Ориентированный на крутящий момент полевой контроллер для синхронного двигателя с внутренним постоянным магнитом
Блоксеть силового агрегата/силовые/электрические моторные контроллеры
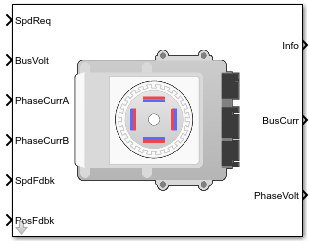
Блок внутреннего контроллера PM реализует ориентированный на крутящий момент полевой контроллер для синхронного двигателя с внутренним постоянным магнитом (PMSM) с дополнительным контроллером скорости внешнего контура. Внутреннее управление крутящим моментом реализует стратегии достижения максимального крутящего момента на ампер (MTPA) и ослабления магнитного потока. Можно указать тип управления скоростью или крутящим моментом.
Внутренний контроллер PM реализует уравнения для управления скоростью, определения крутящего момента, регуляторов, преобразований и двигателей.
Рисунок иллюстрирует поток информации в блоке.
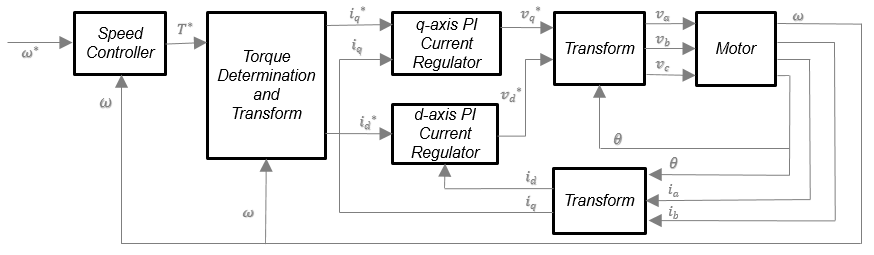
Блок реализует уравнения, использующие эти переменные.
| ω | Частота вращения ротора |
| ω* | Команда частоты вращения ротора |
| Т * | Команда крутящего момента |
я бы я бы | Ток по оси d команда тока d-axis |
IQ i * q | Ток по оси q команда тока по оси q |
vd, v * d | Напряжение по оси d команда напряжения по оси d |
vq v * q | Напряжение по оси q команда напряжения по оси q |
| va, vb, vc | Напряжения фаз a, b, c статора |
| ia, ib, ic | Токи фаз a, b, c статора |
Для реализации контроллера скорости выберите параметр Control Type Speed Control. При выборе параметра «Тип элемента управления» Torque Controlблок не реализует контроллер скорости.
Контроллер скорости определяет команду крутящего момента, реализуя фильтр состояния и вычисляя команды обратной связи и обратной связи. Если контроллер скорости не реализован, введите команду крутящего момента в блок внутреннего контроллера PM.
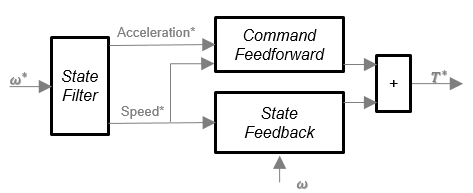
Фильтр состояния является фильтром нижних частот, который генерирует команду ускорения на основе команды скорости. На вкладке Контроллер скорости:
Чтобы уменьшить время задержки команды speed-command, укажите значение Bandwidth параметра state filter.
Чтобы вычислить постоянную времени регулирования скорости, коэффициент усиления Ksf на основе полосы пропускания фильтра состояния, выберите «Вычислить коэффициенты усиления регулятора скорости».
Дискретная форма характеристического уравнения задаётся:
− 1
Фильтр вычисляет коэффициент усиления, используя это уравнение.
Tsm2āEVsf) Цм
Уравнения используют эти переменные.
| EVsf | Полоса пропускания фильтра команд скорости |
| Tsm | Время выборки контроллера движения |
| Ksf | Постоянная времени регулятора скорости |
Для формирования крутящего момента обратной связи состояния блок использует отфильтрованный сигнал ошибки скорости от фильтра состояния. Расчет крутящего момента обратной связи также требует усиления регулятора скорости.
На вкладке Регулятор скорости (Speed Controller) выберите Рассчитать коэффициенты усиления регулятора скорости (Calculate Speed Regulator Gains) для
Пропорциональный коэффициент усиления, ba
Угловой коэффициент усиления, Кса
Коэффициент усиления вращения, Киса
Для расчета коэффициента усиления блок использует инерцию от значения параметра Физическая инерция (Physical inertia), значение параметра вязкого демпфирования, статического трения на вкладке Параметры двигателя (Motor Parameters).
