Асинхронный двигатель с фазным ротором с параметризацией в единицах СИ или относительных
Simscape / Электрический / Электромеханический / Асинхронный
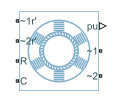
Блок Induction Machine Wound Rotor моделирует ротор раны асинхронная машина основными параметрами, описанными в относительных единицах или в Международной системе единиц (СИ). Ротор раны асинхронная машина является типом асинхронной машины. Весь статор и связи ротора доступны на блоке. Поэтому можно смоделировать режимы мягкого запуска с помощью переключателя между настройками Уая и дельты или путем увеличения сопротивления ротора. Если вам не нужен доступ к обмоткам ротора, используйте блок Induction Machine Squirrel Cage вместо этого.
Порт Connect ~1 к трехфазной схеме. Чтобы соединить статор в настройке дельты, соедините блок Phase Permute между портами ~1 и ~2. Соединять статор в настройке Уая, порт connect ~2 к Grounded Neutral или блоку Floating Neutral. Если вы не должны варьироваться сопротивление ротора, соединить порт ~1r' ротора с блоком Floating Neutral и порт ~2r' ротора с блоком Grounded Neutral.
Схема ротора отнесена в статор. Поэтому, когда вы используете блок в схеме, отошлите любые дополнительные параметры схемы к статору.
Если блок находится в сети, которая совместима с разовым частотой режимом симуляции, можно выполнить анализ потоков загрузки сети. Анализ потоков загрузки вводит установившиеся значения, которые можно использовать, чтобы инициализировать машину.
Для получения дополнительной информации смотрите, Выполняют Анализ потоков загрузки Используя Simscape Electrical и Режим Симуляции Частоты и Времени. Для примера, который показывает, как инициализируют асинхронную машину с помощью данных из анализа потоков загрузки, смотрите Инициализацию Асинхронного двигателя с Loadflow.
Для реализации SI блок преобразует значения SI, в которые вы входите на стоимости единицы для симуляции. Конвертированные значения основаны на машине, соединяемой в проветривающей дельту настройке.
Для реализации на модуль необходимо задать сопротивления и индуктивность во вкладке импедансов на основе машины, соединяемой в проветривающей дельту настройке.
Для получения информации об отношении между SI и параметрами машины на модуль, смотрите Преобразование На модуль для Параметров Машины. Для получения информации о параметризации на модуль смотрите систему в относительных единицах Модулей.
Асинхронные уравнения машины описываются относительно синхронной системы координат, заданной
где frated является значением параметра Rated electrical frequency.
Преобразование Парка сопоставляет уравнения статора с системой координат, которая является стационарной относительно расчетной электрической частоты. Преобразование Парка задано
где θe является электрическим углом.
Уравнения ротора сопоставлены с другой системой координат, заданной различием между электрическим углом и продуктом угла ротора θr и количество пар полюса N:
Преобразование Парка используется, чтобы определить асинхронные уравнения машины на модуль. Уравнения напряжения статора определены
и
где:
vds, vqs и v0s является d - ось, q - ось и напряжения статора нулевой последовательности, заданные
va, vb и vc являются напряжениями статора через порты ~1 и ~2.
ωbase является основной электрической скоростью на модуль.
ψds, ψqs и ψ0s является d - ось, q - ось и потокосцепления статора нулевой последовательности.
Rs является сопротивлением статора.
ids, iqs и i0s является d - ось, q - ось и токи статора нулевой последовательности, заданные
ia, ib и ic являются токами статора, текущими из порта ~1 к порту ~2.
Уравнения напряжения ротора определены
и
где:
vdr, vqr и v0r является d - ось, q - ось и напряжения ротора нулевой последовательности, заданные
var, vbr и vcr являются напряжениями ротора через порты ~1r' и ~2r'.
ψdr, ψqr и ψ0r является d - ось, q - ось и потокосцепления ротора нулевой последовательности.
ω является синхронной скоростью на модуль. Для синхронной системы координат значение равняется 1.
ωr является скоростью вращательного механического устройства на модуль.
Rrd является сопротивлением ротора, упомянул статор.
idr, iqr и i0r является d - ось, q - ось и токи ротора нулевой последовательности, заданные
iar, ibr и icr являются токами ротора, текущими из порта ~1r' к порту ~2r'.
