Эта тема вводит, как использовать три различных объекта траектории смоделировать траектории платформы, и как выбрать между ними.
Radar Toolbox™ обеспечивает три Системных объекта, которые можно использовать для траекторий модели платформ включая наземные транспортные средства, поставки, самолет и космический корабль. Можно выбрать между этими объектами траектории на основе доступной информации о траектории и промежутка расстояния траектории.
waypointTrajectory (Sensor Fusion and Tracking Toolbox) — Задает траекторию с помощью нескольких waypoints в Декартовых координатах, через которые должна пройти траектория. Траектория принимает, что система координат является фиксированным Северо-востоком вниз (NED) или системой координат "восточного севера" (ENU). Поскольку интерполяция траектории принимает, что гравитационное ускорение, описанное в системе координат траектории, является постоянным, waypointTrajectory обычно используется для траектории, заданной в области, которая охватывает только десятки или сотни километров.
geoTrajectory (Sensor Fusion and Tracking Toolbox) — Задает траекторию с помощью нескольких waypoints в геодезических координатах (широта, долгота и высота), через который должна пройти траектория. Поскольку waypoints описываются в геодезических координатах, geoTrajectory обычно используется для траектории от сотен до тысяч километров промежутка расстояния.
kinematicTrajectory (Sensor Fusion and Tracking Toolbox) — Задает траекторию с помощью кинематических свойств, таких как ускорение и угловое ускорение, описанное в системе координат тела платформы. Можно использовать kinematicTrajectory чтобы сгенерировать траекторию любого промежутка расстояния пока, кинематическая информация траектории доступна. Объект принимает систему координат Декартовой координаты.
Два находящихся в waypoint объекта траектории (waypointTrajectory и geoTrajectory) может автоматически вычислить линейную информацию о скорости платформы, но можно также явным образом задать линейную скорость с помощью Velocity свойство или комбинация Course, GroundSpeed, и ClimbRate свойства.
Траектория платформы состоит из вращательного движения и поступательного движения. По умолчанию, два находящихся в waypoint объекта траектории (waypointTrajectory и geoTrajectory) автоматически сгенерируйте ориентацию платформы в каждом waypoint путем выравнивания угла рыскания с путем траектории, но можно явным образом задать ориентацию с помощью Orientation свойство. Альтернативно, можно использовать AutoPitch и AutoBank свойства включить автоматические углы продольного и поперечного крена, соответственно. Для kinematicTrajectory, необходимо использовать Orientation свойство и вход скорости вращения, чтобы задать вращательное движение траектории.
waypointTrajectorywaypointTrajectory Системный объект задает траекторию, которая гладко проходит через waypoints, описанный в Декартовых координатах. Обычно можно использовать waypointTrajectory к транспортным средствам модели, перемещающимся в сотнях километров. Эти транспортные средства включают автомобили, появляются морское ремесло и коммерческий самолет (вертолеты, плоскости и quadcopters). Можно выбрать систему координат в качестве фиксированного ENU или системы координат NED с помощью ReferenceFrame свойство. Для получения дополнительной информации о том, как объект генерирует траекторию, смотрите раздел Algorithms (Sensor Fusion and Tracking Toolbox) waypointTrajectory.
waypointTrajectory Пример для приземления самолетаЗадайте траекторию приземляющегося самолета с помощью waypointTrajectory объект.
waypoints = [-421 -384 2000;
47 -294 1600;
1368 174 1300;
995 1037 900;
-285 293 600;
-1274 84 350;
-2328 101 150;
-3209 83 0];
timeOfArrival = [0; 16.71; 76.00; 121.8; 204.3; 280.31; 404.33; 624.6];
aircraftTraj = waypointTrajectory(waypoints,timeOfArrival);Создайте theaterPlot объект визуализировать траекторию и самолет.
minCoords = min(waypoints); maxCoords = max(waypoints); tp = theaterPlot('XLimits',1.2*[minCoords(1) maxCoords(1)], ... 'YLimits',1.2*[minCoords(2) maxCoords(2)], ... 'ZLimits',1.2*[minCoords(3) maxCoords(3)]); % Create a trajectory plotter and a platform plotter tPlotter = trajectoryPlotter(tp,'DisplayName','Trajectory'); pPlotter = platformPlotter(tp,'DisplayName','Aircraft');
Получите Декартов waypoints траектории с помощью lookupPose объектная функция.
sampleTimes = timeOfArrival(1):timeOfArrival(end);
numSteps = length(sampleTimes);
[positions,orientations] = lookupPose(aircraftTraj,sampleTimes);
plotTrajectory(tPlotter,{positions})
axis equalПостройте движение платформы с помощью объекта ячейки самолета.
mesh = scale(rotate(tracking.scenario.airplaneMesh,[0 0 180]),15); % Exaggerated scale for better visualization view(20.545,-20.6978) for i = 1:numSteps plotPlatform(pPlotter,positions(i,:),mesh,orientations(i)) % Uncomment the next line to slow the aircraft motion animation % pause(1e-7) end
В анимации угол рыскания самолета выравнивается с траекторией по умолчанию.
