Модель двигателя постоянного тока с электрическим и характеристиками крутящего момента и моделированием отказа
Simscape / Электрический / Электромеханический / Нарисованные кистью Двигатели
Блок DC Motor представляет электрические характеристики и характеристики крутящего момента двигателя постоянного тока с помощью следующей модели эквивалентной схемы:
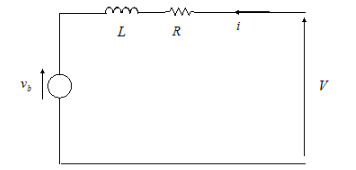
Вы задаете параметры эквивалентной схемы для этой модели, когда вы устанавливаете параметр Model parameterization на By equivalent circuit parameters. Резистор R соответствует сопротивлению, которое вы задаете в параметре Armature resistance. Индуктор L соответствует индуктивности, которую вы задаете в параметре Armature inductance.
Можно задать, как сгенерировать магнитное поле двигателя постоянного тока путем установки параметра Field type на желаемую опцию. Постоянные магниты в двигателе вызывают следующий коэффициент противо-ЭДС vb в арматуре:
где kv является Back-emf constant, и ω является скоростью вращения. Двигатель производит следующий крутящий момент, который пропорционален моторному текущему i:
где kt является Torque constant. Блок DC Motor принимает, что нет никаких электромагнитных потерь. Это означает, что механическая энергия равна электроэнергии, рассеянной коэффициентом противо-ЭДС в арматуре. Приравнивание этих двух условий дает:
В результате вы задаете или kv или kt в параметрах блоков.
Если магнитное поле сгенерировано от токов, текущие через обмотки, Back-emf constant зависит от поля текущий If:
где Laf является Field-armature mutual inductance.
Характеристика скорости крутящего момента для блока DC Motor связана с параметрами на предыдущем рисунке. Когда вы устанавливаете параметр Model parameterization на By stall torque & no-load speed или By rated power, rated speed & no-load speed, блок решает для параметров эквивалентной схемы можно следующим образом:
Для установившегося отношения скорости крутящего момента L не оказывает влияния.
Суммируйте напряжения вокруг цикла и перестроения для i:
Замените этим значением i в уравнение для крутящего момента:
Когда вы устанавливаете параметр Model parameterization на By stall torque & no-load speed, блок использует предыдущее уравнение, чтобы определить значения для R и kt (и эквивалентно kv).
Когда вы устанавливаете параметр Model parameterization на By rated power, rated speed & no-load speed, блок использует расчетную скорость и степень вычислить расчетный крутящий момент. Блок использует расчетный крутящий момент и значения скорости без загрузок в предыдущем уравнении, чтобы определить значения для R и kt.
Инерция двигателя моделей блока J и затухание λ для всех значений параметра Model parameterization. Получившийся крутящий момент через блок:
Не всегда возможно измерить затухание ротора, и затухание ротора не всегда обеспечивается в таблице данных производителя. Альтернатива должна использовать ток без загрузок, чтобы вывести значение для затухания ротора.
Для без загрузок электрически сгенерированный механический крутящий момент должен равняться крутящему моменту затухания ротора:
где i noload является током без загрузок. Если вы выбираете By no-load current для параметра Rotor damping parameterization затем это уравнение используется в дополнение к уравнению скорости крутящего момента, чтобы определить значения для λ и других коэффициентов уравнения.
Значение для затухания ротора, ли заданный непосредственно или в терминах тока без загрузок, учтено при определении параметров эквивалентной схемы для опций Model parameterization By stall torque and no-load speed и By rated power, rated speed and no-load speed.
Когда положительные электрические токи от электрического + до портов -, положительный крутящий момент действует от механического C до портов R.
Блок DC Motor позволяет вам моделировать два типа отказов:
Отказ обмотки арматуры — обмотка арматуры перестала работать и идет разомкнутая цепь.
Отказ обмотки возбуждения — обмотка возбуждения, которая создает сбои магнитного поля и идет разомкнутая цепь.
Блок может инициировать события отказа:
В определенное время (временный отказ).
Когда текущий предел превышен для дольше, чем определенный временной интервал (поведенческий отказ).
Можно включить или отключить эти триггерные механизмы отдельно.
Можно выбрать, выпустить ли утверждение, когда отказ происходит, при помощи параметра Reporting when a fault occurs. Утверждение может принять форму предупреждения или ошибки. По умолчанию блок не выпускает утверждение.
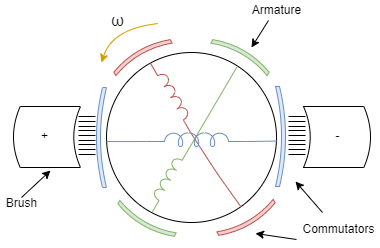
Этот рисунок показывает типовое представление двигателя постоянного тока, с кистями, арматурами, коммутаторами и их обмотками:
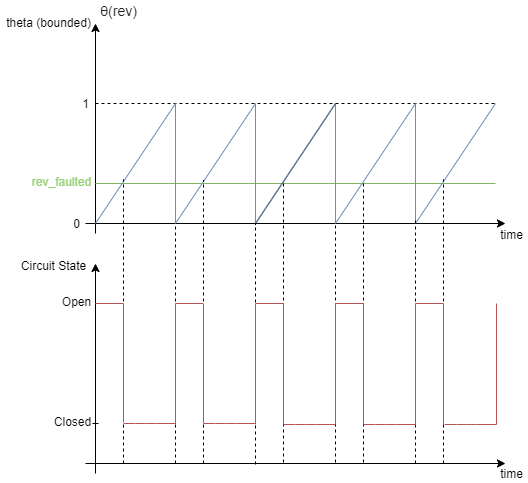
Если вы устанавливаете параметр Enable armature winding open-circuit fault на Yes, сбои арматуры, в то время, когда задано параметром Time at which armature winding fault is triggered для временного отказа, или когда извилистые токи превышает значение параметра Maximum permissible armature winding current для поведенческого отказа. Когда арматура перестала работать, источник напряжения, соединенный с этим блоком, наблюдает разомкнутую цепь для части общего моторного оборота, заданного параметром Fraction of revolution during which armature is open-circuit, rev_faulted. Этот рисунок иллюстрирует поведение состояния схемы для определенного rev_faulted в целый период оборота:
Блок имеет дополнительный тепловой порт, скрытый по умолчанию. Чтобы осушить тепловой порт, щелкните правой кнопкой по блоку по своей модели, и затем из контекстного меню выбирают Simscape> Block choices> Show thermal port. Это действие отображает тепловой порт H на значке блока и отсоединяет параметры Thermal Port и Temperature Dependence.
Используйте тепловой порт, чтобы симулировать эффекты медных потерь сопротивления, которые преобразовывают электроэнергию в теплоту. Для получения дополнительной информации об использовании тепловых портов и на Temperature Dependence и параметрах Thermal Port, смотрите Термальные эффекты Симуляции во Вращательных и Поступательных Приводах.
[1] Болтон, W. Механотроника: Системы Электронного управления в Машиностроении и Электротехнике, 3-м выпуске Образование Пирсона, 2004..
Induction Machine (Single-Phase) | Motor & Drive (System Level) | Shunt Motor | Universal Motor




