Model-Based Calibration Toolbox™ позволяет вам генерировать оптимизированные параметры приостановки для Independent Suspension - Mapped и блоков Solid Axle Suspension - Mapped при помощи кинематики (K) и податливость (C) виртуальная тестовая лаборатория.
Чтобы создать и открыть рабочую копию K и виртуальный тестовый пример готовых узлов лаборатории C, войти
K и виртуальная тестовая лаборатория C содержат транспортное средство, систему тестирования и тестовые подсистемы управления. Система транспортного средства имеет два варианта:
Simscape Multibody Vehicle — Транспортное средство с системой подвески Simscape™ Multibody™
VDBS Vehicle — Транспортное средство с блоком Independent Suspension - Mapped
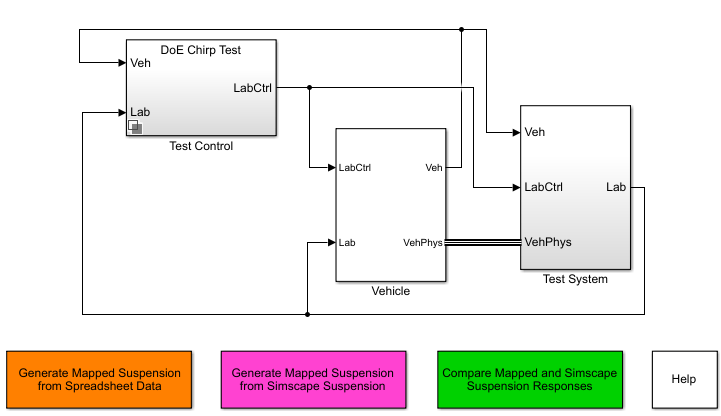
Эта таблица суммирует виртуальные тестовые лабораторные испытания.
| Тест | Цель | Метод |
|---|---|---|
Сгенерируйте сопоставленную приостановку из данных об электронной таблице | Используйте измеренную вертикальную силу и данные о геометрии приостановки, чтобы сгенерировать калиброванные параметры приостановки для сопоставленных блоков приостановки. Примечание Можно использовать стороннюю имитационную модель, чтобы сгенерировать измеренные данные о приостановке. |
Виртуальная тестовая лаборатория использует Model-Based Calibration Toolbox, чтобы соответствовать углу изгиба, углу пальца ноги и вертикальным моделям ответа силы для данных. Виртуальная тестовая лаборатория затем использует модели ответа, чтобы сгенерировать параметры приостановки для блоков приостановки. |
Сгенерируйте сопоставленную приостановку от приостановки Simscape | Используйте систему подвески Simscape Multibody, чтобы сгенерировать калиброванные параметры приостановки для сопоставленных блоков приостановки. |
Виртуальная тестовая лаборатория использует Model-Based Calibration Toolbox, чтобы выполнить проект экспериментов (DoE) последовательности Sobol на высоте приостановки и handwheel угловых рабочих точках. В каждой рабочей точке пример готовых узлов стимулирует систему подвески Simscape Multibody с сигналом щебета по частотному диапазону 0,1 к 2 Гц. Виртуальная тестовая лаборатория затем использует данные, чтобы соответствовать приостановке вертикальная сила, угол изгиба и угол пальца ноги с Гауссовой моделью процесса (GPM) в зависимости от состояния приостановки. Наконец, пример готовых узлов использует GPM, чтобы сгенерировать параметры приостановки для блоков приостановки. |
Сравните сопоставленный и ответы приостановки Simscape | Сравните сопоставленную приостановку с результатами приостановки Simscape Multibody. |
Виртуальная тестовая лаборатория стимулирует приостановку Simscape Multibody в одной рабочей точке и затем сравнивает ответ на сопоставленную приостановку. |
Виртуальная тестовая лаборатория использует Model-Based Calibration Toolbox, чтобы соответствовать углу изгиба, углу пальца ноги и вертикальным моделям ответа силы для данных. Виртуальная тестовая лаборатория затем использует модели ответа, чтобы сгенерировать параметры приостановки для блоков приостановки.
