Увеличение объекта для взвешенной смешанной чувствительности H ∞ и H 2 формирующих цикл проекта
P = augw(G,W1,W2,W3)P увеличенный объект следующей схемы.
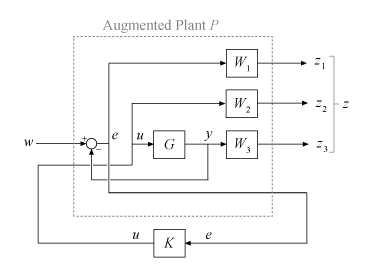
Эта структура управления используется в смешанном H ∞ синтез, который позволяет вам спроектировать H ∞ контроллер путем одновременного формирования частотных характеристик для отслеживания и подавления помех, шумоподавления и робастности и усилия контроллера. Для получения дополнительной информации смотрите, что Цикл Смешанной Чувствительности Формирует.
Предположим, что вы хотите синтезировать стабилизировавшийся устойчивый контроллер для системы следующей схемы. Контроллер должен также отклонить воздействия, введенные на объекте выход.

Объект, G, нестабильная система первого порядка.
G = tf(1,[1 -1]);
Настраивать эту проблему для hinfsyn, вставьте функцию взвешивания W1 это получает цель подавления помех и другую функцию взвешивания W3 осуществлять робастность. Задайте эти функции взвешивания как инверсии желаемых форм цикла для чувствительности S и дополнительная чувствительность T, соответственно. (См., что Цикл Смешанной Чувствительности Формирует.)
В данном примере выберите W1 с:
Низкочастотное усиление 100 (40 дБ)
Перекрестное соединение на 0 дБ на уровне 0,5 рад/с
Высокочастотное усиление 0,25 (–12 дБ)
Выберите W3 иметь противоположные низкочастотные и высокочастотные усиления.
W1 = makeweight(100,[1 0.5],0.25); W3 = makeweight(0.25,[1 0.5],100); bodemag(W1,W3)

В данном примере не задавайте W2 (никакое ограничение на усилие по управлению). Создайте увеличенный объект, P.
P = augw(G,W1,[],W3);
G имеет вход того и один выход. Увеличенный объект имеет дополнительный вход для управляющего сигнала и дополнительные выходные параметры для каждого из весов.
size(P)
State-space model with 3 outputs, 2 inputs, and 3 states.
Вводы и выводы P сгруппированы, чтобы отслеживать воздействие и входные параметры управления и ошибку и измерение выходные параметры. Например, пример выходные группы. Группа Y1 содержит две ошибки выходные параметры z и группа Y2 содержит одно измерение выход.
P.OutputGroup
ans = struct with fields:
Y1: [1 2]
Y2: 3
Можно теперь использовать P для системы управления. Например, используйте hinfsyn спроектировать оптимальный контроллер, который соответствует конструктивным требованиям, заданным W1 и W3.
[K,CL,gamma] = hinfsyn(P); gamma
gamma = 0.9946
P — Увеличенный объектУвеличенный объект, возвращенный как пространство состояний (ss) модель. P может быть любая модель LTI с входными параметрами [w; u] и выходные параметры [z; y. augw группирует вводы и выводы P использование ss свойства InputGroup и OutputGroup таким образом, что:
P.InputGroup имеет поле U1 содержа входные параметры, соответствующие w и полю U2 содержа входные параметры, соответствующие u.
P.OutputGroup имеет поле Y1 содержа выходные параметры, соответствующие z и группе Y2 содержа выходные параметры, соответствующие e.
Здесь, {w; u} и {z; e} является вводами и выводами P в следующей системе управления.
Для H ∞ или H 2 синтеза, модели G и W1,W2,W3 должно быть соответствующим. Другими словами, они должны быть ограничены как (для передаточных функций непрерывного времени) или (для передаточных функций дискретного времени). Кроме того, W1,W2,W3 должно быть устойчивым. Объект G должно быть stabilizable и обнаруживаемым. В противном случае, получившийся P не stabilizable никаким контроллером.
augw производит увеличенный объект P (s), данный:
Разделение встраивается с помощью P = mktito(P,NY,NU), который устанавливает P.InputGroup и P.OutputGroup свойства можно следующим образом.
[r,c] = size(P);
P.InputGroup = struct('U1',1:c-NU,'U2',c-NU+1:c);
P.OutputGroup = struct('Y1',1:r-NY,'Y2',r-NY+1:r);
h2syn | hinfsyn | makeweight | mixsyn