Коэффициенты усиления для обратной связи состояния вычисляются с использованием этих уравнений.
| Вычисление | Уравнения |
|---|---|
| Дискретные формы характеристического уравнения | Jpz + − Jp + TsbaJp + p2p3 + p13) z2 − p1p2p3 |
Пропорциональный коэффициент усиления регулятора скорости | Jpp1p2p3Tsm |
Интегральный коэффициент усиления регулятора скорости | 2baTsmTsm2 |
Двойной интегральный коэффициент усиления регулятора скорости | − KsaTsm2Tsm3 |
Уравнения используют эти переменные.
| P | Пары полюсов двигателя |
| ba | Пропорциональный коэффициент усиления регулятора скорости |
| Ksa | Интегральный коэффициент усиления регулятора скорости |
| Kisa | Двойной интегральный коэффициент усиления регулятора скорости |
| Мировой судья | Инерция двигателя |
| Tsm | Время выборки контроллера движения |
Для формирования крутящего момента в направлении состояния блок использует отфильтрованную скорость и ускорение из фильтра состояния. Кроме того, при расчете крутящего момента в прямом направлении используются инерция, вязкое демпфирование и статическое трение. Для достижения ошибки отслеживания нуля команда крутящего момента представляет собой сумму команд передачи и обратной связи крутящего момента.
При выборе пункта Рассчитать коэффициенты усиления регулятора скорости (Calculate Speed Regulator Gains) на вкладке Регулятор скорости (Speed Controller) обновляются значения инерции, вязкого демпфирования и статического трения с помощью параметров физической инерции, вязкого демпфирования и статического трения на вкладке Параметры двигателя (Motor Parameters).
Команда передачи крутящего момента использует это уравнение.
|
где:
| Мировой судья | Инерция двигателя |
| Tcmd_ff | Передача команды на крутящий момент |
| Фс | Постоянная крутящий момент статического трения |
| Fv | Постоянный крутящий момент при вязком трении |
| Фс | Постоянная крутящий момент статического трения |
| ωm | Частота вращения ротора |
Блок использует максимальную траекторию крутящего момента на ампер (MTPA) для вычисления базовой скорости и текущих команд. Доступное напряжение шины определяет базовую скорость. Прямой (d) и квадратурный (q) постоянный магнит (PM) определяют индуцированное напряжение.
| Вычисление | Уравнения |
|---|---|
| Переход скорости электрической базы в ослабление поля | λ pm) 2 |
| Напряжение по оси d | starteLqiqmax |
| Напряжение по оси q | λ pm) |
| Максимальный фазовый ток | iq _ max2 |
| Максимальное напряжение от линии до нейтрали | 3 |
| Таблица токов фазы d-оси MTPA | Lq − Ld) 2 + Im22 |
| Таблица фазового тока MTPA по оси q | 2 |
| Моменты останова MTPA | идиq) |
| Ослабление поля, использование ограничений напряжения на основе скорости | vmax2group2 id2 vmax2ü e2 = 0 Ld2 − Lq2) idfwiqfw) |
| Текущая команда | If Else If Else End End |
Уравнения используют эти переменные.
| IMAX | Максимальный фазовый ток |
| я бы | Ток по оси d |
| IQ | Ток по оси q |
| id_max | Максимальный фазовый ток по d-оси |
| iq_max | Максимальный фазовый ток по оси q |
| id_mtpa | Таблица токов фазы d-оси MTPA |
| iq_mtpa | Таблица фазового тока MTPA по оси q |
| Я | Расчетный максимальный ток |
| idfw | ток ослабления поля d-оси |
| iqfw | ток ослабления поля по оси q |
| ωe | Электрическая частота вращения ротора |
| λpm | Связь постоянного магнитного потока |
| vd | Напряжение по оси d |
| vq | Напряжение по оси q |
| vmax | Максимальное напряжение от линии до нейтрали |
| vbus | Напряжение шины постоянного тока |
| Ld | индуктивность обмотки d-оси |
| Lq | индуктивность обмотки по оси q |
| P | Пары полюсов двигателя |
| Tfw | Момент ослабления поля |
| Tmtpa | Моменты останова MTPA |
Блок регулирует ток с помощью функции защиты от навивки. Классические регуляторы тока пропорционального интегратора (PI) не учитывают связь d-оси и q-оси или связь обратной электромагнитной силы (EMF). В результате ухудшаются переходные рабочие характеристики. Для учета связи блок реализует комплексный векторный регулятор тока (CVCR) в скалярном формате опорной рамы ротора. CVCR разъединяет:
Перекрестная связь тока по оси d и оси q
Поперечная муфта обратной ЭДС
Текущая частотная характеристика представляет собой систему первого порядка с полосой пропускания EVтока.
Блок реализует эти уравнения.
| Вычисление | Уравнения |
|---|---|
| Напряжение двигателя, в системе отсчета ротора | |
| Текущая прибыль регулятора | Lqü bKi = Rsstartb |
| Передаточные функции |
Уравнения используют эти переменные.
| EVcurrent | Текущая полоса пропускания регулятора |
| я бы | Ток по оси d |
| IQ | Ток по оси q |
| Kp_d | Усиление по оси d регулятора тока |
| Kp_q | Усиление по оси q регулятора тока |
| Ld | индуктивность обмотки d-оси |
| Lq | индуктивность обмотки по оси q |
| RS | Сопротивление фазной обмотки статора |
| ωm | Частота вращения ротора |
| vd | Напряжение по оси d |
| vq | Напряжение по оси q |
| λpm | Связь постоянного магнитного потока |
| P | Пары полюсов двигателя |
Для вычисления напряжений и токов в сбалансированных трехфазных (a, b) величинах, квадратурных двухфазных (α, β) величинах и вращающихся (d, q) опорных кадрах блок использует преобразования Кларка и Парка.
