Объединенный промах 2DOF колесо с диском, барабаном или сопоставленным тормозом
Vehicle Dynamics Blockset / Колеса и Шины
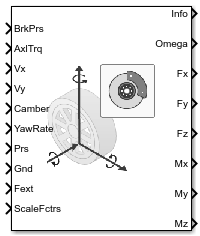
Блок Combined Slip Wheel 2DOF реализует продольное и боковое поведение колеса, охарактеризованного Волшебной Формулой [1] и [2]. Можно импортировать собственные данные о шине или использование адаптированные наборы данных шины, обеспеченные Глобальным Центром Автомобильной Симуляции Эффективности (GCAPS). Используйте блок в автомобильной трансмиссии и симуляциях транспортного средства, где низкочастотная дорога шины и тормозные усилия обязаны определять ускорение транспортного средства, торможение и сопротивление качению колеса. Блок подходит для приложений, которые требуют объединенного бокового промаха, например, в боковом движении и исследованиях устойчивости рыскания.
На основе крутящего момента автомобильной трансмиссии, тормозного давления, дорожной высоты, угла изгиба колеса и давления инфляции, блок определяет уровень вращения колеса, вертикальное движение, силы, и моменты во всех шести степенях свободы (DOF). Используйте вертикальную степень свободы, чтобы изучить резонансы приостановки шины от дорожных профилей или движения шасси.
Используйте параметр Tire type, чтобы выбрать источник данных о шине.
| Цель | Действие |
|---|---|
Реализуйте Волшебную Формулу с помощью эмпирических уравнений [1] и [2]. Подходящие коэффициенты использования уравнений, которые соответствуют параметрам блоков. | Обновите параметры блоков с подходящими коэффициентами из файла:
|
Реализуйте адаптированные наборы данных шины, обеспеченные Глобальным Центром Автомобильной Симуляции Эффективности (GCAPS). | Обновите применимые параметры блоков с GCAPS адаптированные данные о шине:
|
Используйте параметр Brake Type, чтобы выбрать тормоз.
| Цель | Тормозите установку типа |
|---|---|
Никакое торможение |
|
Реализуйте тормоз, который преобразует давление в тормозном цилиндре в тормозное усилие |
|
Реализуйте симплексный барабанный тормоз, который преобразует приложенную силу и геометрию тормоза в сетевой тормозной момент |
|
Реализуйте интерполяционную таблицу, которая является функцией скорости колеса и прикладываемого тормозного давления |
|
Блок вычисляет инерционный ответ колеса, удовлетворяющего:
Потери оси
Тормозите и управляйте крутящим моментом
Утомите сопротивление качению
Оснуйте контакт через дорожный шиной интерфейс
Чтобы реализовать Волшебную Формулу, блок использует эти уравнения.
| Вычисление | Уравнения |
|---|---|
Продольная сила | |
Боковая сила - чистый занос | |
Боковая сила - объединенный промах | |
Вертикальная динамика | Шина и уравнения 4. E68, 4. E1, 4. E2a Vehicle Dynamics [2], и 4. 2 миллиарда евро |
Опрокидывание пары | |
Сопротивление качению |
|
Выравнивание момента | |
Выравнивание крутящего момента - объединенный промах |
Входной крутящий момент является суммированием прикладного крутящего момента оси, тормозного момента, и момент, являющийся результатом объединенного крутящего момента шины.
В настоящий момент являясь результатом объединенного крутящего момента шины, блок реализует тяговые силы колеса и сопротивление качению с динамикой первого порядка. Сопротивлению качению параметрировали постоянную времени в терминах релаксационной длины.
Если тормоза включены, блок определяет торможение заблокированное или разблокированное условие на основе идеализированной сухой модели трения муфты. На основе условия тупика блок реализует их трение и динамические модели.
| Если | Условие тупика | Модель трения | Динамическая модель |
|---|---|---|---|
Разблокированный | |||
Заблокированный |
Уравнения используют эти переменные.
| ω | Скорость вращения колеса |
| a | Скорость независимый компонент силы |
| b | Линейный скоростной компонент силы |
| c | Квадратичный скоростной компонент силы |
| Le | Утомите релаксационную длину |
| J | Момент инерции |
| My | Крутящий момент сопротивления качению |
| Ta | Прикладной крутящий момент оси об оси вращения колеса |
| Tb | Тормозной момент |
| Td | Объединенный крутящий момент шины |
| Tf | Фрикционный крутящий момент |
| Ti | Сетевой входной крутящий момент |
| Tk | Кинетический фрикционный крутящий момент |
| To | Сетевой выходной крутящий момент |
| Ts | Статический фрикционный крутящий момент |
| Fc | Прикладывавшая сила муфты |
| Fx | Продольная сила, разработанная дорогой шины, взаимодействует через интерфейс должный уменьшиться |
| Reff | Эффективный радиус муфты |
| Ro | Кольцевой диск внешний радиус |
| Ri | Кольцевой диск внутренний радиус |
| Re | Эффективный радиус шины, в то время как при загрузке и при данном давлении |
| Vx | Продольная скорость оси |
| Fz | Транспортное средство нормальная сила |
| ɑ | Экспонента давления воздуха в шине |
| β | Нормальная экспонента силы |
| pi | Давление воздуха в шине |
| μs | Коэффициент статического трения |
| μk | Коэффициент кинетического трения |
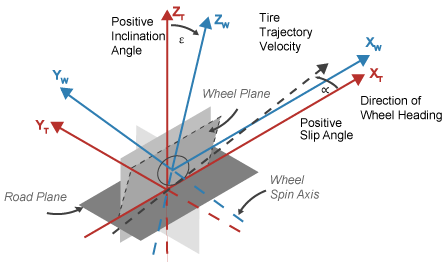
Чтобы разрешить силы и моменты, блок использует ориентацию Z-Up систем координат шины и колеса.
Утомите оси системы координат (XT, YT, ZT) фиксируются в системе координат, присоединенной к шине. Источник в контакте шины с землей.
Оси системы координат колеса (XW, YW, ZW) фиксируются в системе координат, присоединенной к колесу. Источник стоит у руля центр.
Если вы задаете параметр Brake Type Disc, блок реализует дисковый тормоз. Этот рисунок показывает виды сбоку и виды спереди дискового тормоза.
