Контроллер синхронного двигателя постоянного магнита на основе потока
Блоксеть силового агрегата/силовые/электрические моторные контроллеры
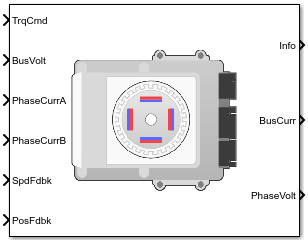
Блок контроллера PM на основе потока реализует ориентированный на поток полевой контроллер для синхронного двигателя с внутренним постоянным магнитом (PMSM) с дополнительным контроллером скорости внешнего контура. Внутреннее управление крутящим моментом реализует стратегии достижения максимального крутящего момента на ампер (MTPA) и ослабления магнитного потока. Можно указать тип управления скоростью или крутящим моментом.
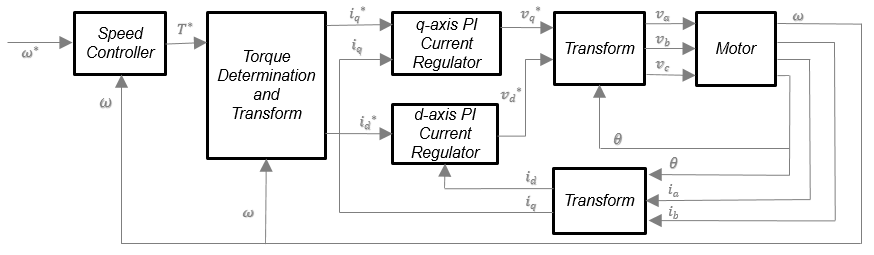
Контроллер PM на основе потока реализует уравнения для управления скоростью, определения крутящего момента, регуляторов, преобразований и двигателей.
Рисунок иллюстрирует поток информации в блоке.
Блок реализует уравнения, используя эти переменные.
| ω |
Частота вращения ротора |
| ω* |
Команда частоты вращения ротора |
| Т * |
Команда крутящего момента |
|
я бы я бы |
Ток по оси d команда тока d-axis |
|
IQ i * q |
Ток по оси q команда тока по оси q |
|
vd, v * d |
Напряжение по оси d команда напряжения по оси d |
|
vq v * q |
Напряжение по оси q команда напряжения по оси q |
| va, vb, vc |
Напряжения фаз a, b, c статора |
| ia, ib, ic |
Токи фаз a, b, c статора |
Для реализации контроллера скорости выберите параметр Control Type Speed Control. При выборе параметра «Тип элемента управления» Torque Controlблок не реализует контроллер скорости.
Контроллер скорости определяет команду крутящего момента, реализуя фильтр состояния и вычисляя команды обратной связи и обратной связи. Если контроллер скорости не реализован, введите команду крутящего момента в блок контроллера PM на основе потока.
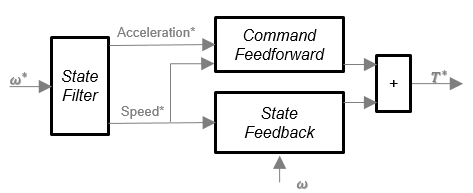
Фильтр состояния является фильтром нижних частот, который генерирует команду ускорения на основе команды скорости. Дискретная форма характеристического уравнения задаётся:
− 1
Фильтр вычисляет коэффициент усиления, используя это уравнение.
Tsm2āEVsf) Цм
Уравнения используют эти переменные.
| EVsf |
Полоса пропускания фильтра команд скорости |
| Tsm |
Время выборки контроллера движения |
| Ksf |
Постоянная времени регулятора скорости |
Для формирования крутящего момента обратной связи состояния блок использует отфильтрованный сигнал ошибки скорости от фильтра состояния. Для фильтрации скорости блок использует пропорциональный интегральный (PI) контроллер.
+KiωzTsmz−1 (ωm*−ωm)
Уравнения используют эти переменные.
| ωm |
Частота вращения ротора |
| λ * m |
Команда частоты вращения ротора |
| Tcmd |
Команда крутящего момента |
| Kpω |
Пропорциональный коэффициент усиления регулятора скорости |
| Kiω |
Интегральный коэффициент усиления регулятора скорости |
| Tsm |
Частота выборок регулятора скорости |
Для формирования крутящего момента в направлении состояния блок использует отфильтрованную скорость и ускорение из фильтра состояния. Кроме того, при расчете крутящего момента в прямом направлении используются инерция, вязкое демпфирование и статическое трение. Для достижения ошибки отслеживания нуля команда крутящего момента представляет собой сумму команд передачи и обратной связи крутящего момента.
Команда передачи крутящего момента использует это уравнение.
|
где:
| Мировой судья |
Инерция ротора |
| Tcmd_ff |
Передача команды на крутящий момент |
| Фс |
Постоянная крутящий момент статического трения |
| Fv |
Постоянный крутящий момент при вязком трении |
| Фс |
Постоянная крутящий момент статического трения |
| ωm |
Частота вращения ротора |
Блок использует таблицы поиска для определения команд тока d-оси и q-оси. Таблицы поиска являются функциями механической скорости и крутящего момента. Для определения таблиц поиска можно использовать внешние модели анализа конечных элементов (КЭА) или результаты испытаний динамометра.
