ТРЕХФАЗНЫЙ ВНУТРЕННИЙ СИНХРОННЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО МАГНИТА С СИНУСОИДАЛЬНОЙ ОБРАТНОЙ ЭЛЕКТРОДВИЖУЩЕЙ
Блок силового агрегата/движитель/электродвигатели и инверторы
Блок управления двигателем/Электрические системы/Двигатели
Внутренний блок PMSM реализует трехфазный внутренний синхронный двигатель постоянного магнита (PMSM) с синусоидальной обратной электродвижущей силой. Блок использует трехфазные входные напряжения для регулирования индивидуальных фазных токов, что позволяет регулировать крутящий момент или частоту вращения двигателя.
По умолчанию блок устанавливает для параметра «Тип моделирования» значение Continuous для использования непрерывного времени выборки во время моделирования. Если требуется создать код для целей с двойной и одинарной точностью с фиксированным шагом, рекомендуется установить для параметра значение Discrete. Затем укажите параметр Sample Time, Ts.
На вкладке «Параметры» при выборе Back-emfблок реализует это уравнение для вычисления постоянной связи постоянного потока.
На этом рисунке показана конструкция двигателя с одной полюсной парой на двигателе.
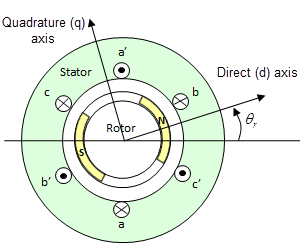
Магнитное поле двигателя за счет постоянных магнитов создает синусоидальную скорость изменения потока с углом двигателя.
Для условного обозначения осей потоки α - фазы и постоянного магнита выравниваются, когда угол λ r двигателя равен нулю.
Блок реализует эти уравнения, выраженные в опорном кадре потока двигателя (кадр dq). Все величины в системе отсчета двигателя относятся к статору.
LqLdPstartmiq
λ Ppm mLq
Lq) идиq]
Индуктивности Lq и Ld представляют соотношение между фазовой индуктивностью и положением двигателя из-за солености двигателя.
Уравнения используют эти переменные.
Lq, Ld | q- и d-осевые индуктивности (H) |
R | Сопротивление обмоток статора (Ом) |
iq, id | q- и d-осевые токи (A) |
vq, vd | q- и d-осевые напряжения (В) |
ωm | Угловая механическая скорость двигателя (рад/с) |
ωe | Угловая электрическая скорость двигателя (рад/с) |
λpm | Постоянная связи постоянного потока (Wb) |
Кэ | Обратная электродвижущая сила (ЭДС) (Vpk_LL/krpm, где Vpk_LL - пиковое напряжение межлинейного измерения) |
P | Количество пар полюсов |
Те | Электромагнитный момент (Нм) |
Θe | Электрический угол (рад) |
Угловая скорость двигателя определяется:
) d
Уравнения используют эти переменные.
J | Комбинированная инерция двигателя и нагрузки (кгм ^ 2) |
F | Комбинированное вязкое трение двигателя и нагрузки (Н· м/( рад/с)) |
θm | Механическое угловое положение двигателя (рад) |
TM | Крутящий момент на валу двигателя (Нм) |
Те | Электромагнитный момент (Нм) |
Tf | Крутящий момент статического трения вала двигателя (Нм) |
ωm | Угловая механическая скорость двигателя (рад/с) |
Для учета мощности блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Механическая мощность | Pmot | startmTe |
PwrBus | Электроэнергия | Pbus | vcnic | ||
|
| PwrElecLoss | Потеря резистивной мощности | Pelec | Rsisq2) | |
PwrMechLoss | Потеря механической мощности | Pmech | Если для параметра Port Configuration установлено значение startm 'Tf) Если для параметра Port Configuration установлено значение 0 | ||
|
| PwrMtrStored | Накопленная мощность двигателя | Pstr | Pmech | |
Уравнения используют эти переменные.
RS | Сопротивление статора (Ом) |
ia, ib, ic | Ток фазы a, b и c статора (A) |
isq, isd | Токи q- и d-оси статора (А) |
фургон, vbn, vcn | Напряжение фазы a, b и c статора (В) |
ωm | Угловая механическая скорость ротора (рад/с) |
F | Комбинированное вязкое демпфирование двигателя и нагрузки (Н· м/( рад/с)) |
Те | Электромагнитный момент (Нм) |
Tf | Комбинированный момент трения двигателя и нагрузки (Нм) |
Блок использует эти уравнения для осуществления инвариантного преобразования dq амплитуды, чтобы гарантировать, что амплитуды dq и три фазы равны.
sin (Startda + 2ā3)] [vavbvc]
((Startda + 2ā3)] [isdisq]
Уравнения используют эти переменные.
Θda | dq электрический угол статора относительно оси а ротора (рад) |
vsq, vsd | Напряжения q- и d-оси статора (В) |
isq, isd | Токи q- и d-оси статора (А) |
| va, vb, vc | Фазы напряжения статора a, b, c (V) |
| ia, ib, ic | Фазы токов статора a, b, c (A) |
[1] Kundur, P. Стабильность и управление энергосистемой. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, П. М. Анализ неисправных энергосистем. Хобокен, Нью-Джерси: Wiley-IEEE Press, 1995.
PMSM на основе потока | Асинхронный двигатель | Внутренний контроллер PM | Сопоставленный двигатель | Поверхностное крепление PMSM