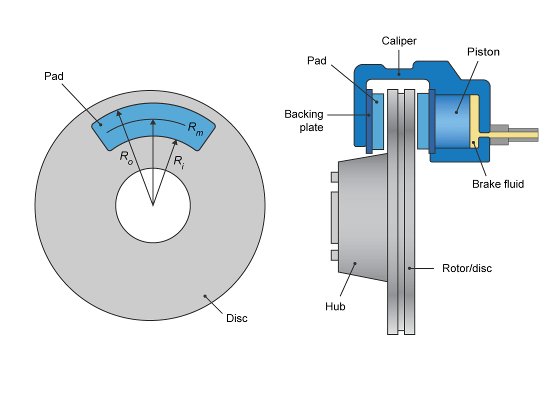
Дисковый тормоз преобразует давление в тормозном цилиндре от тормозного цилиндра в силу. Дисковый тормоз прикладывает силу в среднем радиусе тормозной колодки.
Блок использует эти уравнения, чтобы вычислить момент привода для дискового тормоза.
Уравнения используют эти переменные.
| T | Момент привода |
| P | Прикладываемое тормозное давление |
| N | Скорость колеса |
| Npads | Количество тормозных колодок в блоке дискового тормоза |
| μstatic | Коэффициент статического трения пары диск-колодка |
| μ | Коэффициент кинетического трения пары диск-колодка |
| Ba | Внутренний диаметр тормозного цилиндра суппорта |
| Rm | Средний радиус тормозной колодки обеспечивает приложение на тормозном роторе |
| Ro | Внешний радиус тормозной колодки |
| Ri | Внутренний радиус тормозной колодки |
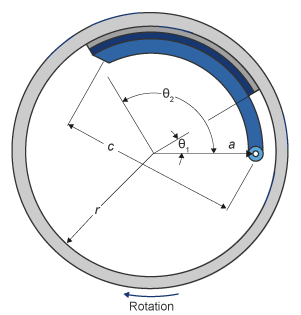
Если вы задаете параметр Brake Type Drum, блок реализует статический (установившийся) симплексный барабанный тормоз. Симплексный барабанный тормоз состоит из одного двухстороннего гидравлического привода и двух тормозных колодок. Тормозные колодки не совместно используют общий контакт стержня.
Симплексная модель барабанного тормоза использует приложенную силу и геометрию тормоза, чтобы вычислить крутящий момент привода для каждой тормозной колодки. Модель барабана принимает, что приводы и геометрия обуви симметричны для обеих сторон, позволяя одному набору геометрии и параметров трения использоваться для обоих ботинок.
Блок реализует уравнения, которые выведены из этих уравнений в Основных принципах Элементов Машины.
Уравнения используют эти переменные.
| T | Момент привода |
| P | Прикладываемое тормозное давление |
| N | Скорость колеса |
| μstatic | Коэффициент статического трения пары диск-колодка |
| μ | Коэффициент кинетического трения пары диск-колодка |
| Trshoe | Момент привода правого ботинка |
| Tlshoe | Момент привода левого ботинка |
| a | Расстояние от барабана сосредотачивается к центру контакта стержня обуви |
| c | Расстояние от стержня обуви прикрепляет центр, чтобы тормозить связь привода на тормозной колодке |
| r | Барабан внутренний радиус |
| Ba | Внутренний диаметр тормозного цилиндра суппорта |
| Θ1 | Угол от стержня обуви прикрепляет центр, чтобы запуститься материала тормозной колодки по обуви |
| Θ2 | Угол от стержня обуви прикрепляет центр к концу материала тормозной колодки по обуви |
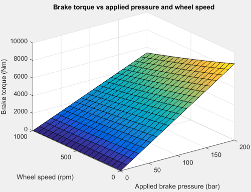
Если вы задаете параметр Brake Type Mapped, блок использует интерполяционную таблицу, чтобы определить момент привода.
Уравнения используют эти переменные.
| T | Момент привода |
Интерполяционная таблица момента привода | |
| P | Прикладываемое тормозное давление |
| N | Скорость колеса |
| μstatic | Коэффициент трения поверхности клавиатуры барабана взаимодействует через интерфейс при статических условиях |
| μ | Коэффициент трения интерфейса ротора клавиатуры диска |
Интерполяционная таблица для момента привода, , функция прикладываемого тормозного давления и скорости колеса, где:
T является моментом привода в N · m.
P является прикладываемым тормозным давлением в панели.
N является скоростью колеса в об/мин.
Tire Type — Выберите типExternal file (значение по умолчанию) | Light passenger car 205/60R15 | Mid-size passenger car 235/45R18 | Performance car 225/40R19 | SUV 265/50R20 | Light truck 275/65R18 | Commercial truck 295/75R22.5Используйте параметр Tire type, чтобы выбрать источник данных о шине.
| Цель | Действие |
|---|---|
Реализуйте Волшебную Формулу с помощью эмпирических уравнений [1] и [2]. Подходящие коэффициенты использования уравнений, которые соответствуют параметрам блоков. | Обновите параметры блоков с подходящими коэффициентами из файла:
|
Реализуйте адаптированные наборы данных шины, обеспеченные Глобальным Центром Автомобильной Симуляции Эффективности (GCAPS). | Обновите применимые параметры блоков с GCAPS адаптированные данные о шине:
|
Brake Type — Выберите типNone | Disc | Drum | MappedИспользуйте параметр Brake Type, чтобы выбрать тормоз.
| Цель | Тормозите установку типа |
|---|---|
Никакое торможение |
|
Реализуйте тормоз, который преобразует давление в тормозном цилиндре в тормозное усилие |
|
Реализуйте симплексный барабанный тормоз, который преобразует приложенную силу и геометрию тормоза в сетевой тормозной момент |
|
Реализуйте интерполяционную таблицу, которая является функцией скорости колеса и прикладываемого тормозного давления |
|
Static friction coefficient, mu_static — Статическое трениеscalarСтатический коэффициент трения, безразмерный.
Чтобы включить этот параметр, для параметра Brake Type, задают один из этих типов:
Disc
Drum
Mapped
Kinetic friction coefficient, mu_kinetic — Кинетическое трениеscalarКинематический коэффициент трения, безразмерный.
Чтобы включить этот параметр, для параметра Brake Type, задают один из этих типов:
Disc
Drum
Mapped
Disc brake actuator bore, disc_abore — Расстояние скукиscalarПривод дискового тормоза перенес в m.
Чтобы включить параметры дискового тормоза, выберите Disc для параметра Brake Type.
Brake pad mean radius, Rm — РадиусscalarСредний радиус тормозной колодки, в m.
Чтобы включить параметры дискового тормоза, выберите Disc для параметра Brake Type.
Number of brake pads, num_pads количествоscalarКоличество тормозных колодок.
Чтобы включить параметры дискового тормоза, выберите Disc для параметра Brake Type.