(| startm |, | Tref |)
Уравнения используют эти переменные.
| ωm |
Частота вращения ротора |
| Tref |
Команда крутящего момента |
| idref, iqref |
опорный ток по осям d- и q соответственно |
Блок использует эти уравнения для вычисления напряжения в системе отсчета двигателя.
id, IQ) ψd=f (id, IQ)
Уравнения используют эти переменные.
|
ωm |
Механическая частота вращения ротора |
|
ωe | Электрическая частота вращения ротора |
|
Rs, Rr |
Сопротивление обмоток статора и ротора соответственно |
|
iq, id |
q- и d-осевой ток соответственно |
|
vq, vd |
q- и d-осевое напряжение соответственно |
| Λ q, Λ d |
магнитный поток по оси q- и d соответственно |
| Tst |
Текущая частота выборки регулятора |
| Ребенок , Кик |
интегральный коэффициент усиления по осям d- и q- соответственно |
| Kpd , Kpq |
пропорциональное усиление по осям d- и q- соответственно |
Для вычисления напряжений и токов в сбалансированных трехфазных (a, b) величинах, квадратурных двухфазных (α, β) величинах и вращающихся (d, q) опорных кадрах блок использует преобразования Кларка и Парка.
В уравнениях преобразования.
starte
| Преобразовать | Описание | Уравнения |
|---|---|---|
|
Кларк |
Преобразует сбалансированные трехфазные величины (a, b) в сбалансированные двухфазные квадратурные величины (α, β). | 32xc |
|
Парк |
Преобразует сбалансированные двухфазные ортогональные стационарные величины (α, β) в ортогональный вращающийся опорный кадр (d, q). | xβcosstarte |
|
Обратный Кларк |
Преобразует сбалансированные двухфазные квадратурные величины (α, β) в сбалансированные трехфазные величины (a, b). | − 32xβ |
|
Обратный парк |
Преобразует ортогональный вращающийся опорный кадр (d, q) в сбалансированные двухфазные ортогональные стационарные величины (α, β). | xqcosstarte |
Преобразования используют эти переменные.
| ωm |
Частота вращения ротора |
| P |
Пары полюсов ротора |
| ωe |
Электрическая частота вращения ротора |
| Θe |
Электрический угол ротора |
| x |
Фазный ток или напряжение |
Блок использует фазные токи и фазные напряжения для оценки тока шины постоянного тока. Положительный ток указывает на разряд батареи. Отрицательный ток указывает на заряд батареи.
Блок использует эти уравнения.
|
Мощность нагрузки | vc ic |
|
Питание источника | PwrLoss |
|
Ток шины постоянного тока | SrcPwrvbus |
|
Расчетный крутящий момент ротора | [ |
|
Потеря мощности для одного источника КПД на нагрузку | |
|
Потеря мощности для одной нагрузки КПД на источник | |
|
Потеря мощности для табличной эффективности | MtrTrqest) |
Уравнения используют эти переменные.
| va, vb, vc |
Напряжения фаз a, b, c статора |
| vbus |
Расчетное напряжение шины постоянного тока |
| ia, ib, ic |
Токи фаз a, b, c статора |
| ibus |
Расчетный ток шины постоянного тока |
| Эффективность |
Общая эффективность инвертора |
| ωm |
Механическая частота вращения ротора |
| Lq, Ld |
индуктивность обмотки q- и d-оси соответственно |
| Λ q, Λ d |
магнитный поток по оси q- и d соответственно |
| iq, id |
q- и d-осевой ток соответственно |
| λ |
Связь постоянного магнитного потока |
| P |
Пары полюсов ротора |
Чтобы задать электрические потери, на вкладке Электрические потери (Electrical Losts) в поле Параметризовать потери (Parameterize losts by) выберите одну из этих опций.
| Настройка | Блокирование реализации |
|---|---|
Single efficiency measurement | Электрические потери, рассчитанные с использованием постоянного значения эффективности инвертора. |
Tabulated loss data | Электрические потери, рассчитанные как функция скоростей двигателя и крутящих моментов нагрузки. |
Tabulated efficiency data | Электрические потери, рассчитанные с использованием эффективности инвертора, которая является функцией скоростей двигателя и крутящих моментов нагрузки.
|
Для получения рекомендаций используйте Tabulated loss data вместо Tabulated efficiency data:
Эффективность становится плохо определенной для нулевой скорости или нулевого крутящего момента.
Вы можете учесть фиксированные потери, которые все еще присутствуют для нулевой скорости или крутящего момента.
[1] Ху, Дакай, Язан Алсмади и Лунъя Сюй. «Высокоточное нелинейное моделирование IPM на основе измеренной связи потока обмотки статора». Транзакции IEEE ® по отраслевым приложениям, том 51, № 4, июль/август 2015 г.
[2] Чэнь, Сяо, Цзябинь Ван, Бхаскар Сен, Панагиотис Ласари, Тяньфу Сунь. «Модель высокой точности и вычислительной эффективности для внутренних машин с постоянными магнитами, учитывающая магнитное насыщение, пространственную гармонику и эффект потерь железа». IEEE Transactions on Industrial Electronics, том 62, № 7, июль 2015 года.
[3] Оттоссон, Дж., М. Алакула. «Компактная реализация контроллера ослабления поля». Международный симпозиум по силовой электронике, электрическим приводам, автоматизации и движению, июль 2006 года.
PMSM на основе потока | Контроллер мгновенных сообщений | Внутренний контроллер PM | Контроллер PM для поверхностного монтажа