Создайте вторую траекторию самолета с тем же waypoints как первая траектория самолета, но установите ее AutoPitch и AutoBank свойства к true. Это генерирует траекторию, более представительную для возможных маневров самолета.
aircraftTraj2 = waypointTrajectory(waypoints,timeOfArrival, ... 'AutoPitch',true, ... 'AutoBank',true);
Постройте вторую траекторию и наблюдайте изменение в ориентации самолета.
[positions2,orientations2] = lookupPose(aircraftTraj2,sampleTimes); for i = 1:numSteps plotPlatform(pPlotter,positions2(i,:),mesh,orientations2(i)); % Uncomment the next line to slow the aircraft motion animation % pause(1e-7) end

Визуализируйте различия в ориентации между этими двумя траекториями в углах.
distance = dist(orientations2,orientations); figure plot(sampleTimes,distance*180/pi) xlabel('Time (sec)') ylabel('Angular Ditance (dge)') title('Orientation Difference Between Two Waypoint Trajectories')

geoTrajectorygeoTrajectory Системный объект генерирует траекторию с помощью waypoints подобным способом как waypointTrajectory объект, но это имеет два существенных различия в том, как задать скоростные входные параметры и waypoints.
При определении waypoints для geoTrajectory, опишите каждый waypoint в геодезических координатах широты, долготы и высоты выше модели эллипсоида WG84. Используя геодезические координаты, можно удобно задать траектории дальние, такие как траектория рейса самолета на реалистической модели Earth.
При определении ориентации и информации о скорости для каждого waypoint, система координат для ориентации и скорости является локальным NED или системой координат ENU, заданной под текущей траекторией waypoint. Например, показанная на рисунке система координат 1-E1-D1 N является локальной системой координат NED.
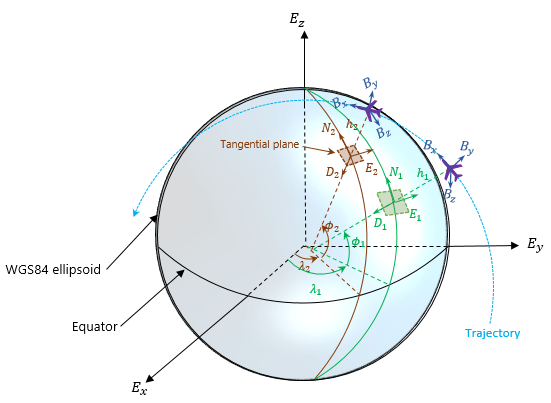
На рисунке,
x E, E y и E, z является тремя осями системы координат Сосредоточенного землей зафиксированного землей (ECEF), которая закрепляется на Земле.
(λ 1, ϕ 1, h 1), и (λ 2, ϕ 2, h 2) геодезические координаты плоскости в двух waypoints.
(N 1, E 1, D 1), и (N 2, E 2, D 2) две локальных системы координат NED, соответствующие двум траекториям waypoints.
x B, B y и B, z является тремя осями системы координат тела платформы, которая закрепляется на платформе.
Trajectory Пример для траектории рейса Загрузите полетные данные траектории рейса от Лос-Анджелеса до Бостона. Данные содержат информацию о рейсе включая время полета, геодезические координаты для каждого waypoint, курса и скорости относительно земли.
load flightData.matСоздайте geoTrajectory основанный на объектах на полетных данных.
planeTraj = geoTrajectory([latitudes longitudes heights],timeOfArrival, ... 'Course',courses,'GroundSpeed',speeds);
Ищите Декартовы координаты waypoints в системе координат ECEF.
sampleTimes = 0:1000:3600*10;
positionsCart = lookupPose(planeTraj,sampleTimes,'ECEF');Покажите траекторию с помощью helperGlobeView класс, который аппроксимирует Наземную сферу.
viewer = helperGlobeView;
plot3(positionsCart(:,1),positionsCart(:,2),positionsCart(:,3),'r')
Можно далее исследовать траекторию путем запроса других выходных параметров траектории.