Drum brake actuator bore, disc_abore — Расстояние скукиscalarПривод барабанного тормоза перенес в m.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Shoe pin to drum center distance, drum_a — РасстояниеscalarКонтакт обуви, чтобы барабанить расстояние между центрами, в m.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Shoe pin center to force application point distance, drum_c — РасстояниеscalarКонтакт обуви сосредотачивается, чтобы обеспечить расстояние точки приложения в m.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Drum internal radius, drum_r — РадиусscalarБарабан внутренний радиус, в m.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Shoe pin to pad start angle, drum_theta1 \anglescalarКонтакт обуви, чтобы заполнить запускает угол в градусе.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Shoe pin to pad end angle, drum_theta2 \anglescalarКонтакт обуви, чтобы заполнить угол конца, в градусе.
Чтобы включить параметры барабанного тормоза, выберите Drum для параметра Brake Type.
Brake actuator pressure breakpoints, brake_p_bpt — Точки остановаvectorТормозите точки останова давления привода в панели.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра Brake Type.
Wheel speed breakpoints, brake_n_bpt — Точки остановаvectorТочки останова скорости колеса, в об/мин.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра Brake Type.
Brake torque map, f_brake_t — Интерполяционная таблицаarrayИнтерполяционная таблица для момента привода, , функция прикладываемого тормозного давления и скорости колеса, где:
T является моментом привода в N · m.
P является прикладываемым тормозным давлением в панели.
N является скоростью колеса в об/мин.
Чтобы включить сопоставленные параметры тормоза, выберите Mapped для параметра Brake Type.
Tire file or object, tireParamSet — Утомите файлvdynPassCar.mat (значение по умолчанию) | .tir | .txtФайл шины .tir или объект, содержащий эмпирические данные к шине модели продольное и боковое поведение с Волшебной Формулой. Если вы обеспечиваете .txt файл, убедитесь, что файл содержит имена, которые соответствуют параметрам блоков.
Обновите параметры блоков с подходящими коэффициентами из файла:
Установите Tire type на External file.
На Wheel and Tire Parameters> панель Tire, выберите Select file.
Выберите содействующий файл шины.
Выберите Update mask values from file. В диалоговом окне, которое предлагает вам подтверждение, нажмите OK. Блок обновляет параметры.
Выберите Apply.
Maximum pressure, PRESMAX — ДавлениеscalarМаксимальное давление, PRESMAX, в Па.
Minimum pressure, PRESMIN — ДавлениеscalarМинимальное давление, PRESMIN, в Па.
Maximum normal force, FZMAX СилаscalarМаксимальная нормальная сила, FZMAX, в N.
Minimum normal force, FZMIN СилаscalarМинимальная нормальная сила, FZMIN, в N.
Velocity tolerance used to handle low velocity situations, VXLOW ДопускscalarСкоростной допуск раньше обрабатывал низкие ситуации скорости, VXLOW, в m/s.
Max allowable slip ratio (absolute), KPUMAX — ОтношениеscalarMax допустимое (абсолютное) отношение промаха, KPUMAX, безразмерный.
Minimum allowable slip ratio (absolute), KPUMIN — ОтношениеscalarМинимальное допустимое (абсолютное) отношение промаха, KPUMIN, безразмерный.
Max allowable slip angle (absolute), ALPMAX \anglescalarMax допустимый (абсолютный) угол промаха, ALPMAX, в рад.
Minimum allowable slip angle (absolute), ALPMIN \anglescalarМинимальный допустимый (абсолютный) угол промаха, ALPMIN, в рад.
Maximum allowable camber angle, CAMMAX \anglescalarМаксимальный допустимый угол изгиба CAMMAX, в рад.
Minimum allowable camber angle, CAMMIN \anglescalarМинимальный допустимый угол изгиба, CAMMIN, в рад.
Nominal longitudinal speed, LONGVL — СкоростьscalarНоминальная продольная скорость, LONGVL, в m/s.
Initial rotational velocity, omegao — СкоростьscalarНачальная вращательная скорость, в rad/s.
Rotational damping, br — Затухание1e-3 (значение по умолчанию) | scalarВращательное затухание, br, в N · m·.
Unloaded radius, UNLOADED_RADIUS — РадиусscalarРазгруженный радиус, UNLOADED_RADIUS, в m.
Nominal pressure, NOMPRES — ДавлениеscalarНоминальное давление, NOMPRES, в Па.
Nominal normal force, FNOMIN СилаscalarНоминальная нормальная сила, FNOMIN, в N.
Wheel width, WIDTH widthscalarШирина колеса, WIDTH, в m.
Rim radius, RIM_RADIUS — РадиусscalarРадиус оправы, RIM_RADIUS, в m.
Wheel mass, MASS — МассаscalarМасса колеса, MASS, в kg.
Rotational inertia (rolling axis), IYY — ИнерцияscalarВращательная инерция (прокручивающий ось), IYY, в kg · м^2.
Gravity, GRAVITY — Сила тяжестиscalarСила тяжести, GRAVITY, в м/с^2.
Initial tire displacement, zo — СмещениеscalarНачальное смещение шины, zo, в m.
Initial wheel vertical velocity (wheel fixed frame), zdoto — СкоростьscalarНачальное колесо вертикальная скорость (колесо зафиксированная система координат), zdoto, в m/s.
Effective rolling radius at low load stiffness, BREFF — ЖесткостьscalarЭффективный радиус прокрутки в низкой жесткости загрузки, BREFF, безразмерном.
Effective rolling radius peak value, DREFF — РадиусscalarЭффективное пиковое значение радиуса прокрутки, DREFF, безразмерный.
Effective rolling radius at high load stiffness, FREFF — РадиусscalarЭффективный радиус прокрутки в высокой жесткости загрузки, FREFF, безразмерном.
Unloaded to nominal rolling radius ratio, Q_RE0 — ОтношениеscalarРазгруженный к номинальному отношению радиуса прокрутки, Q_RE0, безразмерному.
Radius rotational speed dependence, Q_V1 — СкоростьscalarЗависимость скорости вращения радиуса, Q_V1, безразмерный.
Stiffness rotational speed dependence, Q_V2 — СкоростьscalarЗависимость скорости вращения жесткости, Q_V2, безразмерный.
Linear load change with deflection, Q_FZ1 — Загрузите изменениеscalarЛинейное изменение загрузки с отклонением, Q_FZ1, безразмерным.
Quadratic load change with deflection, Q_FZ2 — Загрузите изменениеscalarКвадратичное изменение загрузки с отклонением, Q_FZ2, безразмерным.