Используйте поле Spreadsheet file, чтобы обеспечить файл данных. По умолчанию пример готовых узлов имеет KandCTestData.xlsx содержа требуемые данные. Таблица суммирует требования файла данных для генерации калиброванных таблиц.
| Данные | Описание | Требования к данным для генерации сопоставленных таблиц приостановки |
|---|---|---|
| z | Вертикальная высота приостановки оси, в m | Необходимый |
| zdot | Вертикальные точки останова высоты приостановки оси скорости, в m/s | Необходимый |
| str | Регулирование угла, в рад | Необходимый |
| Fz | Вертикальная сила приостановки оси, в N | Необходимый |
| приблизительно | Угол изгиба, в рад | Необходимый |
| tA | Угол пальца ноги, в рад | Необходимый |
Нажмите Generate mapped suspension calibration, чтобы сгенерировать модели поверхности ответа в Model-Based Calibration Toolbox.
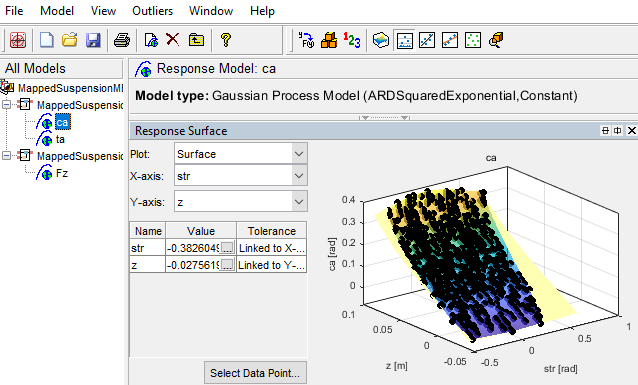
Model Browser открывается, когда процесс завершается. Можно просмотреть угол изгиба, ca, угол пальца ноги, ta, и вертикальную силу, Fz, модель ответа соответствует данным.
Нажмите Apply calibration to mapped suspension model. Виртуальная тестовая лаборатория использует модели ответа, чтобы сгенерировать калиброванную приостановку и данные о точке останова.
Нажмите OK, чтобы обновить блоки приостановки и рабочее пространство модели.
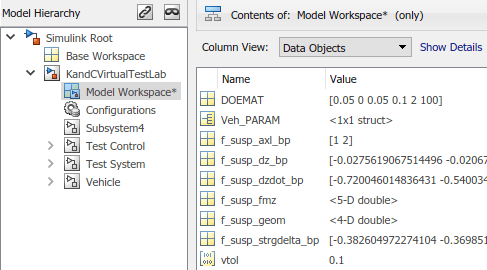
В Model Explorer можно просмотреть сгенерированные параметры приостановки.
| Параметр | Переменная рабочего пространства модели | Описание |
|---|---|---|
Axle breakpoints, f_susp_axl_bp |
| Точки останова оси, P, безразмерный. |
Vertical axis suspension height breakpoints, f_susp_dz_bp |
| Вертикальные точки останова высоты приостановки оси, M, в m. |
Vertical axis suspension height velocity breakpoints, f_susp_dzdot_bp |
| Вертикальные точки останова высоты приостановки оси скорости, N, в m/s. |
Vertical axis suspension force and moment responses, f_susp_fmz |
|
|
Suspension geometry responses, f_susp_geom |
|
|
Steering angle breakpoints, f_susp_strgdelta_bp |
| Регулируя угловые точки останова, O, в рад. |
Виртуальная тестовая лаборатория использует Model-Based Calibration Toolbox, чтобы выполнить проект экспериментов (DoE) последовательности Sobol на высоте приостановки и handwheel угловых рабочих точках. В каждой рабочей точке пример готовых узлов стимулирует систему подвески Simscape Multibody с сигналом щебета по частотному диапазону 0,1 к 2 Гц. Виртуальная тестовая лаборатория затем использует данные, чтобы соответствовать приостановке вертикальная сила, угол изгиба и угол пальца ноги с Гауссовой моделью процесса (GPM) в зависимости от состояния приостановки. Наконец, пример готовых узлов использует GPM, чтобы сгенерировать параметры приостановки для блоков приостановки.