kinematicTrajectoryВ отличие от двух waypoint объектов траектории, kinematicTrajectory Системный объект использует кинематические атрибуты, чтобы задать траекторию. Думайте о траектории как о численном интегрировании положения (положение и ориентация) и линейная скорость платформы, на основе линейного ускорения и угловой информации об ускорении. Положение и линейная скорость заданы с уважаемым выбранной, зафиксированной системе координат сценария, тогда как линейное ускорение и скорость вращения заданы с уважаемым системе координат тела платформы.
kinematicTrajectory Пример для пути UAVСоздайте kinematicTrajectory объект для симуляции пути UAV. Задайте отрезок времени траектории как 120 секунд.
traj = kinematicTrajectory('SampleRate',1, ... 'AngularVelocitySource','Property'); tStart = 0; tFinal = 120; tspan = tStart:tFinal; numSteps = length(tspan); positions = NaN(3,numSteps); velocities = NaN(3,numSteps); vel = NaN(1,numSteps);
Чтобы сформировать квадратный путь, покрывающий небольшую область, разделите траекторию UAV на шесть сегментов:
Взлетание и возрастание в z-направлении
Перемещение в положительное направление X
Перемещение в положительное направление Y
Перемещение в отрицательное направление X
Перемещение в отрицательное направление Y
Убывание в z-направлении и приземлении
В каждом сегменте UAV ускоряется в одном направлении и затем замедляется в том направлении с той же ускоряющей величиной. В результате в конце каждого сегмента, скорость UAV является нулем.
segSteps = floor(numSteps/12); accelerations = zeros(3,numSteps); acc = 1; % Acceleration for taking off and ascending in the z-direction accelerations(3,1:segSteps) = acc; accelerations(3,segSteps+1:2*segSteps) = -acc; % Acceleration for moving in the positive x-direction accelerations(1,2*segSteps+1:3*segSteps) = acc; accelerations(1,3*segSteps+1:4*segSteps) = -acc; % Acceleration for moving in the positive y-direction accelerations(2,4*segSteps+1:5*segSteps) = acc; accelerations(2,5*segSteps+1:6*segSteps) = -acc; % Acceleration for moving in the negative x-direction accelerations(1,6*segSteps+1:7*segSteps) = -acc; accelerations(1,7*segSteps+1:8*segSteps) = acc; % Acceleration for moving in the negative y-direction accelerations(2,8*segSteps+1:9*segSteps) = -acc; accelerations(2,9*segSteps+1:10*segSteps) = acc; % Descending in the z-direction and landing accelerations(3,10*segSteps+1:11*segSteps) =-acc; accelerations(3,11*segSteps+1:end) = acc;
Симулируйте траекторию путем вызова kinematicTrajectory объект с заданным ускорением.
for i = 1:numSteps [positions(:,i),~,velocities(:,i)] = traj(accelerations(:,i)'); vel(i) = norm(velocities(:,i)); end
Визуализируйте траекторию с помощью theaterPlot.
% Create a theaterPlot object and create plotters for the trajectory and the % UAV Platform. figure tp = theaterPlot('XLimits',[-30 130],'YLimits',[-30 130],'ZLimits',[-30 130]); tPlotter = trajectoryPlotter(tp,'DisplayName','UAV trajectory'); pPlotter = platformPlotter(tp,'DisplayName','UAV','MarkerFaceColor','g'); % Plot the trajectory. plotTrajectory(tPlotter,{positions'}) view(-43.18,56.49) % Use a cube to represent the UAV platform. dims = struct('Length',10, ... 'Width',5, ... 'Height',3, ... 'OriginOffset',[0 0 0]); % Animate the UAV platform position. for i = 1:numSteps plotPlatform(pPlotter,positions(:,i)',dims,eye(3)) pause(0.01) end

Покажите величину скорости платформы UAV.
figure plot(tspan,vel) xlabel('Time (s)') ylabel('Velocity (m/s)') title('Magnitude of the UAV Velocity')

kinematicTrajectory Пример для относящейся к космическому кораблю траекторииИспользуйте kinematicTrajetory задавать круговую относящуюся к космическому кораблю траекторию. Орбита имеет эти элементы:
Орбитальный радиус () — 7 000 км
Наклон () — 60 градусов
Аргумент возрастающего узла () — 90 градусов. Возрастающее направление узла выравнивается с - направление.