Linear load change with deflection and quadratic camber, Q_FZ3 — Загрузите изменениеscalarЛинейное изменение загрузки с отклонением и квадратичным изгибом, Q_FZ3, безразмерным.
Load response to longitudinal force, Q_FCX СилаscalarЗагрузите ответ на продольную силу, Q_FCX, безразмерный.
Load response to lateral force, Q_FCY СилаscalarЗагрузите ответ на боковую силу, Q_FCY, безразмерный.
Vertical stiffness change due to lateral load dependency on lateral stiffness, Q_FCY2 — ЖесткостьscalarВертикальное изменение жесткости из-за боковой зависимости от загрузки от боковой жесткости, Q_FCY2, безразмерного.
Stiffness response to pressure, PFZ1 — ЖесткостьscalarОтвет жесткости на давление, PFZ1, безразмерный.
Vertical tire stiffness, VERTICAL_STIFFNESS — ЖесткостьscalarВертикальная жесткость шины, VERTICAL_STIFFNESS, в N/m.
Vertical tire damping, VERTICAL_DAMPING — ЗатуханиеscalarВертикальное затухание шины, VERTICAL_DAMPING, в N · s/m.
Rim bottoming out offset, BOTTOM_OFFST — СмещениеscalarОправа, достигающая нижнего предела смещение, BOTTOM_OFFST, в m.
Bottoming out stiffness, BOTTOM_STIFF — Жесткость2e6 (значение по умолчанию) | scalarДостигая нижнего предела жесткость, BOTTOM_STIFF, в N/m.
Longitudinal stiffness, LONGITUDINAL_STIFFNESS — ЖесткостьscalarПродольная жесткость, LONGITUDINAL_STIFFNESS, в N/m.
Lateral stiffness, LATERAL_STIFFNESS — ЖесткостьscalarПродольная жесткость, LATERAL_STIFFNESS, в N/m.
Linear vertical deflection influence on longitudinal stiffness, PCFX1 — Влияние отклоненияscalarЛинейное вертикальное отклонение влияет на продольной жесткости, PCFX1, безразмерном.
Quadratic vertical deflection influence on longitudinal stiffness, PCFX2 — Влияние отклоненияscalarКвадратичное вертикальное отклонение влияет на продольной жесткости, PCFX2, безразмерном.
Pressure dependency on longitudinal stiffness, PCFX3 — Зависимость от давленияscalarЗависимость от давления от продольной жесткости, PCFX3, безразмерного.
Linear vertical deflection influence on lateral stiffness, PCFY1 — Влияние отклоненияscalarЛинейное вертикальное отклонение влияет на боковой жесткости, PCFY1, безразмерном.
Quadratic vertical deflection influence on lateral stiffness, PCFY2 — Влияние отклоненияscalarКвадратичное вертикальное отклонение влияет на боковой жесткости, PCFY2, безразмерном.
Pressure dependency on longitudinal stiffness, PCFY3 — Зависимость от давленияscalarЗависимость от давления от продольной жесткости, PCFY3, безразмерного.
Contact length square root term, Q_RA1 — Термин длиныscalarСвяжитесь с термином квадратного корня длины, Q_RA1, безразмерным.
Contact length linear term, Q_RA2 — Термин длиныscalarСвяжитесь с линейным членом длины, Q_RA2, безразмерным.
Contact width root term, Q_RB1 — Термин шириныscalarСвяжитесь с корневым термином ширины, Q_RB1, безразмерным.
Contact width linear term, Q_RB2 — Термин шириныscalarСвяжитесь с линейным членом ширины Q_RB2, безразмерный.
Cfx shape factor, PCX1 — Масштабный факторscalarМасштабный фактор, Cfx, PCX1, безразмерный.
Longitudinal friction at nominal normal load, PDX1 — ТрениеscalarПродольное трение при номинальной нормальной загрузке, PDX1, безразмерном.
Frictional variation with load, PDX2 — Изменение тренияscalarФрикционное изменение с загрузкой, PDX2, безразмерным.
Frictional variation with camber, PDX3 — Изменение тренияscalarФрикционное изменение с изгибом, PDX3, в 1/rad^2.
Longitudinal curvature at nominal normal load, PEX1 — ИскривлениеscalarПродольное искривление при номинальной нормальной загрузке, PEX1, безразмерном.
Variation of curvature factor with load, PEX2 — Изменение искривленияscalarИзменение фактора искривления с загрузкой, PEX2, безразмерным.
Variation of curvature factor with square of load, PEX3 — Изменение искривленияscalarИзменение фактора искривления с квадратом загрузки, PEX3, безразмерного.
Longitudinal curvature factor with slip, PEX4 — ИскривлениеscalarПродольный фактор искривления с промахом, PEX4, безразмерным.
Longitudinal slip stiffness at nominal normal load, PKX1 — ЖесткостьscalarПродольная жесткость промаха при номинальной нормальной загрузке, PKX1, безразмерном.
Variation of slip stiffness with load, PKX2 — Изменение жесткостиscalarИзменение жесткости промаха с загрузкой, PKX1, безразмерным.
Slip stiffness exponent factor, PKX3 — Подсуньте жесткостьscalarПодсуньте фактор экспоненты жесткости, PKX3, безразмерный.
Horizontal shift in slip ratio at nominal normal load, PHX1 — Подсуньте сдвиг отношенияscalarГоризонталь переключает отношение промаха на нижний регистр при номинальной нормальной загрузке, PHX1, безразмерном.
Variation of horizontal slip ratio with load, PHX2 — Подсуньте изменениеscalarИзменение горизонтального отношения промаха с загрузкой, PHX2, безразмерным.
Vertical shift in load at nominal normal load, PVX1 — Загрузите сдвиг1.59236164471432e-05 (значение по умолчанию) | scalarВертикальный сдвиг в загрузке при номинальной нормальной загрузке, PVX1, безразмерном.
Variation of vertical shift with load, PVX2 — Загрузите изменениеscalarИзменение вертикального сдвига с загрузкой, PVX2, безразмерным.
Linear variation of longitudinal slip stiffness with tire pressure, PPX1 — Изменение жесткостиscalarЛинейное изменение продольной жесткости промаха с давлением воздуха в шине, PPX1, безразмерным.
Quadratic variation of longitudinal slip stiffness with tire pressure, PPX2 — Изменение жесткостиscalarКвадратичное изменение продольной жесткости промаха с давлением воздуха в шине, PPX2, безразмерным.