В уравнениях преобразования.
starte
| Преобразовать | Описание | Уравнения |
|---|---|---|
Кларк | Преобразует сбалансированные трехфазные величины (a, b) в сбалансированные двухфазные квадратурные величины (α, β). | 32xc |
Парк | Преобразует сбалансированные двухфазные ортогональные стационарные величины (α, β) в ортогональный вращающийся опорный кадр (d, q). | xβcosstarte |
Обратный Кларк | Преобразует сбалансированные двухфазные квадратурные величины (α, β) в сбалансированные трехфазные величины (a, b). | − 32xβ |
Обратный парк | Преобразует ортогональный вращающийся опорный кадр (d, q) в сбалансированные двухфазные ортогональные стационарные величины (α, β). | xqcosstarte |
Преобразования используют эти переменные.
| ωm | Частота вращения ротора |
| P | Пары полюсов двигателя |
| ωe | Электрическая частота вращения ротора |
| Θe | Электрический угол ротора |
| x | Фазный ток или напряжение |
Блок использует фазные токи и фазные напряжения для оценки тока шины постоянного тока. Положительный ток указывает на разряд батареи. Отрицательный ток указывает на заряд батареи. Блок использует эти уравнения.
|
Мощность нагрузки | vc ic |
|
Питание источника | PwrLoss |
|
Ток шины постоянного тока | SrcPwrvbus |
|
Расчетный крутящий момент ротора | Lq) идиq] |
|
Потеря мощности для одного источника КПД на нагрузку | |
|
Потеря мощности для одной нагрузки КПД на источник | |
|
Потеря мощности для табличной эффективности | MtrTrqest) |
Уравнения используют эти переменные.
| va, vb, vc |
Напряжения фаз a, b, c статора |
| vbus |
Расчетное напряжение шины постоянного тока |
| ia, ib, ic |
Токи фаз a, b, c статора |
| ibus |
Расчетный ток шины постоянного тока |
| Эффективность |
Общая эффективность инвертора |
| ωm |
Механическая частота вращения ротора |
| Lq |
индуктивность обмотки по оси q |
| Ld |
индуктивность обмотки d-оси |
| IQ |
Ток по оси q |
| я бы |
Ток по оси d |
| λ |
Связь постоянного магнитного потока |
| P |
Пары полюсов двигателя |
Чтобы задать электрические потери, на вкладке Электрические потери (Electrical Losts) в поле Параметризовать потери (Parameterize losts by) выберите одну из этих опций.
| Настройка | Блокирование реализации |
|---|---|
Single efficiency measurement | Электрические потери, рассчитанные с использованием постоянного значения эффективности инвертора. |
Tabulated loss data | Электрические потери, рассчитанные как функция скоростей двигателя и крутящих моментов нагрузки. |
Tabulated efficiency data | Электрические потери, рассчитанные с использованием эффективности инвертора, которая является функцией скоростей двигателя и крутящих моментов нагрузки.
|
Для получения рекомендаций используйте Tabulated loss data вместо Tabulated efficiency data:
Эффективность становится плохо определенной для нулевой скорости или нулевого крутящего момента.
Вы можете учесть фиксированные потери, которые все еще присутствуют для нулевой скорости или крутящего момента.
[1] Лоренц, Роберт Д., Томас Липо и Дональд У. Новотны. «Управление движением с помощью асинхронных двигателей». Материалы IEEE ®, том 82, выпуск 8, август 1994 года, стр. 1215-1240.
[2] Моримото, Сигэо, Масаюка Санада и Ёдзи Такэда. «Широкополосная работа внутренних синхронных двигателей постоянного магнита с высокопроизводительным регулятором тока». IEEE Transactions on Industry Applications, Vol. 30, Issue 4, July/August 1994, pp. 920-926.
[3] Ли, Муян. «Управление ослаблением потока для синхронных двигателей с постоянным магнитом на основе инверторов источника Z». Магистерская диссертация, Университет Маркетт, электронная публикация @ Marquette, осень 2014 года.
[4] Бриз, Фернандо, Майкл У. Дегнер и Роберт Д. Лоренц. «Анализ и проектирование регуляторов тока с использованием сложных векторов». IEEE Transactions on Industry Applications, том 36, выпуск 3, май/июнь 2000 года, стр. 817-825.
[5] Briz, Фернандо, и др. «Регулирование тока и потока в режиме ослабления поля [асинхронных двигателей]» IEEE Transactions on Industry Applications, Vol. 37, Issue 1, Jan/Feb 2001, pp. 42-50.
Контроллер PM на основе потока | Контроллер мгновенных сообщений | Внутренняя PMSM | Контроллер PM для поверхностного монтажа