Истинная аномалия () — –90 градусов
На рисунке, -- система координат Сосредоточенного землей инерционного (ECI), которая имеет фиксированную позицию и ориентацию на пробеле. -- относящаяся к космическому кораблю система координат тела, закрепленная на космическом корабле. и исходное положение и скорость космического корабля.

Задавать круговую орбиту с помощью kinematicTrajectory, необходимо обеспечить исходное положение, начальную скорость и начальную ориентацию космического корабля относительно системы координат ECI. Для выбранной истинной аномалии (= –), относящаяся к космическому кораблю скорость выравнивается с - направление.
inclination = 60; % degrees mu = 3.986e14; % standard earth gravitational parameter radius = 7000e3;% meters v = sqrt(mu/radius); % speed initialPosition = [radius*cosd(inclination),0,-radius*sind(inclination)]'; initialVelocity = [0 v 0]';
Примите, что направление X относящейся к космическому кораблю системы координат тела является радиальным направлением, z-направление является нормальным направлением орбитальной плоскости, и направление Y завершает правило правой руки. Используйте предположения, чтобы задать ориентацию системы координат тела в исходном положении.
orientation = quaternion([0 inclination 0],'eulerd','zyx','frame');
Опишите скорость вращения и угловое ускорение траектории в системе координат тела платформы.
omega = v/radius; angularVelocity = [0 0 omega]'; a = v^2/radius; acceleration = [-a 0 0]';
Установите время симуляции одного орбитального периода. Задайте шаг симуляции как 2 секунды.
tFinal = 2*pi/omega; dt = 2; sampleRate = 1/dt; tspan = 0:dt:tFinal; numSteps = length(tspan);
Создайте относящуюся к космическому кораблю траекторию. Поскольку ускорение и скорость вращения космического корабля остаются постоянными относительно относящейся к космическому кораблю системы координат тела, задают их как константы. Сгенерируйте положение и ориентацию выходные параметры вдоль траектории при помощи kinematicTrajectory объект.
traj = kinematicTrajectory('SampleRate',sampleRate, ... 'Position',initialPosition, ... 'Velocity',initialVelocity, ... 'Orientation',orientation, ... 'AngularVelocity',angularVelocity, ... 'Acceleration',acceleration, ... 'AccelerationSource','Property', ... 'AngularVelocitySource','Property'); % Generate position and orientation outputs. positions = NaN(3,numSteps); orientations = zeros(numSteps,1,'quaternion'); for i = 1:numSteps [positions(:,i),orientations(i)] = traj(); end
Используйте helperGlobeView класс и theaterPlot показать траекторию.
viewer = helperGlobeView(0,[60 0]); tp = theaterPlot('Parent',gca,... 'XLimits',1.2*[-radius radius],... 'YLimits',1.2*[-radius radius],... 'ZLimits',1.2*[-radius radius]); tPlotter = trajectoryPlotter(tp,'LineWidth',2); pPlotter = platformPlotter(tp,'MarkerFaceColor','m'); legend(gca,'off') plotTrajectory(tPlotter,{positions'}) % Use a cube with exaggerated dimensions to represent the spacecraft. dims = struct('Length',8e5,'Width',4e5,'Height',2e5,'OriginOffset',[0 0 0]); for i = 1:numSteps plotPlatform(pPlotter,positions(:,i)',dims,orientations(i)) % Since the reference frame is the ECI frame, earth rotates with respect to it. rotate(viewer,dt) end

В этой теме вы изучили, как использовать три объекта траектории настроить ваши собственные траектории на основе доступной информации. Кроме того, вы изучили принципиальные различия в применении их. Эта таблица подсвечивает основные атрибуты этих объектов траектории.
| Объект траектории | Входные параметры положения | Линейные скоростные входные параметры | Ориентация | Ускорение и входные параметры скорости вращения | Рекомендуемый промежуток расстояния |
|---|---|---|---|---|---|
waypointTrajectory | Декартов waypoints описывается в фиксированной системе координат (NED или ENU) | Одна из этих опций:
| Одна из этих опций:
| Не может задать | Из десятков к сотням километров |
geoTrajectory
| Геодезический waypoints в системе координат ECEF | Одна из этих опций:
| Одна из этих опций:
| Не может задать | От сотен до тысяч километров |
kinematicTrajectory | Исходная позиция выражена в выбранной, зафиксированной системе координат | Только начальная скорость в фиксированной системе координат | Только начальная ориентация в фиксированной системе координат | Задайте ускорение и скорость вращения в системе координат тела платформы | Неограниченный промежуток расстояния |