Linear variation of peak longitudinal friction with tire pressure, PPX3 — Изменение тренияscalarЛинейное изменение пикового продольного трения с давлением воздуха в шине, PPX3, безразмерным.
Quadratic variation of peak longitudinal friction with tire pressure, PPX4 — Изменение тренияscalarКвадратичное изменение пикового продольного трения с давлением воздуха в шине, PPX4, безразмерным.
Combined slip Fx slope factor reduction, RBX1 — Объединенный промах продольная сила клонится факторное сокращениеscalarОбъединенный промах продольная сила, Fx, клонится факторное сокращение, RBX1, безразмерный.
Slip ratio Fx slope reduction variation, RBX2 — Подсуньте отношению продольное изменение сокращения наклона силыscalarПодсуньте отношению продольную силу, Fx, наклонное изменение сокращения, RBX2, безразмерный.
Camber influence on combined slip Fx stiffness, RBX3 — Влияние изгиба на объединенный промах продольная жесткость силыscalarВлияние изгиба на объединенный промах продольная сила, Fx, жесткость, RBX3, безразмерный.
Shape factor for combined slip Fx reduction, RCX1 — Масштабный фактор для объединенного промаха продольное сокращение силыscalarМасштабный фактор для объединенного промаха продольная сила, Fx, сокращение, RCX1, безразмерный.
Combined Fx curvature factor, REX1 — Объединенный продольный фактор искривления силыscalarОбъединенная продольная сила, Fx, фактор искривления, REX1, безразмерный.
Combined Fx curvature factor with load, REX2 — Объединенный продольный фактор искривления силыscalarОбъединенная продольная сила, Fx, фактор искривления с загрузкой, REX2, безразмерным.
Combined slip Fx shift factor reduction, RHX1 — Объединенный промах продольный фактор промаха силыscalarОбъединенный промах продольная сила, Fx, сокращение коэффициента сдвига, RHX1, безразмерный.
Vertical shift of overturning moment, QSX1 — Опрокидывание моментаscalarВертикальный сдвиг опрокидывающегося момента, QSX1, безразмерного.
Overturning moment due to camber, QSX2 — Опрокидывание момента из-за изгибаscalarОпрокидывая момент из-за изгиба, QSX2, безразмерного.
Overturning moment due to Fy, QSX3 — Опрокидывание момента из-за боковой силыscalarОпрокидывая момент из-за боковой силы, QSX3, безразмерного.
Mx combined lateral force load and camber, QSX4 — Опрокидывание моментаscalarОпрокидывая момент, Mx, момент объединил боковую загрузку силы и изгиб, QSX4, безразмерный.
Mx load effect due to lateral force and camber, QSX5 — Опрокидывание моментаscalarОпрокидывание момента, Mx, загружает эффект из-за боковой силы и изгиба, QSX5, безразмерного.
Mx load effect due to B-factor, QSX6 — Опрокидывание моментаscalarОпрокидывание момента, Mx, загружает эффект из-за B-фактора, QSX6, безразмерного.
Mx due to camber and load, QSX7 — Опрокидывание моментаscalarОпрокидывая момент, Mx, из-за изгиба и загрузки, QSX7, безразмерного.
Mx due to lateral force and load, QSX8 — Опрокидывание моментаscalarОпрокидывая момент, Mx, из-за боковой силы и загрузки, QSX8, безразмерного.
Mx due to B-factor of lateral force and load, QSX9 — Опрокидывание моментаscalarОпрокидывая момент, Mx, из-за B-фактора боковой силы и загрузки, QSX9, безразмерного.
Mx due to vertical force and camber, QSX10 — Опрокидывание моментаscalarОпрокидывая момент, Mx, из-за вертикальной силы и изгиба, QSX10, безразмерного.
Mx due to B-factor of vertical force and camber, QSX11 — Опрокидывание моментаscalarОпрокидывая момент, Mx, из-за B-фактора вертикальной силы и изгиба, QSX11, безразмерного.
Mx due to squared camber, QSX12 — Опрокидывание моментаscalarОпрокидывая момент, Mx, из-за изгиба в квадрате, QSX12, безразмерного.
Mx due to lateral force, QSX13 — Опрокидывание моментаscalarОпрокидывая момент, Mx, из-за боковой силы, QSX13, безразмерного.
Mx due to lateral force with camber, QSX14 — Опрокидывание моментаscalarОпрокидывая момент, Mx, из-за боковой силы с изгибом, QSX14, безразмерным.
Mx due to inflation pressure, PPMX1 — Опрокидывание момента из-за давленияscalarОпрокидывая момент, Mx, из-за давления инфляции, PPMX1, безразмерного.
Cfy shape factor for lateral force, PCY1 — Боковой масштабный фактор силыscalarМасштабный фактор для боковой силы, Cfy, PCY1, безразмерного.
Lateral friction muy, PDY1 — Боковое трениеscalarБоковое трение, μy, PDY1, безразмерный.
Lateral friction variation of muy with load, PDY2 — Боковое изменение тренияscalarИзменение бокового трения, μy, с загрузкой, PDY2, безразмерным.
Lateral friction variation of muy with squared camber, PDY3 — Боковое изменение тренияscalarИзменение бокового трения, μy, с изгибом в квадрате, PDY3, безразмерным.
Efy lateral curvature at nominal force FZNOM, PEY1 — Боковое искривление в номинальной силеscalarБоковое искривление, Efy, в номинальной силе, FZNOM, PEY1, безразмерном.
Efy curvature variation with load PEY2 — Боковое изменение искривленияscalarБоковое искривление, Efy, изменение с загрузкой, PEY2, безразмерным.
Efy curvature constant camber dependency, PEY3 — Боковое постоянное искривлениеscalarБоковое искривление, Efy, постоянная зависимость от изгиба, PEY3, безразмерный.
Efy curvature variation with camber, PEY4 — Боковое изменение искривленияscalarБоковое искривление, Efy, изменение с изгибом, PEY4, безразмерным.
Efy curvature variation with camber squared, PEY5 — Боковое изменение искривленияscalarБоковое искривление, Efy, изменение с изгибом придало квадратную форму, PEY5, безразмерный.
Maximum KFy/FZNOM stiffness, PKY1 — Максимальная жесткостьscalarМаксимальное ответвление обеспечивает жесткость, KFy, к номинальной силе, FZNOM, отношению, PKY1, безразмерному.
Load at maximum KFy/FZNOM stiffness, PKY2 загрузкаscalarЗагрузите в максимальной боковой жесткости силы, KFy, к номинальной силе, FZNOM, отношению, PKY2, безразмерному.
