2 следует из этого являющегося установившейся суммой крутящих моментов от всех фаз. Поэтому крутящий момент постоянный kt мог также быть задан как:
где T является измеренным общим крутящим моментом при тестировании со сбалансированным трехфазным током с пиковым линейным напряжением Ipk. Запись в терминах текущей линии RMS:
Потери в железе разделены на два условия, одно представление основного пути к намагничиванию и другое представление перекрестного зубного пути к совету, который становится активным во время ослабленной операции поля. Модель потерь в железе, которая основана на работе Меллора [3].
Термин, представляющий основной путь к намагничиванию, зависит от вызванного напряжения статора линии-к-нейтральному RMS, :
Это - доминирующий термин в течение операции без загрузок. k является коэффициентом противо-ЭДС, постоянной, связывающим вольты RMS на Гц. Это задано как , где f является электрической частотой. Первый срок на правой стороне является магнитной гистерезисной потерей, второй является потеря токов Фуко, и третьей является избыточная потеря. Эти три коэффициента, появляющиеся на числителях, выведены из значений, что вы предусматриваете гистерезис разомкнутой цепи, вихрь и избыточные потери.
Термин, представляющий перекрестный зубной путь к совету, становится важным, когда поле размагничивания создано и может быть определено из теста короткой схемы анализа конечных элементов. Это зависит от эдс RMS, сопоставленной с перекрестным зубным потоком совета, :
Три условия числителя выведены из значений, вы предусматриваете гистерезис короткой схемы, вихрь и избыточные потери.
Существует несколько доступной встроенной параметризации для блока PMSM.
Эти данные перед параметризацией позволяют вам настраивать блок, чтобы представлять компоненты определенными поставщиками. Параметризация их постоянный магнит синхронные двигатели совпадает с таблицами данных производителя. Чтобы загрузить предопределенную параметризацию, нажмите на гиперссылку Select a predefined parameterization в маске блока PMSM и выберите часть, которую вы хотите использовать из списка доступных компонентов.
Примечание
Предопределенная параметризация компонентов Simscape использует доступные источники данных для предоставления значений параметров. Техническое решение и упрощение предположений используются, чтобы заполнить для недостающих данных. В результате отклонения между симулированным и фактическим физическим поведением должны ожидаться. Чтобы гарантировать необходимую точность, необходимо подтвердить симулированное поведение против экспериментальных данных и совершенствовать модели компонента по мере необходимости.
Блок имеет четыре дополнительных тепловых порта, один для каждой из этих трех обмоток и один для ротора. Эти порты скрыты по умолчанию. Чтобы осушить тепловые порты, щелкните правой кнопкой по блоку по своей модели, выберите Simscape> Block choices, и затем выберите желаемый вариант блока с тепловыми портами: Composite three-phase ports | Show thermal port или Expanded three-phase ports | Show thermal port. Это действие отображает тепловые порты на значке блока и отсоединяет параметры Thermal Port и Temperature Dependence. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловые порты, чтобы симулировать эффекты медного сопротивления и потерь в железе, которые преобразовывают электроэнергию в теплоту. Для получения дополнительной информации об использовании тепловых портов в блоках привода смотрите Термальные эффекты Симуляции во Вращательных и Поступательных Приводах.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, пополудни анализ неработающих энергосистем. Хобокен, NJ: нажатие Wiley-IEEE, 1995.
[3] Меллор, P.H., Р. Робель и Д. Холидей. “В вычислительном отношении эффективная модель потери в железе для бесщеточных машин AC, которая обслуживает расчетный поток и поле, ослабила операцию”. IEEE Электрическая Конференция по Машинам и Дискам. Май 2009.