Тестовая лаборатория осуществляет систему подвески с настройками DOE, содержавшимися в DOEMAT массив. Просмотреть DOEMAT значения массивов, открытые Model Explorer.
| Элемент | Описание |
|---|---|
| Высота приостановки |
| Угол Handwheel |
| Амплитуда сигнала щебета |
| Запуск частоты щебета |
| Окончание частоты щебета |
| Время симуляции, чтобы завершить щебет сигнализирует о частотном диапазоне |
Генерация может занять время, чтобы запустить и замедлить другие компьютерные процессы. Просмотрите прогресс окна MATLAB®.
В Model Explorer можно просмотреть сгенерированные параметры приостановки.
| Параметр | Переменная рабочего пространства модели | Описание |
|---|---|---|
Axle breakpoints, f_susp_axl_bp |
| Точки останова оси, P, безразмерный. |
Vertical axis suspension height breakpoints, f_susp_dz_bp |
| Вертикальные точки останова высоты приостановки оси, M, в m. |
Vertical axis suspension height velocity breakpoints, f_susp_dzdot_bp |
| Вертикальные точки останова высоты приостановки оси скорости, N, в m/s. |
Vertical axis suspension force and moment responses, f_susp_fmz |
|
|
Suspension geometry responses, f_susp_geom |
|
|
Steering angle breakpoints, f_susp_strgdelta_bp |
| Регулируя угловые точки останова, O, в рад. |
Виртуальная тестовая лаборатория стимулирует приостановку Simscape Multibody в одной рабочей точке и затем сравнивает ответ на сопоставленную приостановку.
Чтобы стимулировать модель приостановки Simscape Multibody, тестовая лаборатория использует с настройками DOE, содержавшимися в DOEMAT массив.
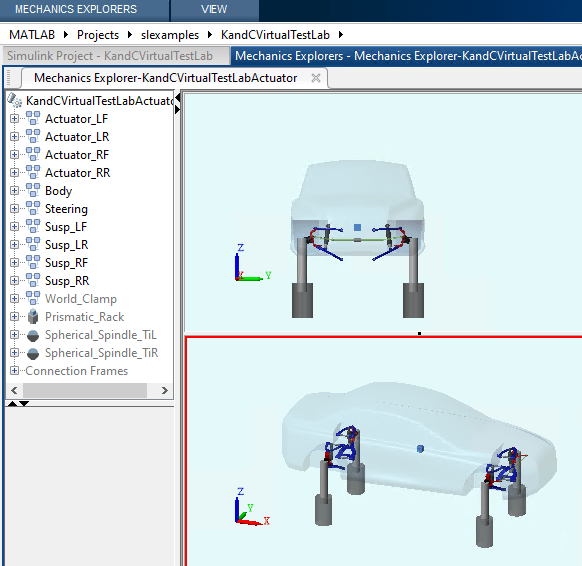
Во время симуляции, чтобы просмотреть систему подвески, выбирают вкладку Mechanics Explorers.
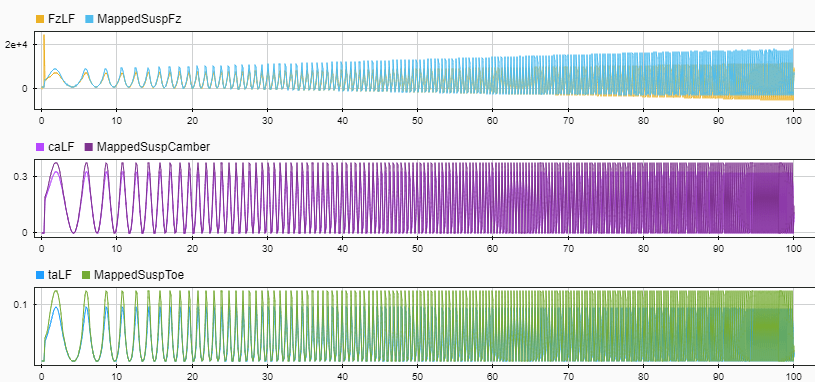
После того, как симуляция завершается, используйте Инспектора Данных моделирования, чтобы сравнить ответ системы подвески для сопоставленной приостановки и модели приостановки Simscape Multibody. Например, сравните вертикальную силу, угол изгиба и угловые ответы пальца ноги.
Independent Suspension - Mapped | Solid Axle Suspension - Mapped