KFy/FZNOM stiffness variation with camber, PKY3 — Изменение жесткостиscalarБоковая жесткость силы, KFy, к номинальной силе, FZNOM, изменению жесткости с изгибом, PKY3, безразмерным.
KFy curvature, PKY4 — Боковое искривление жесткости силыscalarБоковая жесткость силы, искривление KFy, PKY4, безразмерный.
Variation of peak stiffness with squared camber, PKY5 — Изменение жесткостиscalarИзменение пиковой жесткости с изгибом в квадрате, PKY5, безразмерным.
Fy camber stiffness factor, PKY6 — Боковой фактор жесткости изгиба силыscalarБоковая сила, Fy, фактор жесткости изгиба, PKY6, безразмерный.
Camber stiffness vertical load dependency, PKY7 — ЖесткостьscalarЖесткость изгиба вертикальная зависимость от загрузки, PKY7, безразмерный.
SHY horizontal shift at FZNOM, PHY1 — Горизонтальный сдвиг в номинальной силеscalarГоризонтальный сдвиг, SHY, в номинальной силе, FZNOM, PHY1, безразмерном.
SHY variation with load, PHY2 — Горизонтальное изменение сдвигаscalarГоризонтальный сдвиг, SHY, изменение с загрузкой, PHY2, безразмерным.
Svy/Fz vertical shift at FZNOM, PVY1 — Вертикальный сдвиг в номинальной силеscalarВертикальный сдвиг, Svy, в номинальной силе, FZNOM, PVY1, безразмерном.
Svy/Fz variation with load, PVY2 — Вертикальное изменение сдвига с загрузкойscalarВертикальный сдвиг, Svy, изменение с загрузкой, PVY2, безразмерным.
Svy/Fz variation with camber, PVY3 — Вертикальное изменение сдвига с изгибомscalarВертикальный сдвиг, Svy, изменение с изгибом, PVY3, безразмерным.
Svy/Fz variation with load and camber, PVY4 — Вертикальное изменение сдвига с загрузкой и изгибомscalarВертикальный сдвиг, Svy, изменение с загрузкой и изгибом, PVY4, безразмерным.
Cornering stiffness variation with inflation pressure, PPY1 — Изменение жесткости с давлениемscalarЗагоняя изменение жесткости в угол с давлением инфляции, PPY1, безразмерным.
Cornering stiffness variation with inflation pressure induced nominal load dependency, PPY2 — Изменение жесткости с давлениемscalarДвижение на повороте изменения жесткости с давлением инфляции вызвало номинальную зависимость от загрузки, PPY2, безразмерный.
Linear inflation pressure on peak lateral friction, PPY3 — ДавлениеscalarЛинейное давление инфляции на пиковое боковое трение, PPY3, безразмерный.
Quadratic inflation pressure on peak lateral friction, PPY4 — ДавлениеscalarКвадратичное давление инфляции на пиковое боковое трение, PPY4, безразмерный.
Inflation pressure effect on camber stiffness, PPY5 — ДавлениеscalarВоздействие давления инфляции на жесткости изгиба, PPY5, безразмерном.
Combined Fy reduction slope factor, RBY1 — Объединенное боковое сокращение силы клонится факторscalarОбъединенная боковая сила, Fy, сокращение клонится фактор, RBY1, безразмерный.
Fy slope reduction with slip angle, RBY2 — Боковое сокращение наклона силы с углом промахаscalarБоковая сила, Fy, наклонное сокращение с углом промаха, RBY2, безразмерным.
Fy shift reduction with slip angle, RBY3 — Боковое сокращение сдвига силы с углом промаха3.40283755070691e-06 (значение по умолчанию) | scalarБоковая сила, Fy, переключает сокращение с углом промаха, RBY3, безразмерным.
Fy combined stiffness variation from camber, RBY4 — Боковая сила объединила изменение жесткости от изгибаscalarБоковая сила, Fy, объединила изменение жесткости от изгиба, RBY4, безразмерного.
Fy combined reduction shape factor, RCY1 — Боковая сила объединила масштабный фактор сокращенияscalarБоковая сила, Fy, объединила масштабный фактор сокращения, RCY1, безразмерный.
Fy combined curvature factor, REY1 — Боковая сила объединила фактор искривленияscalarБоковая сила, Fy, объединила фактор искривления, REY1, безразмерный.
Fy combined curvature factor with load, REY2 — Боковая сила объединила фактор искривления с загрузкой7.48775032604508e-06 (значение по умолчанию) | scalarБоковая сила, Fy, объединила фактор искривления с загрузкой, REY2, безразмерным.
Fy combined reduction shift factor, RHY1 — Боковая сила объединила коэффициент сдвига сокращенияscalarБоковая сила, Fy, объединила коэффициент сдвига сокращения, RHY1, безразмерный.
Fy combined reduction shift factor with load, RHY2 — Боковая сила объединила коэффициент сдвига сокращения с загрузкой7.63650177161071e-06 (значение по умолчанию) | scalarБоковая сила, Fy, объединила коэффициент сдвига сокращения с загрузкой, RHY2, безразмерным.
Slip ratio side force Svyk/Muy*Fz at FZNOM, RVY1 — Подсуньте силу понижения отношения в номинальной силеscalarПодсуньте силу стороны отношения в номинальной силе, FZNOM, RVY1, безразмерном.
Side force Svyk/Muy*Fz variation with load, RVY2 — Изменение силы стороны с загрузкой7.48487127056197e-06 (значение по умолчанию) | scalarИзменение силы стороны с загрузкой, RVY2, безразмерным.
Side force Svyk/Muy*Fz variation with camber, RVY3 — Изменение силы стороны с изгибомscalarИзменение силы стороны с изгибом, RVY3, безразмерным.
Side force Svyk/Muy*Fz variation with slip angle, RVY4 — Изменение силы стороны с углом промахаscalarИзменение силы стороны с углом промаха, RVY4, безразмерным.
Side force Svyk/Muy*Fz variation with slip ratio, RVY5 — Изменение силы стороны с отношением промахаscalarИзменение силы стороны с отношением промаха, RVY5, безразмерным.
Side force Svyk/Muy*Fz variation with slip ratio arctangent, RVY6 — Изменение силы стороны с арктангенсом отношения промахаscalarИзменение силы стороны с арктангенсом отношения промаха, RVY6, безразмерным.
Torque resistance coefficient, QSY1 — Закрутите сопротивлениеscalarЗакрутите коэффициент сопротивления, QSY1, безразмерный.
Torque resistance due to Fx, QSY2 — Закрутите сопротивление из-за продольной силыscalarЗакрутите сопротивление из-за продольной силы, Fx, QSY2, безразмерного.