Уравнения потокосцепления статора определены
и
где Lss является самоиндукцией статора, и Lm является индуктивностью намагничивания.
Уравнения потокосцепления ротора определены
и
то, где Lrrd является самоиндукцией ротора, упомянуло статор.
Крутящий момент ротора задан
Самоиндукция статора Lss, индуктивность утечки статора Lls и индуктивность намагничивания Lm связана
Самоиндукция ротора Lrrd, индуктивность утечки ротора Llrd и индуктивность намагничивания Lm связана
Когда кривая насыщения обеспечивается, уравнения, чтобы решить, что влажная индуктивность намагничивания в зависимости от намагничивания потока:
Ни для какого насыщения уравнение уменьшает до
Можно выполнить графический вывод и отобразить действия с помощью меню Electrical в контекстном меню блока.
Щелкните правой кнопкой по блоку и, в меню Electrical, выберите опцию:
Display Base Values — Отображает значения машины в относительных единицах в Командном окне MATLAB®.
Plot Torque Speed (SI) — Зависимость момента от скорости графиков, оба измеренные в единицах СИ, в графическом окне MATLAB с помощью текущих параметров машины.
Plot Torque Speed (pu) — Зависимость момента от скорости графиков, оба измерились в относительных единицах в графическом окне MATLAB с помощью текущих параметров машины.
Plot Open-Circuit Saturation — Напряжение терминала графиков по сравнению с текущей линией без загрузок, оба в относительных единицах, в графическом окне MATLAB. График содержит три трассировки:
Ненасыщенный — (ненасыщенная) индуктивность намагничивания Статора.
Насыщаемый — интерполяционная таблица Разомкнутой цепи (v по сравнению с i) вы задаете.
Выведенный — интерполяционная таблица Разомкнутой цепи вывела из интерполяционной таблицы разомкнутой цепи на модуль (v по сравнению с i), вы задаете. Эти данные используются, чтобы вычислить влажную индуктивность намагничивания, Lm_sat, и фактор насыщения, Ks, по сравнению с магнитным потокосцеплением, ψm, характеристиками.
Plot Saturation Factor — Фактор насыщения графиков, Ks, по сравнению с магнитным потокосцеплением, ψm, в графическом окне MATLAB с помощью параметров машины. Этот параметр выведен из других параметров, которые вы задаете:
Линия без загрузок текущие данные о насыщении, i
Терминальные данные о насыщении напряжения, v
Индуктивность утечки, Lls
Plot Saturated Inductance — Графики, намагничивающие индуктивность, Lm_sat, по сравнению с магнитным потокосцеплением, ψm, в графическом окне MATLAB с помощью параметров машины. Этот параметр выведен из других параметров, которые вы задаете:
Линия без загрузок текущие данные о насыщении, i
Терминальные данные о насыщении напряжения, v
Индуктивность утечки, Lls
Для реализации SI v находится в V (RMS фазы фазы), и i находится в (RMS).
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках.
Тип переменных, которые отображаются в настройках Variables, зависит от метода инициализации, который вы выбираете, в настройках Main, для параметра Initialization option. Задавать использование целевых значений:
Переменные потока — Установленный параметр Initialization option на Set targets for flux variables.
Данные из анализа потоков загрузки — Установленный параметр Initialization option на Set targets for load flow variables.
Если вы выбираете Set targets for load flow variables, чтобы полностью задать начальное условие, необходимо включать ограничение инициализации в форме высокоприоритетного целевого значения. Например, если ваша асинхронная машина соединяется с блоком Inertia, начальное условие для асинхронной машины полностью задано, если в настройках Variables блока Inertia Priority для Rotational velocity установлен в High. В качестве альтернативы вы могли установить Priority на None для блока Inertia Rotational velocity, и вместо этого набор Priority для блока Slip асинхронной машины, Real power generated или Mechanical power consumed к High.
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Лышевский, S. E. Электромеханические системы, электрические машины и прикладная механотроника. Бока-Ратон, FL: нажатие CRC, 1999.
[3] Ojo, J. O. Consoli, A. и Lipo, T. A. "Улучшенная модель влажных асинхронных машин", Транзакции IEEE на Промышленных Приложениях. Издание 26, № 2, стр 212-221, 1990.