Torque resistance due to speed, QSY3 — Закрутите сопротивление из-за скоростиscalarЗакрутите сопротивление из-за скорости, QSY3, безразмерного.
Torque resistance due to speed^4, QSY4 — Закрутите сопротивление из-за скорости8.55710322455322e-05 (значение по умолчанию) | scalarЗакрутите сопротивление из-за speed^4, QSY4, безразмерного.
Torque resistance due to square of camber, QSY5 — Закрутите сопротивление из-за изгибаscalarЗакрутите сопротивление из-за квадрата изгиба, QSY5, безразмерного.
Torque resistance due to square of camber and load, QSY6 — Закрутите сопротивление из-за изгиба и загрузкиscalarЗакрутите сопротивление из-за квадрата изгиба и загрузки, QSY6, безразмерного.
Torque resistance due to load, QSY7 — Закрутите сопротивление, должное загружатьscalarЗакрутите сопротивление, должное загружать, QSY7, безразмерный.
Torque resistance due to pressure, QSY8 — Закрутите сопротивление из-за давленияscalarЗакрутите сопротивление из-за давления, QSY8, безразмерного.
Trail slope factor for trail Bpt at FZNOM, QBZ1 — Фактор наклона следа в номинальной силеscalarФактор наклона следа для следа Bpt в номинальной силе, FZNOM, QBZ1, безразмерном.
Bpt slope variation with load, QBZ2 — Наклонное изменение с загрузкойscalarНаклонное изменение с загрузкой, QBZ2, безразмерным.
Bpt slope variation with square of load, QBZ3 — Наклонное изменение с загрузкойscalarНаклонное изменение с квадратом загрузки, QBZ3, безразмерного.
Bpt slope variation with camber, QBZ4 — Наклонное изменение с изгибомscalarНаклонное изменение с изгибом, QBZ4, безразмерным.
Bpt slope variation with absolute value of camber, QBZ5 — Наклонное изменение с изгибомscalarНаклонное изменение с абсолютным значением изгиба, QBZ5, безразмерного.
Bpt slope variation with square of camber, QBZ6 — Наклонное изменение с изгибомscalarНаклонное изменение с квадратом изгиба, QBZ6, безразмерного.
Br of Mzr slope scaling factor, QBZ9 — Наклонный масштабный коэффициентscalarНаклонный масштабный коэффициент, QBZ9, безразмерный.
Br of Mzr cornering stiffness factor, QBZ10 — Движение на повороте фактора жесткостиscalarБром Mzr, загоняющего в угол фактор жесткости, QBZ10, безразмерный.
Cpt pneumatic trail shape factor, QCZ1 — Пневматический масштабный фактор следаscalarПневматический масштабный фактор следа, Cpt, QCZ1, безразмерный.
Dpt peak trail, QDZ1 — Пиковый следscalarПиковый след, Dpt, QDZ1, безразмерный.
Dpt peak trail variation with load, QDZ2 — Пиковое изменение следа с загрузкойscalarПиковый след, Dpt, изменение с загрузкой, QDZ2, безразмерным.
Dpt peak trail variation with camber, QDZ3 — Пиковое изменение следа с изгибомscalarПиковый след, Dpt, изменение с изгибом, QDZ3, безразмерным.
Dpt peak trail variation with square of camber, QDZ4 — Пиковое изменение следа с изгибомscalarПиковый след, Dpt, изменение с квадратом изгиба, QDZ4, безразмерного.
Dmr peak residual torque, QDZ6 — Пиковый остаточный крутящий моментscalarПиковый остаточный крутящий момент, Dmr, QDZ6, безразмерный.
Dmr peak residual torque variation with load, QDZ7 — Пиковая невязка закручивает изменение с загрузкойscalarПиковый остаточный крутящий момент, Dmr, изменение с загрузкой, QDZ7, безразмерным.
Dmr peak residual torque variation with camber, QDZ8 — Пиковая невязка закручивает изменение с изгибомscalarПиковый остаточный крутящий момент, Dmr, изменение с изгибом, QDZ8, безразмерным.
Dmr peak residual torque variation with camber and load, QDZ9 — Пиковая невязка закручивает изменение с изгибом и загрузкуscalarПиковый остаточный крутящий момент, Dmr, изменение с изгибом и загрузка, QDZ9, безразмерный.
Dmr peak residual torque variation with square of camber, QDZ10 — Пиковая невязка закручивает изменение с изгибомscalarПиковый остаточный крутящий момент, Dmr, изменение с квадратом изгиба, QDZ10, безразмерного.
Dmr peak residual torque variation with square of load, QDZ11 — Пиковая невязка закручивает изменение с загрузкойscalarПиковый остаточный крутящий момент, Dmr, изменение с квадратом загрузки, QDZ11, безразмерного.
Ept trail curvature at FZNOM, QEZ1 — Искривление следа в номинальной силеscalarИскривление следа, Ept, в номинальной силе, FZNOM, QEZ1, безразмерном.
Ept variation with load, QEZ2 — Изменение искривления следа с загрузкойscalarИскривление следа, изменение Ept с загрузкой, QEZ2, безразмерным.
Ept variation with square of load, QEZ3 — Изменение искривления следа с загрузкойscalarИскривление следа, изменение Ept с квадратом загрузки, QEZ3, безразмерного.
Ept variation with sign of alpha-t, QEZ4 — Изменение искривления следаscalarИскривление следа, изменение Ept со знаком альфы-t, QEZ4, безразмерного.
Ept variation with sign of alpha-t and camber, QEZ5 — ИзменениеscalarИскривление следа, изменение Ept со знаком альфы-t и изгиба, QEZ5, безразмерного.
Sht horizontal trail shift at FZNOM, QHZ1 — Горизонтальный сдвиг следа при номинальной загрузкеscalarГоризонтальный сдвиг следа, Sht, при номинальной загрузке, FZNOM, QHZ1, безразмерном.
Sht variation with load, QHZ2 — Горизонтальное изменение сдвига следа с загрузкойscalarГоризонтальный сдвиг следа, Sht, изменение с загрузкой, QHZ2, безразмерным.
Sht variation with camber, QHZ3 — Горизонтальное изменение сдвига следа с изгибомscalarГоризонтальный сдвиг следа, Sht, изменение с изгибом, QHZ3, безразмерным.
Sht variation with load and camber, QHZ4 — Горизонтальное изменение сдвига следа с загрузкой и изгибомscalarГоризонтальный сдвиг следа, Sht, изменение с загрузкой и изгибом, QHZ4, безразмерным.
Inflation pressure influence on trail length, PPZ1 — Влияние давления на длину следаscalarДавление инфляции влияет на длине следа, PPZ1, безразмерном.
Inflation pressure influence on residual aligning torque, PPZ2 — Влияние давления на выравнивающийся крутящий моментscalarДавление инфляции влияет на крутящем моменте выравнивания невязки, PPZ2, безразмерном.
Nominal value of s/R0: effect of Fx on Mz, SSZ1 — Эффект продольной силы на выравнивающемся крутящем моментеscalarНоминальная стоимость s/R0: эффект продольной силы, Fx, на выравнивающемся крутящем моменте, Mz, SSZ1, безразмерном.
s/R0 variation with lateral to nominal force ratio, SSZ2 — Изменение с ответвлением к номинальному отношению силыscalarИзменение с ответвлением к номинальному отношению силы, SSZ2, безразмерному.
s/R0 variation with camber, SSZ3 — Изменение с изгибомscalarИзменение с изгибом, SSZ3, безразмерным.
s/R0 variation with camber and load, SSZ4 — Изменение с изгибом и загрузкаscalarИзменение с изгибом и загрузка, SSZ4, безразмерный.
Fx peak reduction due to spin, PDXP1 — Продольное сокращение пика силы, должное вращатьсяscalarПродольная сила, Fx, пиковое сокращение, должное вращаться, PDXP1, безразмерный.
Fx peak reduction due to spin with varying load, PDXP2 — Продольное сокращение пика силы, должное вращатьсяscalarПродольная сила, Fx, пиковое сокращение, должное вращаться с различной загрузкой, PDXP2, безразмерным.
Fx peak reduction due to spin with slip ratio, PDXP3 — Продольное сокращение пика силы, должное вращатьсяscalarПродольная сила, Fx, пиковое сокращение, должное вращаться с отношением промаха, PDXP3, безразмерным.
Cornering stiffness reduction due to spin, PKYP1 — Сокращение жесткости, должное вращатьсяscalarЗагоняя в угол сокращение жесткости, должное вращаться, PKYP1, безразмерный.
Fy peak reduction due to spin, PDYP1 — Боковое сокращение пика силы, должное вращатьсяscalarБоковая сила, Fy, пиковое сокращение, должное вращаться, PDYP1, безразмерный.
Fy peak reduction due to spin with varying load, PDYP2 — Боковое сокращение пика силы, должное вращатьсяscalarБоковая сила, Fy, пиковое сокращение, должное вращаться с различной загрузкой, PDYP2, безразмерным.
Fy peak reduction due to spin with slip angle, PDYP3 — Боковое сокращение пика силы, должное вращатьсяscalarБоковая сила, Fy, пиковое сокращение, должное вращаться с углом промаха, PDYP3, безразмерным.
Fy peak reduction due to square root of spin, PDYP4 — Боковое сокращение пика силы, должное вращатьсяscalarБоковая сила, Fy, пиковое сокращение из-за квадратного корня из вращения, PDYP4, безразмерного.
Fy vs. slip angle response lateral shift limit, PHYP1 — Боковая сила по сравнению с угловым ответом промахаscalarБоковая сила, Fy, по сравнению с угловым ответвлением ответа промаха переключают предел, PHYP1, безразмерный.
Fy vs. slip angle response max lateral shift limit, PHYP2 — Боковая сила по сравнению с угловым ответом промахаscalarБоковая сила, Fy, по сравнению с угловым ответом промаха макс. боковой предел сдвига, PHYP2, безразмерный.
Fy vs. slip angle response max lateral shift limit with load, PHYP3 — Боковая сила по сравнению с угловым ответом промахаscalarБоковая сила, Fy, по сравнению с угловым ответом промаха макс. боковой предел сдвига с загрузкой, PHYP3, безразмерным.
Fy vs. slip angle response lateral shift curvature factor, PHYP4 — Боковая сила по сравнению с угловым ответом промахаscalarБоковая сила, Fy, по сравнению с угловым ответвлением ответа промаха переключают фактор искривления, PHYP4, безразмерный.
Camber stiffness reduction due to spin, PECP1 — Сокращение жесткости изгибаscalarСокращение жесткости изгиба, должное вращаться, PECP1, безразмерный.
Camber stiffness reduction due to spin with load, PECP2 — Сокращение жесткости изгибаscalarСокращение жесткости изгиба, должное вращаться с загрузкой, PECP2, безразмерным.
Turn slip pneumatic trail reduction factor, QDTP1 — Поверните промах пневматический фактор сокращения следаscalarПоверните промах пневматический фактор сокращения следа, QDTP1, безразмерный.
Turn moment for constant turning and zero longitudinal speed, QCRP1 — Поверните момент для постоянного превращенияscalarПоверните момент для постоянного превращения и обнулите продольную скорость, QCRP1, безразмерный.
Turn slip moment increase with spin at 90deg slip angle, QCRP2 — Поверните момент промахаscalarПоверните увеличение момента промаха с вращением под углом промаха на 90 градусов, QCRP2, безразмерным.
Residual spin torque reduction from side slip, QBRP1 — Остаточное сокращение крутящего момента вращенияscalarОстаточное сокращение крутящего момента вращения от заноса, QBRP1, безразмерного.
Turn slip moment peak magnitude, QDRP1 — Поверните величину пика момента промахаscalarПоверните величину пика момента промаха, QDRP1, безразмерный.
Turn slip moment curvature, QDRP2 — Поверните искривление момента промахаscalarПоверните искривление момента промаха, QDRP2, безразмерный.
[1] Besselink, я. J, M., А. Дж. К. Шмайц и Х. Б. Пэседжка. "Улучшенная Волшебная модель шины Формулы / Свифта, которая может обработать скачки давления инфляции". Системная Динамика транспортного средства - Международный журнал Механики Транспортного средства и Мобильности. Издание 48, 2010. doi: 10.1080/00423111003748088.
[2] Pacejka, Х. Б. Тайр и Динамика аппарата. 3-й редактор Оксфорд, Соединенное Королевство: SAE и Баттерворт-Хейнеманн, 2012.
[3] Шмид, Стивен Р., Бернард Дж. Хэмрок и Филиал О. Джейкобсон. "Глава 18: Тормоза и Муфты". Основные принципы Элементов Машины, Версии SI. 3-й редактор Бока-Ратон, FL: Нажатие CRC, 2014.
[1] Переизданный с разрешением Copyright © 2008 SAE International. Дальнейшее распределение этого материала не разрешено без предшествующего разрешения от SAE.
